Clear Sky Science · fr
Un ensemble de données de référence ouvert pour l’apprentissage automatique et l’optimisation intelligente de trajectoires dans les systèmes aériens sans pilote à voilure fixe
Pourquoi des vols de drone plus intelligents comptent
Des relevés agricoles aux opérations de recherche et sauvetage, les drones à voilure fixe accomplissent discrètement une part croissante des missions qui se déroulent au‑dessus de nos têtes. Rendre ces appareils plus fiables et moins dépendants des pilotes humains pourrait débloquer des livraisons plus sûres, un suivi environnemental plus précis et des opérations plus résilientes en cas d’urgence ou de conflit. Mais le progrès est de plus en plus freiné non par le manque d’idées ingénieuses, mais par l’absence de données réelles. Cet article présente un nouveau jeu de données ouvert comprenant des centaines de vols autonomes, conçu pour que des ingénieurs et des étudiants partout puissent développer et tester des algorithmes de vol plus intelligents sur une même base riche et partagée.
Un laboratoire volant pour des missions réelles
Les auteurs ont construit leur jeu de données en utilisant un avion robuste de type planeur moteur, le Volantex Ranger 2400. Avec son envergure de deux mètres et demi, sa forme d’aile efficiente et son fuselage spacieux, l’appareil peut embarquer de l’électronique moderne tout en restant en vol pour des missions longues et stables. Il est propulsé par un moteur électrique monté à l’arrière et une batterie lithium‑ion personnalisée, optimisée pour l’endurance plutôt que pour des pointes de puissance. L’équipe a piloté cette plateforme en mode pleinement autonome, en utilisant des trajectoires préplanifiées couvrant les phases clés du vol : décollage, segments en ligne droite, virages serrés, manœuvres dynamiques et atterrissages automatiques. Ce dispositif contrôlé mais réaliste transforme le Ranger en un laboratoire volant qui se comporte comme de petits drones opérationnels utilisés dans des contextes civils et de défense.
Deux cerveaux, un même avion
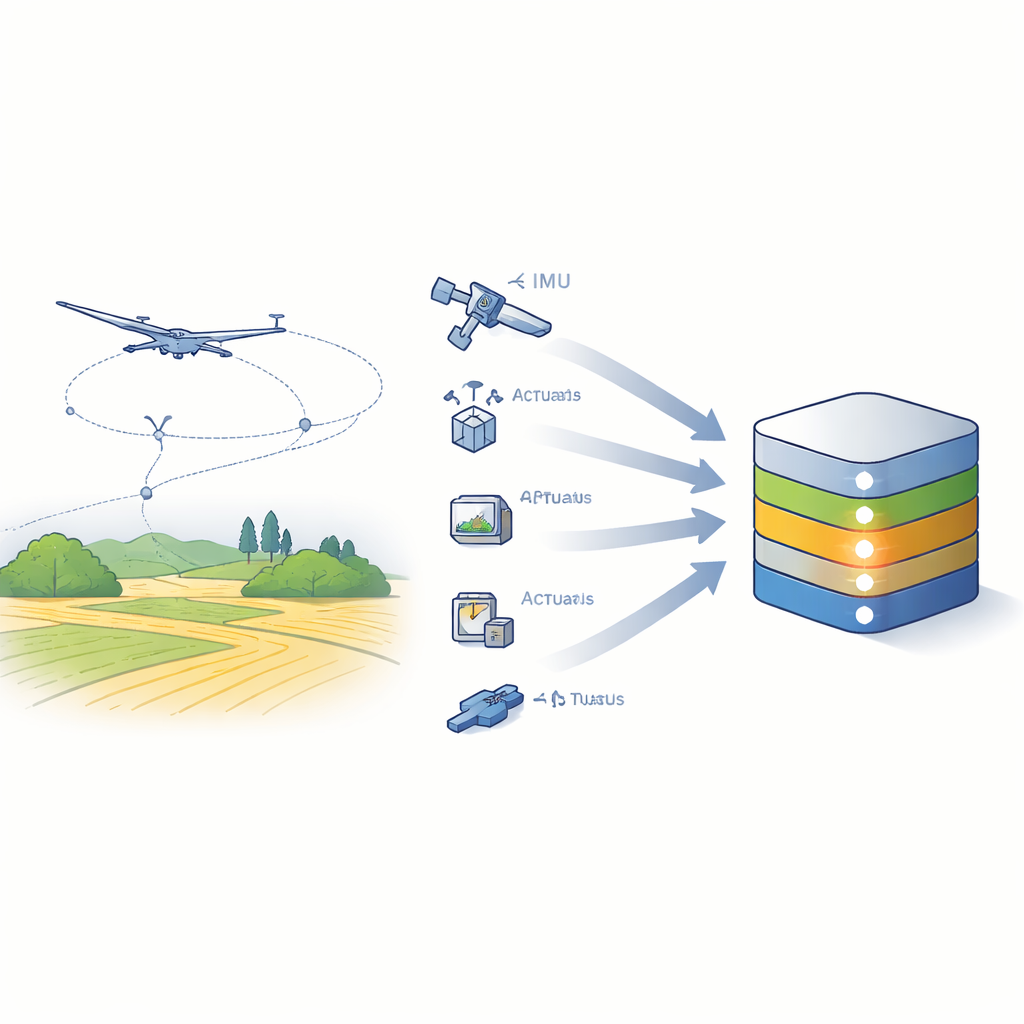
Pour couvrir un large éventail de cas d’usage, les chercheurs ont équipé le même cellule de deux « cerveaux » très différents. Une configuration utilise un contrôleur de vol compact et peu coûteux SpeedyBee F405, proche de l’électronique que des amateurs pourraient installer sur un drone construit maison. L’autre combine un pilote automatique professionnel Pixhawk 6X avec un puissant ordinateur Jetson Orin NX, capable d’exécuter des logiciels d’intelligence artificielle exigeants à bord. Les deux systèmes enregistrent une télémétrie détaillée, incluant les mouvements issus des capteurs inertiels, la position GPS et la vitesse, l’altitude, la vitesse air, les consignes aux surfaces de contrôle, l’état de la batterie et le mode de vol, à des taux suffisants pour reconstruire le mouvement de l’avion avec précision. En conservant la cellule identique tout en échangeant l’électronique, le jeu de données permet aux chercheurs d’étudier comment différents niveaux de calcul et de détection embarqués influencent le comportement de vol.
Ce que contient le jeu de données
La collection résultante IDF‑DS comprend 240 vols autonomes, environ 32 heures de temps de vol et des dizaines de millions d’échantillons enregistrés. Chaque vol est stocké selon une structure de dossiers cohérente afin que les utilisateurs puissent rapidement trouver le journal principal, le plan de mission, les réglages du contrôleur et une trace GPS prête à l’affichage. Une famille de missions suit un motif en zigzag au‑dessus d’un champ rectangulaire, idéal pour des comparaisons reproductibles ou l’entraînement de modèles prédictifs. Une autre reproduit une boucle de type circuit de course inspirée d’un célèbre tracé MotoGP, introduisant des virages serrés, des courbes larges et des segments droits qui mettent l’autopilote au défi. Pour chaque configuration et mission, les journaux capturent la façon dont l’appareil a réellement volé, pas seulement la trajectoire prévue.
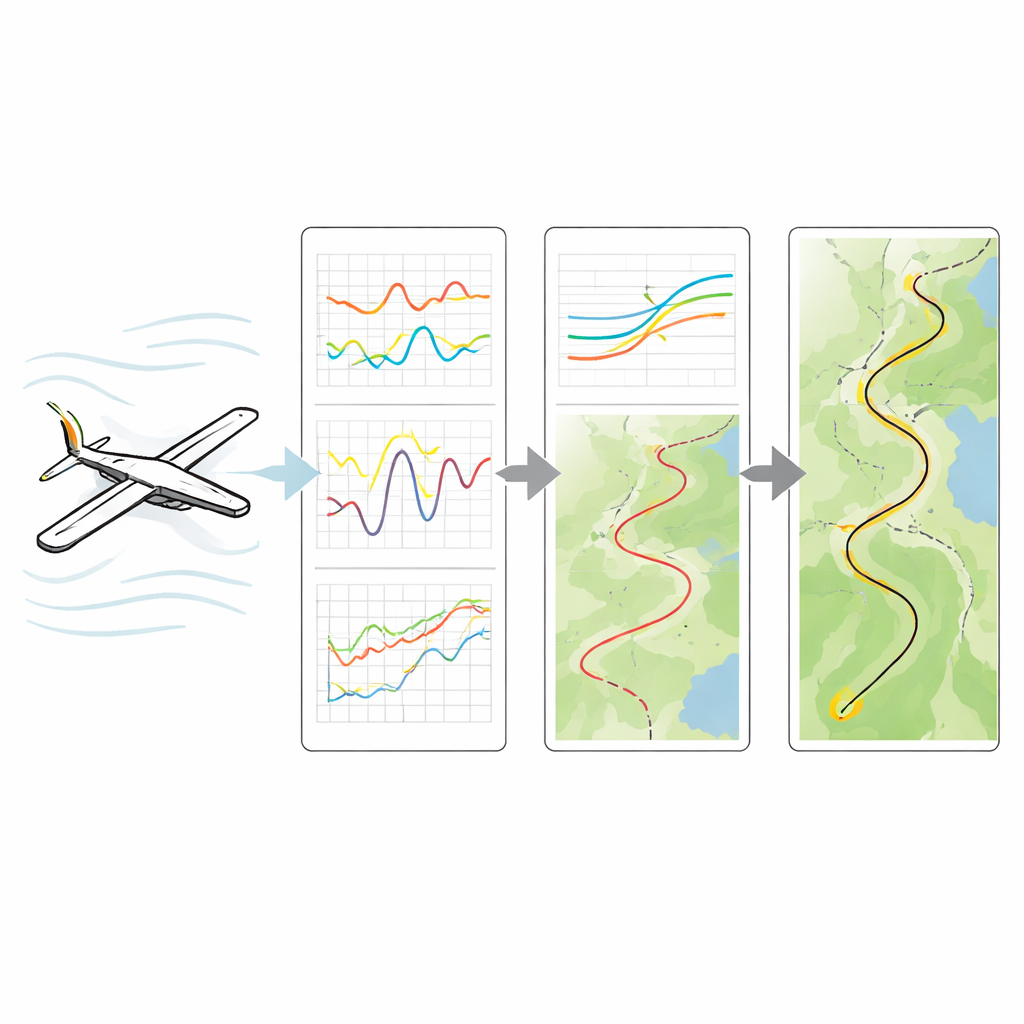
Transformer des vols bruts en connaissances
Pour illustrer ce qu’on peut faire avec ce trésor, les auteurs détaillent plusieurs analyses exemples. Ils vérifient la qualité des capteurs de mouvement embarqués en les comparant aux accélérations et rotations déduites de la trajectoire basée sur GPS, confirmant que les mesures sont suffisamment fiables pour servir de « vérité terrain » lors de l’entraînement de modèles. Ils étudient la précision des estimations de vitesse de l’autopilote selon trois axes, la fidélité du suivi de la trajectoire planifiée et la consommation électrique pendant les montées, les virages et le vol en palier. En combinant la vitesse air, la vitesse sol et l’assiette, ils reconstruisent même le vent ressenti par l’appareil le long de sa route, dessinant un portrait des rafales et des vents traversiers uniquement à partir de mesures embarquées. Un autre cas d’usage décrit comment ces mêmes flux de données pourraient entraîner un modèle d’intelligence artificielle à estimer la position lorsque la navigation par satellite est indisponible.
En quoi cette ressource aide les vols futurs
Concrètement, ce travail vise à fournir à la communauté une « boîte noire » partagée issue de centaines de vols que n’importe qui peut ouvrir. Plutôt que chaque équipe doive collecter ses propres données de test coûteuses — et les conserver privées — chercheurs et étudiants peuvent télécharger ce jeu de données ouvert et commencer immédiatement à explorer de nouvelles façons de maintenir les drones sur leur trajectoire quand le GPS fait défaut, détecter des défaillances avant qu’elles ne deviennent dangereuses ou prolonger l’autonomie en choisissant des trajectoires plus efficaces. L’article lui‑même ne construit pas ces systèmes intelligents ; il construit la fondation dont ils ont besoin. Pour le lecteur, l’enseignement est que le progrès en autonomie aérienne dépend autant de l’existence de relevés de vol ouverts et soigneusement documentés que d’algorithmes ingénieux — et ce jeu de données constitue une avancée significative vers ce futur.
Citation: García-Gascón, C., Bas-Bolufer, J., Castelló-Pedrero, P. et al. An open benchmark dataset for machine learning and intelligent trajectory optimization in fixed-wing unmanned aerial systems. Sci Data 13, 364 (2026). https://doi.org/10.1038/s41597-026-06716-3
Mots-clés: drones à voilure fixe, télémétrie de vol, navigation autonome, jeu de données pour apprentissage automatique, optimisation de trajectoire