Clear Sky Science · fr
Actionneur biomimétique fabriqué à partir d’un nanocomposite polymère ferroélectrique relaxor
Petits robots qui se déplacent comme de vrais insectes
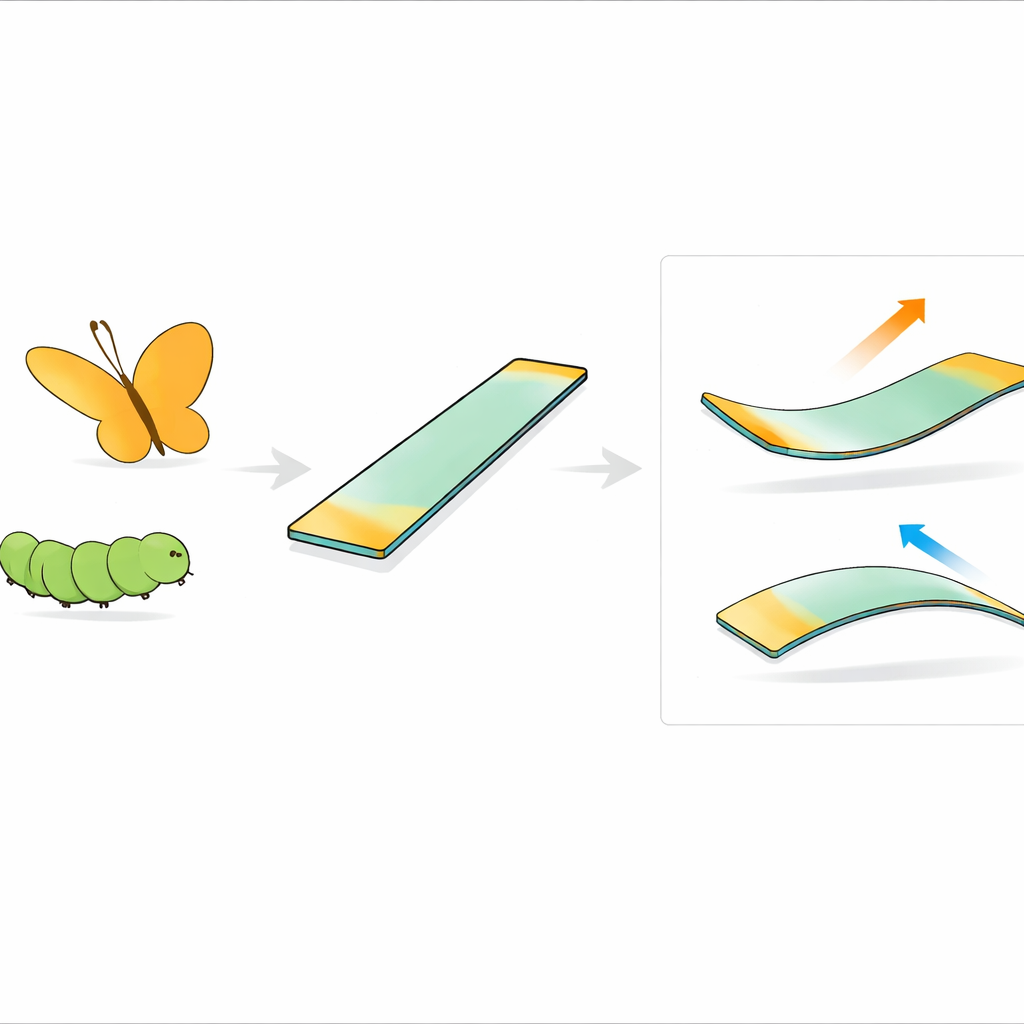
Imaginez un robot de la taille d’une chenille capable de ramper sur un terrain accidenté, ou un dispositif semblable à un papillon qui bat des ailes et s’élève du sol — et qui est pourtant constitué d’une seule feuille de plastique aussi fine que du papier et consomme moins d’énergie qu’une veilleuse LED. Cet article décrit un nouveau type de matériau souple pouvant jouer le rôle de muscle artificiel, rendant ces robots à l’échelle des insectes plus simples, plus légers et plus économes en énergie qu’auparavant.
Pourquoi les machines petites et souples comptent
Des robots miniatures inspirés des insectes pourraient se faufiler dans des bâtiments effondrés pour chercher des survivants, s’insinuer dans des conduites pour inspecter des infrastructures, ou surveiller discrètement des cultures et des forêts. Pour fonctionner dans ces espaces exigus et imprévisibles, ils doivent être minuscules, flexibles et résistants, tout en consommant très peu d’énergie. Beaucoup de conceptions actuelles reposent sur des assemblages complexes d’engrenages, de charnières et de matériaux multiples, ce qui ajoute du poids, gaspille de l’énergie et rend difficile toute miniaturisation supplémentaire. Les auteurs soutiennent que la solution idéale est un matériau unique capable à la fois de générer un mouvement et de le transmettre directement, à l’instar du muscle réel chez les animaux.
Un plastique intelligent conçu de l’intérieur
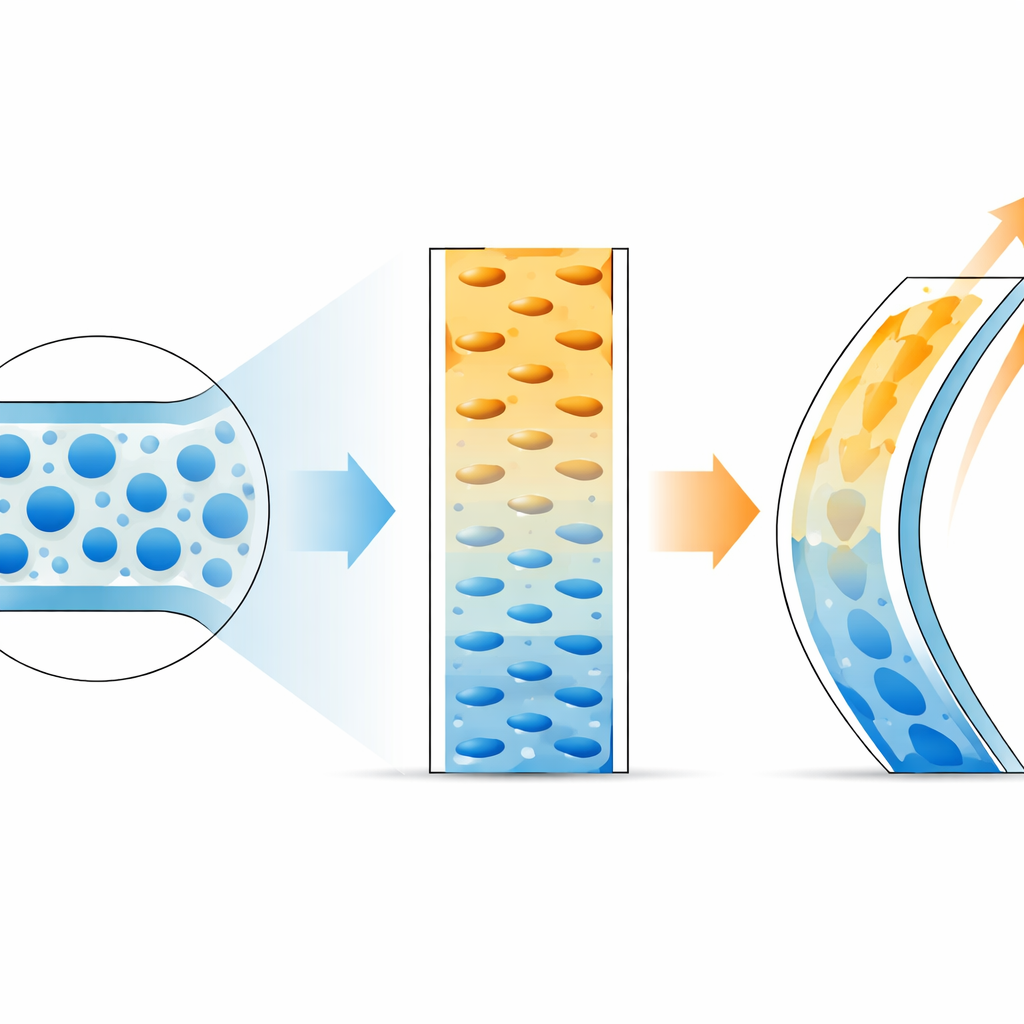
Au cœur de ce travail se trouve une fine pellicule plastique basée sur une famille de matériaux bien connue, le PVDF, déjà appréciée pour sa capacité à se déformer sous champ électrique. Les chercheurs mélangent ce plastique avec de minuscules « points polymères », des particules à l’échelle nanométrique couvertes de groupes chimiques pouvant former des liaisons hydrogène. Lorsque le mélange est coulé en film et chauffé doucement de manière contrôlée, le solvant s’évapore plus rapidement en surface qu’à la base. Ce séchage inégal, associé aux liaisons hydrogène, encourage les chaînes de plastique près de la surface inférieure à s’aligner dans une disposition polaire très ordonnée, tandis que la face supérieure reste moins ordonnée. Le résultat est un gradient interne incorporé à travers l’épaisseur d’une seule couche.
De la structure cachée à un mouvement puissant
Ce gradient structurel subtil apporte un grand avantage mécanique. Lorsqu’un champ électrique est appliqué à travers le film, la région inférieure, plus ordonnée et fortement polarisée, réagit davantage que la partie supérieure, de sorte qu’un côté de la feuille se dilate plus que l’autre. Ce déséquilibre fait plier la bande entière, à l’image d’une lamelle bimétallique classique dans un thermostat, mais ici cela se produit dans un film organique et flexible de seulement quelques dizaines de micromètres d’épaisseur. Des mesures précises montrent que le film peut changer de longueur d’environ 14 % et stocker des densités d’énergie mécanique proches de celles d’actionneurs céramiques durs — tout en restant souple et léger. Par rapport à un film par ailleurs identique sans points polymères ni traitement générant le gradient, le nouveau matériau produit plusieurs fois plus de déformation et convertit l’énergie électrique en mouvement bien plus efficacement.
Construire une chenille qui rampe et un papillon qui vole
Pour montrer ce que ce matériau peut accomplir en pratique, l’équipe découpe le film en formes inspirées d’insectes et ajoute de simples électrodes à base de carbone ainsi que des supports en cuivre fins. Une conception ressemble à une petite chenille avec un milieu plus large et des extrémités effilées ; lorsque l’on applique un champ électrique alternatif, la bande se courbe selon un motif rythmique et rampe le long d’une piste striée à des vitesses de plusieurs longueurs de corps par seconde, en n’utilisant que quelques milliwatts de puissance. Une seconde conception imite un papillon, avec une région centrale active et des ailes flexibles. Animées par des signaux électriques similaires, les ailes battent rapidement et peuvent soulever l’appareil de quelques millimètres au-dessus d’une plate-forme, portant même des charges jusqu’à vingt fois son propre poids — le tout avec une masse totale d’actionneur d’environ 50 milligrammes.
Ce que cela signifie pour les futurs micro‑robots
Cette étude montre qu’en ingénierie soignée de l’organisation d’un matériau plastique d’un côté à l’autre, il est possible de créer une seule feuille ultra‑fine qui se plie fortement sous champ électrique et peut alimenter des mouvements complexes et réalistes. Bien que les dispositifs actuels exigent encore des tensions relativement élevées, leur consommation d’énergie extrêmement faible et leur construction ultralégère en font des éléments prometteurs pour de futurs robots et dispositifs intelligents à l’échelle des insectes. Avec des raffinements supplémentaires visant à réduire la tension d’utilisation, des films similaires pourraient un jour permettre des essaims de petites machines autonomes qui rampent, battent des ailes et explorent le monde à l’aide de muscles artificiels d’une épaisseur d’un cheveu.
Citation: Chi, H., Bai, P., Zhou, Z. et al. Biomimetic actuator crafted from a relaxor ferroelectric polymer nanocomposite. Nat Commun 17, 2155 (2026). https://doi.org/10.1038/s41467-026-70165-0
Mots-clés: robotique souple, muscles artificiels, actionneurs polymères, robots à l’échelle des insectes, matériaux électroactifs