Clear Sky Science · fr
SPICE-HL3 : jeu de données photon unique, inertiel et stéréoscopique pour l’exploration des paysages lunaires en haute latitude
Pourquoi les ombres lunaires comptent pour les robots
Les missions futures dans les régions polaires de la Lune visent à exploiter l’eau gelée et d’autres ressources, mais ces zones font aussi partie des environnements visuels les plus déroutants du Système solaire. De longues ombres mouvantes, des éblouissements intenses et une obscurité quasi totale peuvent facilement tromper les caméras d’un robot. Cet article présente SPICE‑HL3, un nouveau jeu de données ouvert créé dans un « morceau de Lune » intérieur qui permet aux chercheurs du monde entier de tester la perception et la navigation robotique dans ces conditions polaires difficiles, y compris avec une caméra à photon unique de pointe capable, littéralement, de voir dans l’obscurité.
Construire un morceau des pôles lunaires sur Terre
Comme les données réelles des pôles lunaires sont rares et coûteuses à obtenir, l’équipe a construit un banc d’essai contrôlé nommé LunaLab à l’Université du Luxembourg. Il s’agit d’un paysage intérieur de 11 par 8 mètres rempli de gravier basaltique grossier, de rochers et de cratères, entouré de murs et d’un plafond noirs pour imiter l’environnement lunaire absorbant la lumière et dépourvu d’air. Un projecteur puissant et mobile imite le Soleil très bas à l’horizon, produisant de longues ombres nettes et d’énormes différences de luminosité entre les pentes ensoleillées et l’intérieur des cratères plongé dans l’obscurité totale. En modifiant la position et l’intensité de la lampe, les chercheurs ont recréé quatre régimes d’éclairage distincts — référence, midi, aube/crépuscule et nuit — similaires à ce qu’un rover expérimenterait au cours d’un jour lunaire près des pôles. 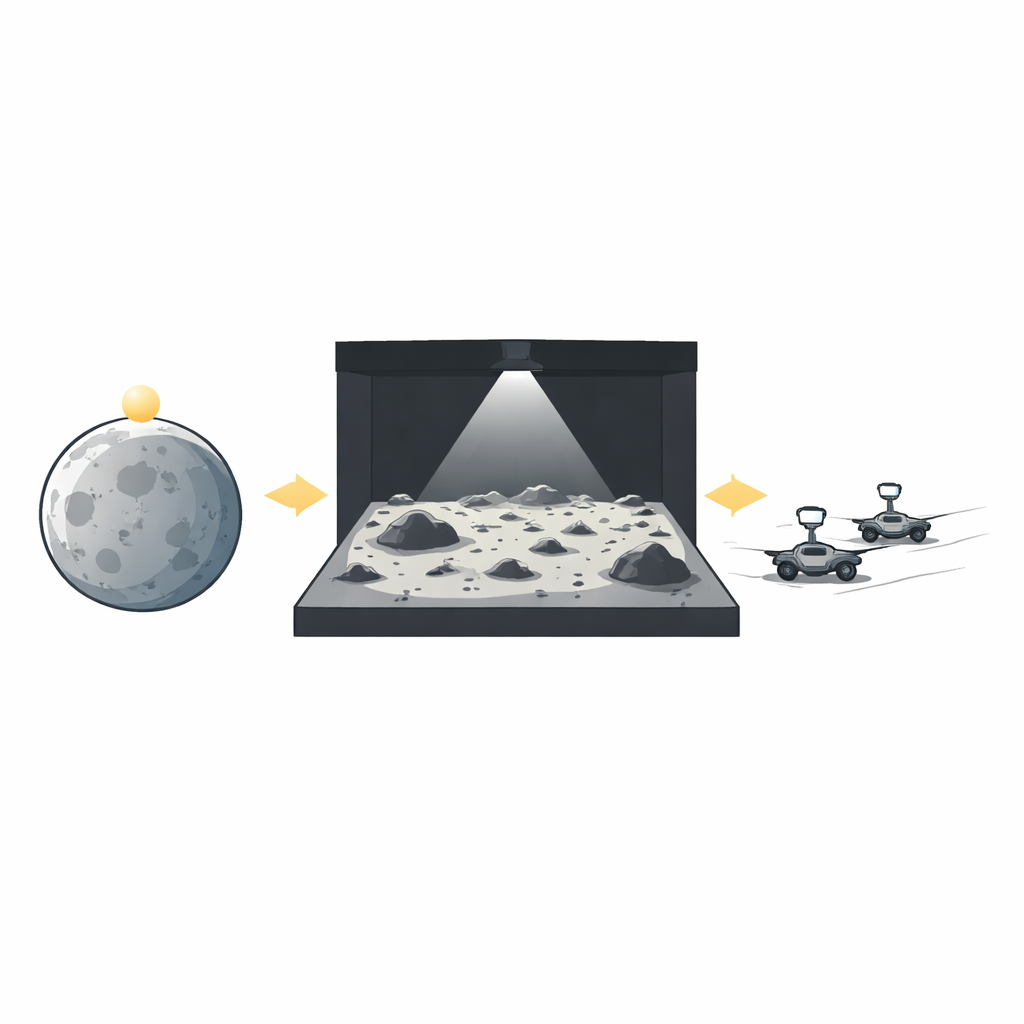
Rovers, capteurs et une caméra qui compte les photons
Le jeu de données a été collecté à l’aide de deux petits rovers à roues qui transportaient différentes combinaisons de caméras et de capteurs de mouvement. Un rover embarquait une caméra monochrome conventionnelle et une nouvelle caméra à diode avalanche à photon unique (SPAD) ; l’autre portait une caméra stéréo couleur-plus-profondeur avec un capteur de mouvement intégré. Les deux rovers ont enregistré la rotation des roues et les données inertiales, tandis qu’un système de capture de mouvement aérien suivait leurs positions réelles avec une précision submillimétrique. La caméra SPAD est la technologie la plus remarquable : au lieu de mesurer la lumière comme une valeur d’intensité continue, chaque pixel indique s’il a détecté des photons individuels, avec une vitesse et une sensibilité extrêmement élevées. En combinant de nombreuses de ces captures binaires ultra‑rapides, le système peut reconstruire des images conservant des détails même dans des scènes très peu éclairées ou à contraste extrême où les caméras classiques ont tendance à flouter ou à saturer.
Capturer des trajets lunaires en plusieurs variantes
Pour offrir aux chercheurs un terrain d’essai riche, les auteurs ont conçu sept types de trajectoires pour les rovers, allant de longues traversées avec arrêts et reprises imitant une conduite prudente planétaire à de courtes courses continues dans différentes directions par rapport au Soleil artificiel (vers lui, à l’opposé et en travers) ainsi que des rotations serrées sur place. Ils ont répété ces parcours à des vitesses lentes équivalentes à la marche et à des vitesses dix fois supérieures, sous plusieurs conditions d’éclairage, parfois avec les phares des rovers allumés et parfois éteints. Au total, SPICE‑HL3 contient 88 séquences synchronisées dans le temps, près de 1,3 million d’images et des données de mouvement et de vérité terrain correspondantes. Les images couvrent des scènes statiques idéales pour une analyse approfondie et des séquences rapides qui mettent à l’épreuve le flou de mouvement et le contrôle d’exposition. Le tout est organisé dans une structure de fichiers claire, avec des fichiers d’étalonnage décrivant exactement l’orientation de chaque caméra et capteur et la synchronisation de leurs horloges.
Mettre la vision à photon unique à l’épreuve
Au‑delà de la simple publication des données, l’équipe a contrôlé la qualité et l’utilité des images enregistrées. Ils ont comparé la façon dont la SPAD, la caméra monochrome et la caméra stéréo géraient certaines des situations visuelles les plus difficiles : trajets au crépuscule et de nuit, et parcours où le rover faisait face directement au « Soleil ». À l’aide de mesures simples de qualité d’image et d’inspection visuelle, ils ont constaté que la caméra à photon unique préservait systématiquement la structure dans les régions claires et ombrées, maintenait une large plage de niveaux de luminosité et restait stable dans une variété de conditions. Les caméras conventionnelles se comportaient bien lorsque la scène était bien éclairée, mais perdaient des détails dans les zones très sombres ou surexposaient les hautes lumières proches de la source. Les auteurs ont également vérifié que les logiciels courants de cartographie et de localisation pouvaient traiter le jeu de données, confirmant que les horodatages, les calibrations et les formats sont suffisamment robustes pour la recherche robotique réelle. 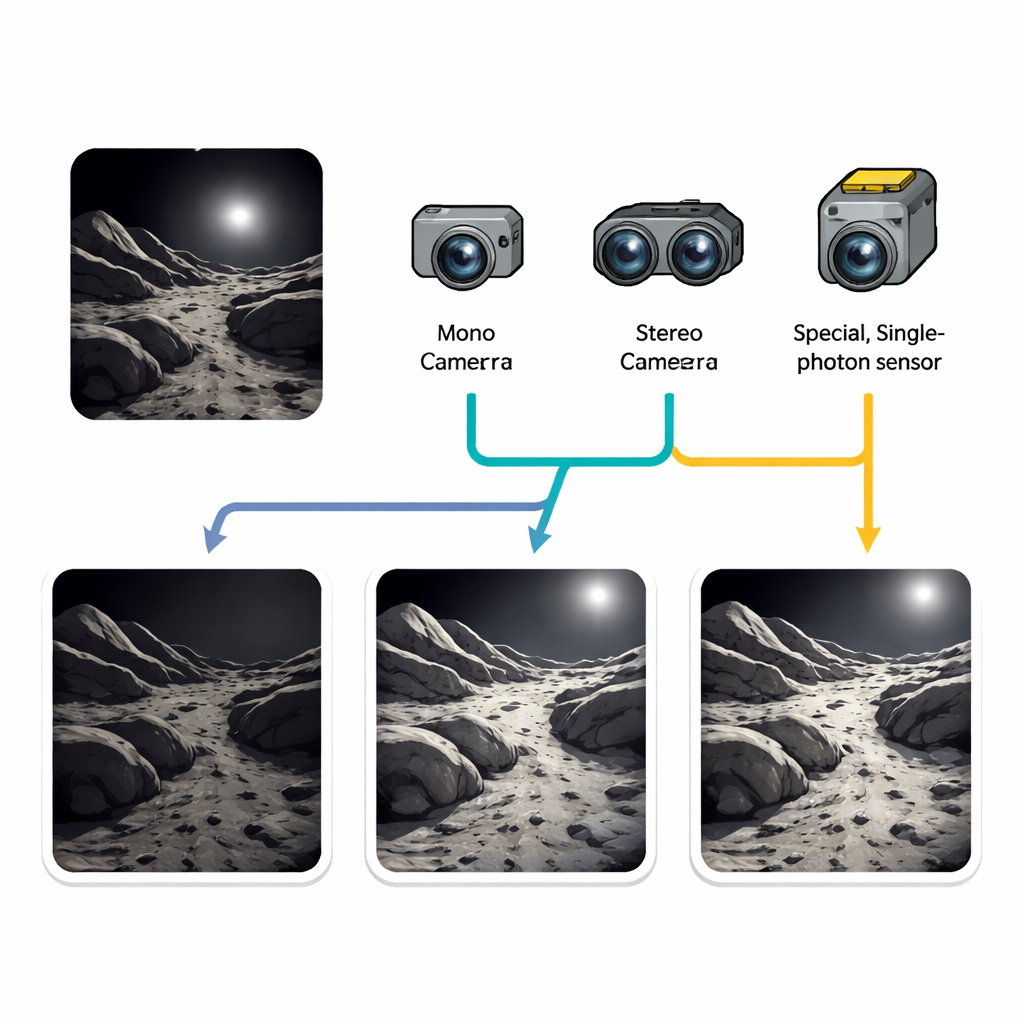
Limites, mises en garde et pourquoi cela importe
Bien que LunaLab ne reproduise pas parfaitement les fines particules de poussière et les effets subtils de diffusion de la lumière du vrai régolithe lunaire, et qu’un léger halo infrarouge non souhaité du système de capture de mouvement se soit infiltré dans les scènes les plus sombres, les auteurs soutiennent que SPICE‑HL3 représente néanmoins un environnement optique exigeant de « pire cas » pour la vision des rovers. Pour les ingénieurs et scientifiques préparant des missions aux pôles lunaires — ou concevant des robots pour tout environnement sombre et à fort contraste — le jeu de données offre une référence publique rare. Il permet de comparer équitablement les nouvelles technologies de caméras comme les capteurs SPAD aux systèmes traditionnels, d’améliorer les algorithmes de navigation et de cartographie, et ultimement d’aider à garantir que les futurs rovers pourront continuer à se déplacer en toute sécurité à travers les ombres changeantes de la Lune au lieu de rester bloqués dans l’obscurité.
Citation: Rodríguez-Martínez, D., van der Meer, D., Song, J. et al. SPICE-HL3: Single-Photon, Inertial, and Stereo Camera dataset for Exploration of High-Latitude Lunar Landscapes. Sci Data 13, 374 (2026). https://doi.org/10.1038/s41597-026-06668-8
Mots-clés: robotique lunaire, navigation planétaire, imagerie à photon unique, ensembles de données pour vision robotique, éclairage extrême