Clear Sky Science · fr
Un ensemble de données multi-capteurs synchronisé dans le temps, acquis à partir de plusieurs radars et d’un récepteur RF
Pourquoi il est important de surveiller le ciel
Les drones sont rapidement passés de jouets et d’outils pour le cinéma à des machines essentielles pour la livraison, l’inspection, l’agriculture et bien d’autres usages. Mais ces mêmes petits aéronefs qui nous rendent service peuvent aussi être détournés pour l’espionnage, la contrebande ou même des attaques. Intercepter les drones dangereux est difficile car ils sont petits, rapides et évoluent souvent dans des scènes réelles encombrées. Cet article présente un nouveau jeu de données ouvert qui aide les chercheurs et les ingénieurs à concevoir des systèmes plus intelligents pour repérer, suivre et identifier les drones en utilisant leurs empreintes radio invisibles plutôt que seulement leur apparence ou leur son.
Écouter les drones avec des ondes invisibles
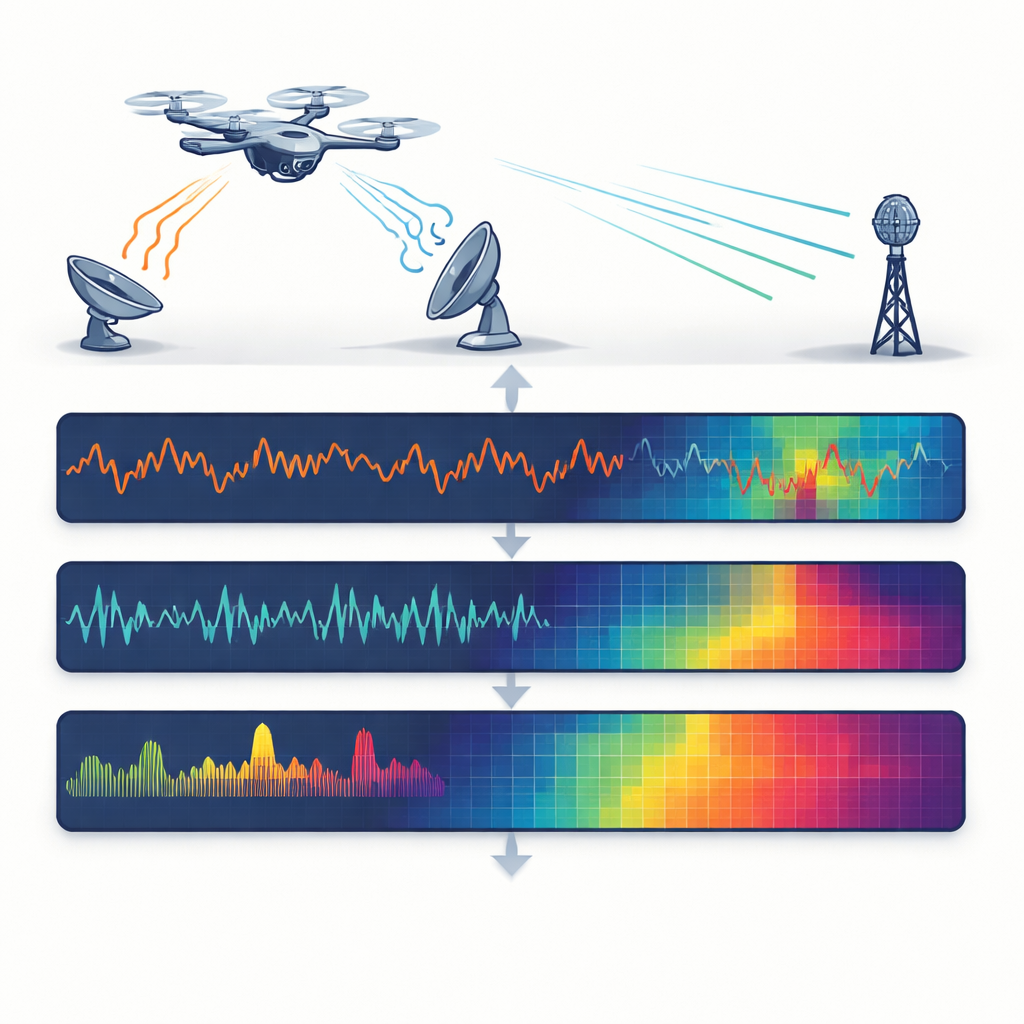
Plutôt que de s’appuyer sur des caméras ou des microphones, les chercheurs se focalisent sur les ondes radio, qui fonctionnent de jour comme de nuit et dans le brouillard, la pluie ou l’éblouissement. Ils utilisent simultanément trois capteurs radio différents : un radar émettant un ton continu pour détecter le mouvement, un autre radar balayant la fréquence pour mesurer à la fois la distance et la vitesse, et un récepteur radio qui écoute simplement les signaux de contrôle et de vidéo du drone. Chaque capteur « voit » le drone d’une manière différente — via les minuscules vibrations des pales en rotation, la variation de la distance au capteur, ou la structure du lien sans fil — un peu comme combiner la vue, l’ouïe et le toucher pour obtenir une image plus complète.

Construire une zone d’essai soigneusement contrôlée
Pour produire des données fiables, l’équipe a fait voler quatre drones commerciaux populaires et placé un simple réflecteur d’angle métallique comme référence non-drone dans un champ ouvert sans grands bâtiments. Toutes les cibles ont stationné à la même hauteur et se sont orientées vers un ensemble de capteurs montés ensemble sur des trépieds, de sorte que chaque appareil regardait la scène sous presque exactement le même angle. Les drones ont été mesurés à des distances de 2 à 30 mètres par pas de 2 mètres, avec 500 enregistrements répétés pour chaque combinaison de type de drone, de distance et de capteur. Cette conception rigoureuse permet d’étudier comment la détection évolue avec la portée et de comparer différents modèles qui varient en taille, poids et construction.
Faire respirer les différents capteurs à l’unisson
Une force clé de l’ensemble de données est que les trois capteurs sont synchronisés dans le temps par logiciel. Tous les dispositifs sont pilotés par un unique programme de contrôle qui les déclenche ensemble et enregistre leurs sorties de façon synchrone. Chaque enregistrement d’un capteur possède un pendant correspondant provenant des autres, aligné par un index partagé plutôt que par des horloges matérielles complexes. Pour les deux radars, le système capture soit des signaux bruts soit des cartes traitées montrant comment l’énergie réfléchie se répartit en distance et en vitesse. Pour le récepteur radio, il stocke le signal de communication brut. Cette synchronisation commune permet aux chercheurs de fusionner directement l’information entre capteurs — corréler, par exemple, un scintillement dû au mouvement des pales avec une rafale sur le lien de contrôle — sans avoir à réaligner les données par la suite.
Des ondes brutes à des images prêtes pour les machines
Parce que les outils modernes de détection reposent souvent sur l’apprentissage profond, les auteurs convertissent aussi les mesures brutes en vues de type image que les ordinateurs peuvent facilement ingérer. Pour le radar à ton continu, ils extraient les motifs de fréquence produits par les hélices en rotation, connus sous le nom de micro-mouvements, et les représentent sous forme de spectres simples. Pour le radar balayant, ils produisent des images distance–vitesse colorées qui mettent en évidence où et comment le drone se déplace, après avoir éliminé le bruit de fond. Pour le récepteur radio, ils calculent la répartition de la puissance à travers les fréquences, créant ainsi des empreintes caractéristiques du style de communication de chaque drone. Chaque fichier brut possède un fichier image correspondant, de sorte que les chercheurs peuvent choisir de travailler au niveau du signal ou d’alimenter directement des réseaux neuronaux standard basés sur des images.
Montrer qu’avoir plusieurs yeux vaut mieux qu’un seul
Pour démontrer que le jeu de données n’est pas seulement intéressant mais utile, l’équipe entraîne un réseau de reconnaissance d’images bien connu séparément sur les images de chaque capteur, puis sur des combinaisons fusionnées des trois. Comme prévu, les radars peinent davantage à mesure que le drone s’éloigne : les signaux réfléchis s’affaiblissent et la précision de classification baisse avec la distance. Le récepteur radio se comporte mieux en portée, mais certains drones partagent des bandes de communication presque identiques et sont difficiles à distinguer avec ce seul capteur. Lorsque les chercheurs fusionnent les trois vues en entrées composites uniques, les performances s’améliorent globalement, en particulier pour les drones plus petits et plus difficiles à détecter. Cela démontre que l’information multi-capteur synchronisée peut compenser les angles morts d’un dispositif pris isolément.
Ce que cela signifie pour un espace aérien plus sûr
En termes simples, les auteurs ont construit un « terrain d’entraînement » public et détaillé où des algorithmes intelligents peuvent apprendre à reconnaître les drones en utilisant plusieurs « yeux » radio à la fois. En publiant à la fois les signaux bruts et les images prêtes à l’emploi, accompagnés d’exemples de code, ils abaissent la barrière pour que d’autres conçoivent des systèmes de détection fiables dans des conditions changeantes et à différentes distances. Avec le temps, les outils fondés sur cet ensemble de données pourraient aider les aéroports, les installations critiques et les autorités municipales à mieux distinguer les drones amicaux des drones suspects, rendant l’espace aérien de basse altitude plus sûr sans dépendre uniquement des caméras ou des observateurs humains.
Citation: Han, SK., Jung, YH. A Time-Synchronized Multi-Sensor drone dataset acquired from multiple radars and RF receiver. Sci Data 13, 407 (2026). https://doi.org/10.1038/s41597-026-06802-6
Mots-clés: détection de drones, détection radar, signaux radiofréquence, fusion de capteurs, jeu de données ouvert