Clear Sky Science · fr
Fabrication in situ évolutive d’une peau électronique multimodale pour la robotique intelligente et les systèmes interactifs
Donner aux robots et aux jouets un sens du toucher
Imaginez un robot capable de saisir délicatement une tranche de pain grillé brûlante sans l’écraser ni brûler votre main, ou un jouet qui réagit différemment lorsque vous le serrez dans vos bras, pliez son oreille ou le réchauffez avec la paume. Cette recherche décrit un nouveau type de « peau électronique » rapprochant ces idées de la réalité en dotant les machines d’un sens du toucher et de l’environnement proche plus riche et plus humain.
Pourquoi les machines ont besoin d’un meilleur toucher
Les robots et appareils d’aujourd’hui restent maladroits face au monde réel. Beaucoup ne détectent qu’un seul paramètre, comme la pression, et reposent souvent sur des composants volumineux assemblés manuellement, difficiles à industrialiser. Or la peau humaine combine en permanence de nombreux signaux : contact léger, pression ferme, étirement, chaleur, et même la perception d’objets proches avant le contact. Les auteurs de cette étude ont voulu concevoir une version électronique de la peau capable de capter simultanément plusieurs de ces sensations, tout en restant fine, flexible et facile à personnaliser selon les tâches.
Construire un sens du toucher fin et flexible
L’équipe a créé une « e-skin » à faible profil en utilisant un procédé sans salle blanche, évolutif et rapidement adaptable. Au cœur se trouve un circuit en cuivre flexible gravé par laser ultraviolet, qui joue le rôle du câblage d’un circuit imprimé tout en pouvant se plier et épouser des courbes. Au-dessus et en dessous de ce circuit, ils ont ajouté une couche souple de silicone riche en minuscules pores d’air, semblable à une éponge. Les surfaces extérieures sont recouvertes d’un film mince de nanotubes de carbone, formant une enveloppe conductrice qui protège l’appareil des perturbations électriques et sert de couche de référence commune pour la détection. Cet empilement permet à chaque pastille de capteur de se comporter comme un petit condensateur dont la valeur varie lorsque le matériau est pressé, plié, chauffé ou approché d’un objet. De petits circuits supplémentaires montés sur le même circuit flexible mesurent la température et la distance sans contact, de sorte que la feuille imite non seulement les récepteurs de pression et d’étirement de la peau, mais aussi la sensation de chaleur et une « vision » proche. 
Comment les capteurs ressentent la pression et le mouvement
Les éléments de pression et de flexion de l’e-skin sont conçus pour réagir fortement à de faibles variations tout en restant durables. Lorsqu’une pression s’exerce, les pores de la couche souple se compressent, rapprochant les couches métalliques internes et remplaçant l’air par davantage de silicone. Ces deux effets augmentent le signal électrique, en particulier aux faibles pressions où le matériau est le plus facile à comprimer. Les essais ont montré que l’e-skin peut détecter des touches très légères, de l’ordre de quelques dizaines de pascals, avec une réponse rapide et peu de dérive même après dix mille cycles de pression-relâchement. Lorsqu’une feuille se plie, elle se replie autour des conducteurs internes, réduisant à nouveau l’écart entre les couches d’un côté et amplifiant le signal. La réponse s’accentue aux grands angles de pli, conformément au fait que les plis du monde réel se localisent souvent plutôt que de se répartir uniformément. Dans l’ensemble, la conception équilibre douceur, stabilité et sensibilité sans recourir aux structures empilées complexes employées dans de nombreux dispositifs antérieurs. 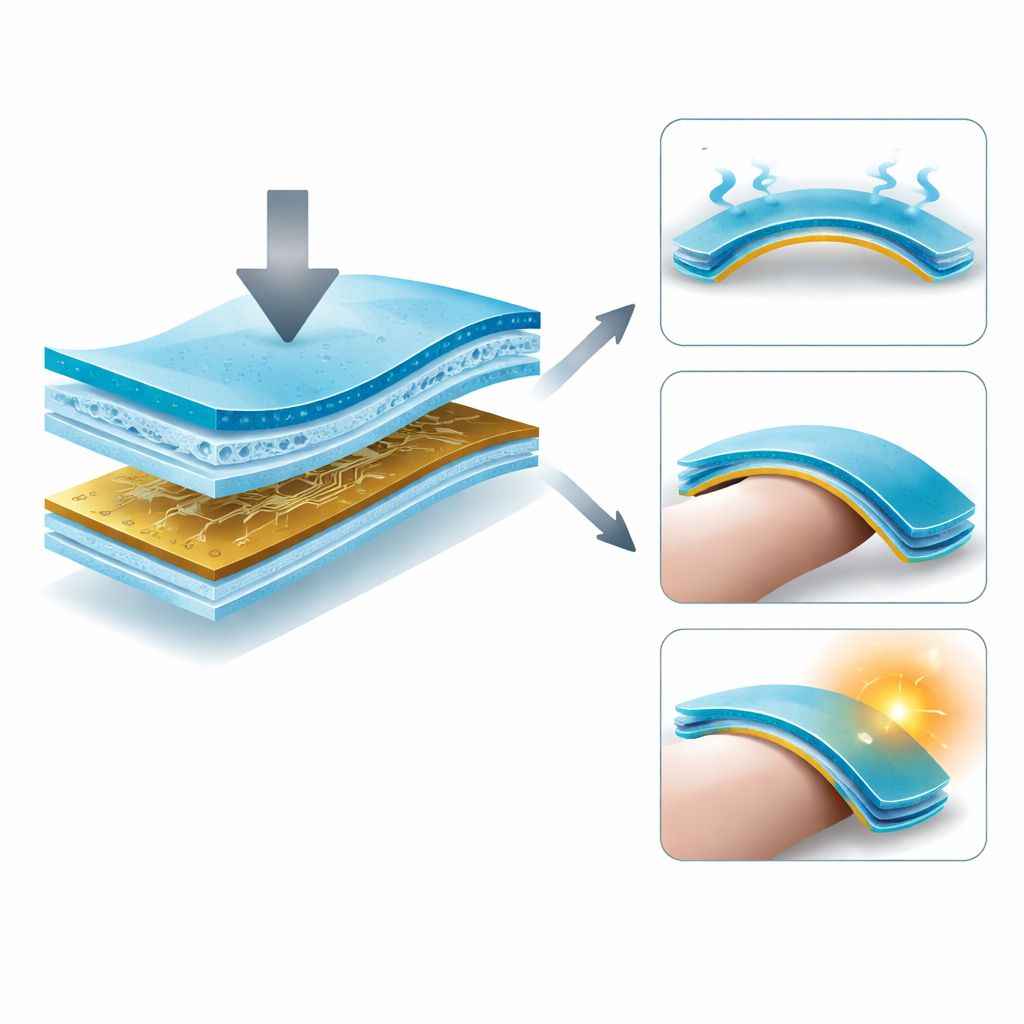
Des robots de cuisine aux compagnons ludiques
Pour illustrer les capacités de cette e-skin, les chercheurs l’ont enroulée autour d’un préhenseur robotique et donné au robot une tâche de type culinaire. Alors que le préhenseur se rapproche d’un morceau de pain chaud, un petit module de mesure de profondeur intégré dans la peau cartographie d’abord la distance à l’objet, aidant le robot à aligner ses doigts avant le contact. Une fois en contact, les capteurs de pression et de flexion indiquent la force d’écrasement à appliquer, évitant glissements ou écrasement du pain. Un capteur de température sur la même feuille vérifie quand le pain a suffisamment refroidi pour être transmis sans danger à une personne. Dans un autre exemple, l’équipe a fabriqué un jouet éléphant souple recouvert d’e-skin. Presser sa poitrine modifie le rythme d’un moteur vibrant caché pour donner l’impression d’un battement de cœur, plier une oreille déclenche un son, et la chaleur d’une main peut illuminer les joues du jouet, transformant le toucher en interaction ludique et émotionnelle.
Voir des motifs de pression sur une surface
Au-delà des points individuels, la même méthode de fabrication permet de réaliser de larges matrices de détection de pression qui lisent où et avec quelle intensité une surface est touchée. Les chercheurs ont démontré une grille de 8 par 15 qui fonctionne comme une caméra de pression : quand des doigts, des poids ou des formes estampées appuient, le système reconstruit le motif de forces et identifie même des contours comme des lettres. Cette capacité à capturer des cartes de pression et des centres de masse pourrait aider les robots à équilibrer des charges, reconnaître des objets ou servir de plateformes de pesage intelligentes et de surfaces interactives. Parce que le procédé sous-jacent est rapide et modulaire, les concepteurs peuvent ajuster la taille, l’espacement et la souplesse des pixels de détection pour différentes applications, du mobilier intelligent aux tapis de surveillance de posture.
Ce que cela signifie pour la technologie de tous les jours
En combinant plusieurs modes de détection — pression, flexion, chaleur et proximité — dans une seule feuille fine et facilement personnalisable, ce travail rapproche la peau électronique des capacités subtiles de la peau humaine. S’il reste des marges d’amélioration pour les très hautes pressions et pour automatiser certaines étapes d’assemblage, l’approche montre déjà qu’un toucher riche peut être ajouté aux robots, jouets et autres dispositifs sans matériel lourd ou assemblage artisanal. Concrètement, cela pourrait déboucher sur des robots domestiques manipulant des objets fragiles en toute sécurité, des dispositifs médicaux portables suivant le contact corporel avec plus de confort, et des produits interactifs qui répondent à notre toucher de façon beaucoup plus naturelle.
Citation: Lim, H., Choi, J., Han, C. et al. Scalable in-situ fabrication of multimodal electronic skin for intelligent robotics and interactive systems. npj Flex Electron 10, 34 (2026). https://doi.org/10.1038/s41528-026-00538-4
Mots-clés: peau électronique, détection tactile, capteurs flexibles, préenseur robotique, dispositifs interactifs