Clear Sky Science · fr
Reconstruction 3D de structures en mer peu profonde par calibration directe du système et extraction de ligne laser faible
Faire apparaître des mondes sous-marins cachés
Beaucoup des traces les plus fascinantes de notre passé reposent désormais sous l'eau — épaves, cités englouties et ruines côtières. Pour explorer et préserver numériquement ces sites, les chercheurs ont besoin de cartes 3D précises de ce qui se trouve sur le fond marin. Pourtant, en eau peu profonde, la lumière vive du soleil, le sable en suspension et l’eau elle-même rendent les mesures précises étonnamment difficiles. Cet article présente une nouvelle méthode pour scanner et reconstruire des modèles 3D détaillés de structures sous-marines en utilisant un laser bleu basse puissance, même en conditions éclairées et bruyantes où les méthodes existantes échouent en grande partie.
Pourquoi le scan des mers peu profondes est si difficile
Créer un modèle 3D numérique d’une scène revient généralement à assembler des millions de points dans l’espace — ce que les scientifiques appellent un nuage de points. Sur terre, les lasers et les caméras accomplissent cela de façon fiable. Sous l’eau, en revanche, la situation devient compliquée. L’eau dévie et diffuse la lumière, baignant les scènes d'un voile bleu-vert et estompant les contours. La lumière du soleil qui traverse les vagues crée des motifs lumineux mobiles appelés caustiques, qui peuvent noyer la fine ligne d’un laser de faible puissance. Des particules microscopiques ajoutent un voile de brouillard et des reflets scintillants. En conséquence, de nombreux systèmes sous-marins actuels ne fonctionnent qu’à la nuit, en très faible luminosité ou dans des conditions strictement contrôlées — ce qui n’est pas représentatif du comportement des océans réels.
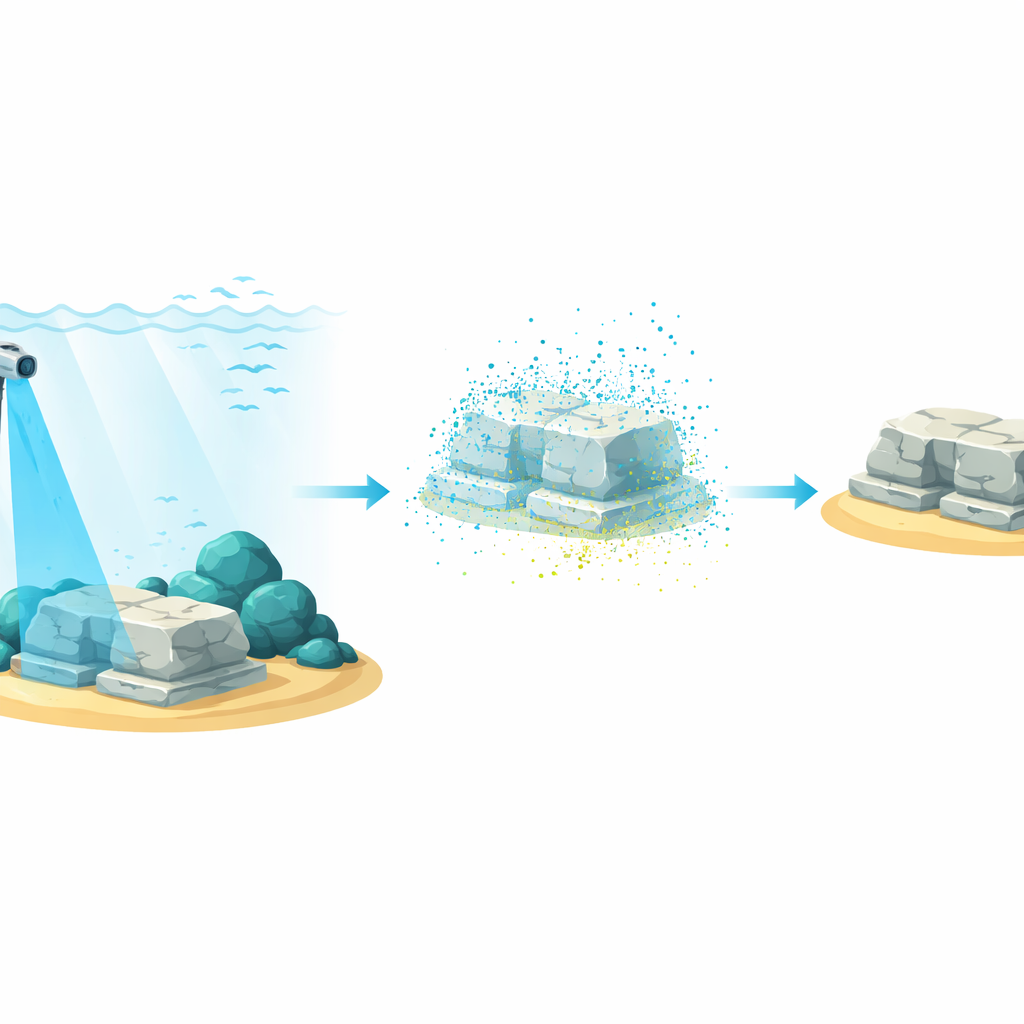
Un laser bleu rotatif comme pinceau 3D
Les auteurs ont construit un scanner compact et étanche qui fonctionne comme un pinceau 3D. Il projette une fine feuille verticale de lumière laser bleue qui balaie l’environnement à mesure que le bras de l’appareil tourne lentement. Là où cette feuille touche un rocher, un mur ou un artefact, elle trace une courbe lumineuse. Une caméra montée près du laser capture des images à chaque petit pas de rotation. En combinant toutes ces vues, le système peut reconstruire un nuage de points 3D dense de l’environnement, avec une couleur approximative, qui peut ensuite être transformé en maillage de surface pour la visualisation ou la réalité virtuelle.
Apprendre au système où se situe chaque pixel dans l’espace
Un défi central de ce type de système est la calibration : déterminer comment chaque pixel de la caméra s’aligne avec les coordonnées du monde réel. Les approches traditionnelles reposent sur des modèles mathématiques détaillés de la caméra et de l’eau, comportant des dizaines de paramètres à régler, ce qui les rend fragiles et sujets aux erreurs. Ici, les chercheurs adoptent une voie axée sur les données. Ils apprennent directement une correspondance entre les pixels d’image et les positions 3D en scannant un mur recouvert d’une grille connue. Quelques centaines de points d’échantillonnage soigneusement choisis suffisent. Une fois stockée dans une table de consultation, cette correspondance permet au scanner de convertir tout pixel laser détecté en un point 3D sans jamais résoudre explicitement d’équations caméras complexes.
Redresser et amplifier une trace bleue faible
Puisque la calibration est effectuée dans l’air, les images sous-marines doivent d’abord être « redressées » pour annuler la déformation causée par la réfraction à la surface de l’eau. L’équipe mesure cette distorsion à l’aide d’images d’une grille qui straddle air et eau, puis calcule comment chaque pixel sous-marin se déplacerait s’il était vu dans l’air. Après ce déwarping, le vrai défi commence : repérer une ligne bleue faible, souvent interrompue, dans une image bruitée. La méthode calcule d’abord une valeur de « bleuâtres » pour chaque pixel, réglée de sorte que la lumière proche de la teinte bleue du laser ressorte. Elle examine ensuite à quel point chaque pixel est plus bleu que ses voisins et utilise un classifieur d’apprentissage automatique pour former une carte grossière en noir et blanc des pixels susceptibles d’appartenir au laser.
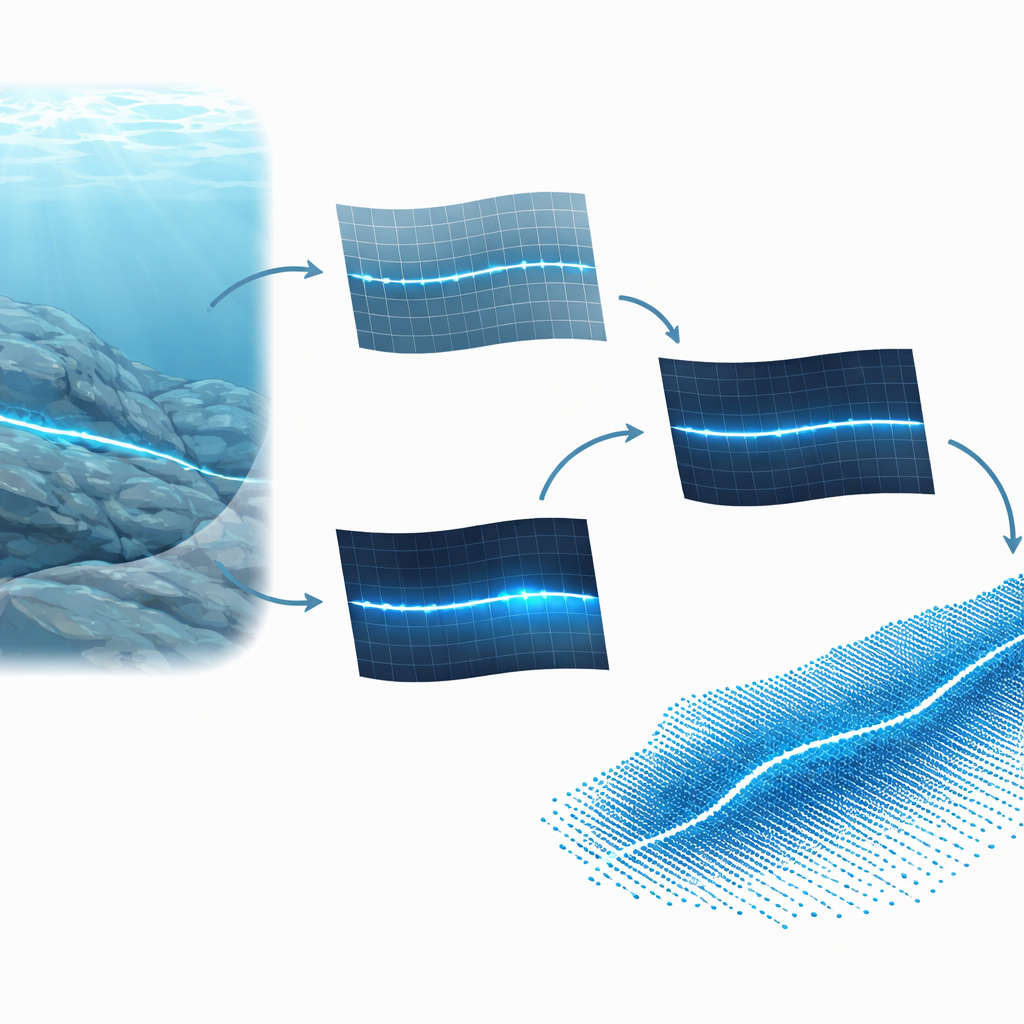
Des points bruyants aux formes 3D nettes
Cette première carte contient encore de nombreux faux positifs provenant du sable, des reflets et des caustiques. Pour la nettoyer, le système recherche des motifs de lignes droites à l’aide d’une technique classique qui vote pour des lignes possibles en fonction des positions des pixels. Il ne conserve que les lignes correspondant à l’orientation attendue du laser. Une courbe lisse est ensuite ajustée aux points restants, et la « confiance » de chaque pixel est augmentée s’il se trouve proche de cette courbe et présente une forte teinte bleue. Pour chaque ligne de l’image, le pixel avec la confiance la plus élevée est choisi comme faisant partie de la trace laser finale. En injectant ces traces nettoyées, pas à pas, dans la table de calibration, on obtient un nuage de points 3D coloré à partir de l’image caméra d’origine.
Quelle est l’efficacité en conditions réelles ?
Les auteurs ont testé leur système en bassins et en mer peu profonde à environ cinq mètres de profondeur, sous un éclairage allant de niveaux intérieurs faibles à un intense soleil de milieu de journée atteignant des dizaines de milliers de lux. Ils ont scanné des objets aux dimensions précisément connues — une sphère et une forme en acrylique sur mesure — et comparé les tailles mesurées à la vérité terrain. À des distances allant jusqu’à environ un demi-mètre, l’erreur typique est restée inférieure à une fraction de millimètre même sous forte luminosité, et est demeurée dans quelques dixièmes de millimètre à des distances supérieures jusqu’à ce que la ligne laser devienne presque invisible à l’œil. Les méthodes existantes conçues pour des conditions sombres n’ont pas pu reconstruire les scènes à ces niveaux d’éclairage élevés.
Ce que cela change pour l’exploration des sites sous-marins
Essentiellement, ce travail montre que la cartographie 3D précise des structures sous-marines peu profondes ne nécessite pas de lasers puissants encombrants ni d’obscurité parfaitement contrôlée. En corrigeant soigneusement la réfraction de la lumière par l’eau, en mettant en valeur la couleur du laser et en utilisant une calibration directe reliant les pixels aux positions réelles, le système peut extraire de manière fiable une trace bleue faible de scènes bruyantes et baignées de soleil. Bien que les performances diminuent dans des conditions extrêmement lumineuses et avec certaines couleurs d’objets, l’approche ouvre la voie à des scans plus routiniers et peu coûteux de récifs, de murs de port et de ruines submergées, aidant les scientifiques et les conservateurs à constituer des copies numériques fidèles des mondes sous-marins.
Citation: Garai, A., Kumar, S. 3D reconstruction of shallow sea structures using direct system calibration and faint laser line extraction. Sci Rep 16, 9321 (2026). https://doi.org/10.1038/s41598-025-25736-4
Mots-clés: scannage 3D sous-marin, reconstruction par ligne laser, cartographie des mers peu profondes, imagerie par nuage de points, archéologie sous-marine