Clear Sky Science · fr
Décoder les mouvements du membre fantôme à partir d'enregistrements intraneuronaux
Nouvelles façons de bouger avec une jambe manquante
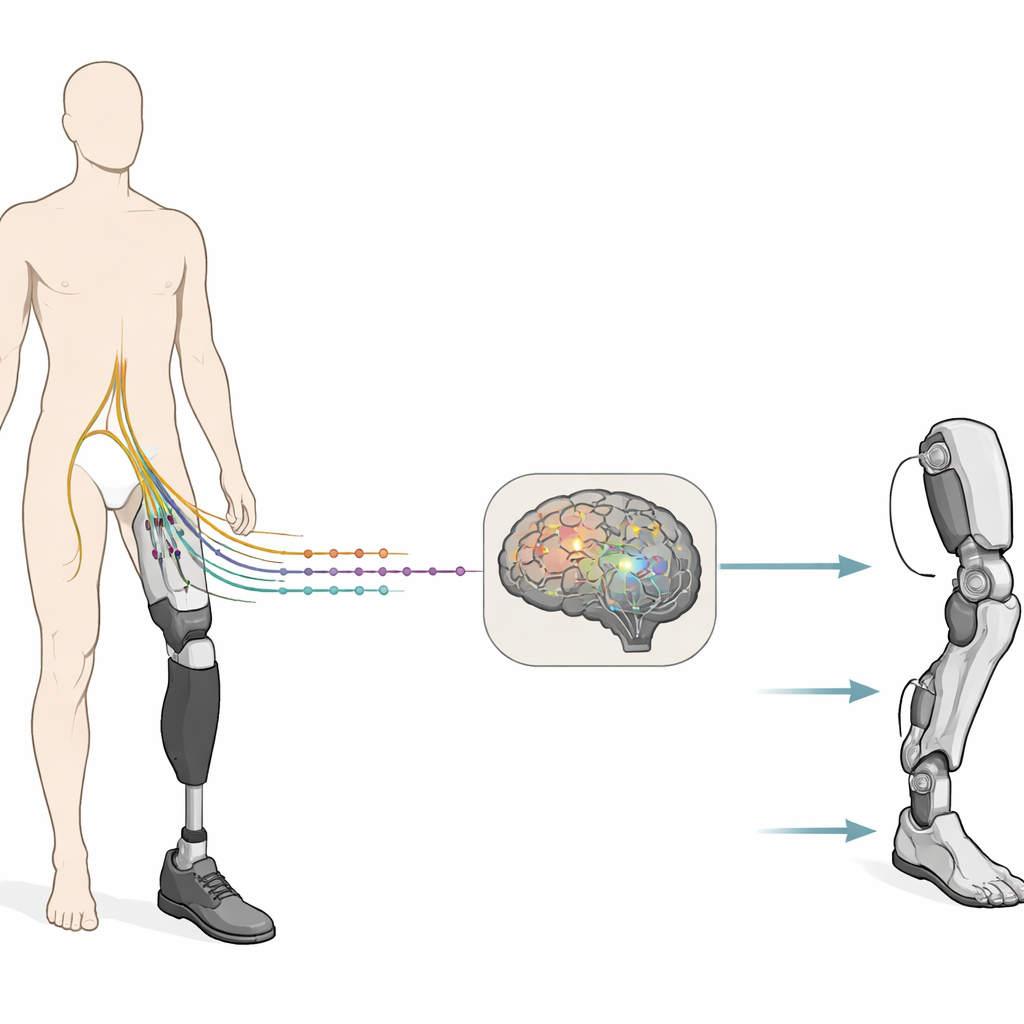
Pour les personnes ayant perdu une jambe au-dessus du genou, marcher avec une prothèse peut ressembler davantage à piloter une machine rigide qu’à mobiliser une partie de leur propre corps. Cette étude explore une voie différente : écouter directement les nerfs restants de la jambe lorsque les amputés tentent de bouger leur jambe « fantôme », et utiliser ces signaux pour commander une future jambe bionique. En exploitant la même connectique que le cerveau utilisait autrefois pour déplacer le genou, la cheville et les orteils, les chercheurs montrent qu’un contrôle naturel et intuitif d’un membre artificiel pourrait être à portée de main.
Écouter les nerfs à l’intérieur de la cuisse
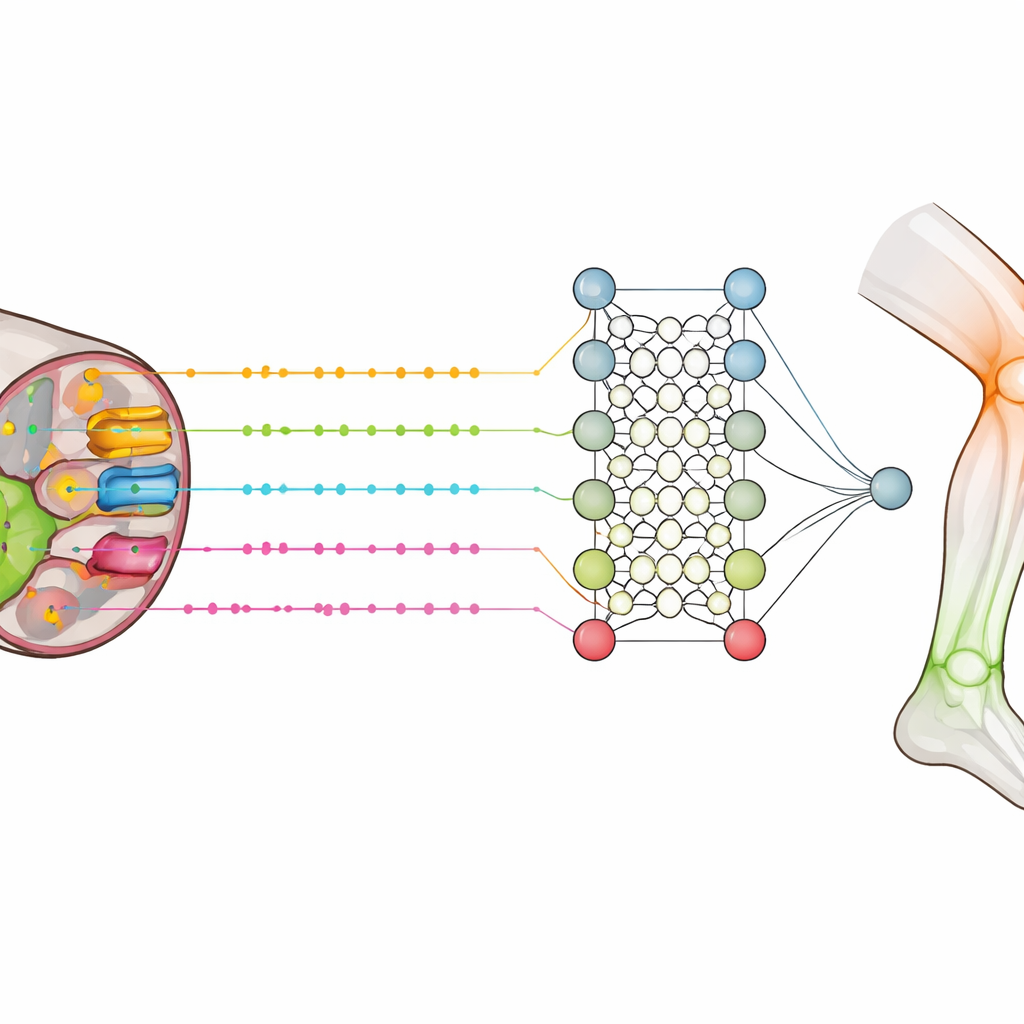
L’équipe a travaillé avec deux volontaires ayant perdu une jambe au-dessus du genou mais qui ressentaient encore de manière vive et pouvaient « bouger » leur membre fantôme. Les chirurgiens ont implanté quatre rubans d’électrodes extrêmement fins à l’intérieur d’une branche du nerf sciatique, à l’arrière de la cuisse. Chaque ruban comportait plusieurs microsites d’enregistrement, pour un total de 56 canaux. Lorsque les participants étaient assis et invités à fléchir ou tendre leur genou, leur cheville ou leurs orteils fantômes sur commande, les électrodes captaient des rafales d’activité électrique provenant de fibres nerveuses qui contrôlaient autrefois des muscles aujourd’hui absents après l’amputation.
Les mouvements fantômes laissent de réelles traces électriques
Même si la partie inférieure de la jambe avait disparu, les tentatives de la mouvoir produisaient des signaux clairs et structurés dans le nerf. La plupart des sites d’enregistrement répondaient à au moins un type de mouvement, et beaucoup faisaient la distinction entre flexion et extension. Certaines électrodes étaient davantage sensibles aux mouvements du genou, d’autres à la cheville ou aux orteils, reflétant la manière dont les différents groupes musculaires sont câblés dans le nerf. L’amplitude et le timing des motifs d’activité nerveuse différaient selon l’articulation, ce qui suggère que la « carte » originelle du contrôle de la jambe persiste dans le moignon nerveux restant. Les chercheurs ont également constaté que ces schémas moteurs correspondaient bien à l’anatomie connue : les canaux nerveux activés pour un mouvement donné tendaient à correspondre aux muscles qui produiraient normalement ce mouvement.
Apprendre un décodeur inspiré du cerveau
Capturer l’activité nerveuse n’est qu’une partie du problème ; une prothèse future doit convertir rapidement ces signaux complexes en commandes. Les scientifiques se sont tournés vers un réseau neuronal à impulsions, un type de réseau artificiel qui communique par de brèves rafales électriques, à la manière des neurones réels. Ils ont d’abord transformé les enregistrements nerveux bruts en trains d’impulsions denses mettant en valeur l’évolution temporelle de la puissance du signal. Ces trains de spikes ont ensuite été présentés à un décodeur compact qui a appris à les classer en « catégories » de mouvement telles que flexion de la cheville ou extension du genou. Par rapport aux outils d’apprentissage automatique classiques, le décodeur à impulsions s’est montré à la fois plus précis et plus efficace, reconnaissant de manière fiable plusieurs mouvements intentionnels à partir de courts extraits d’activité nerveuse.
Combiner signaux nerveux et musculaires
Comme les électrodes étaient placées entre les muscles de la cuisse, elles captaient aussi de faibles signaux musculaires dans une bande de fréquences plus basse. En filtrant les enregistrements, l’équipe a pu séparer l’activité de type musculaire des spikes nerveux plus rapides. Lorsqu’ils ont entraîné leur décodeur uniquement sur les signaux musculaires, les performances se sont améliorées par rapport à l’utilisation des seules données nerveuses haute fréquence. Mieux encore, la combinaison des deux sources — nerf et muscle résiduel — a encore renforcé la précision, en particulier pour les actions du genou et de la cheville. Cela suggère qu’une seule technologie implantée pourrait exploiter à la fois le trafic nerveux et l’activité musculaire résiduelle pour fournir un signal de commande plus riche et plus stable pour une jambe robotique.
Ressentir le sol tout en bougeant la jambe
Les mêmes électrodes intraneurales qui écoutaient les commandes motrices pouvaient aussi être utilisées dans le sens inverse : envoyer de faibles impulsions électriques dans le nerf pour évoquer des sensations. Dans des travaux antérieurs avec ces volontaires, la stimulation via ces implants produisait des sensations de type tactile sur la plante du pied et les orteils. Dans la présente étude, les chercheurs ont cartographié les recouvrements entre enregistrements liés au moteur et sensations liées au toucher. Ils ont constaté que les fibres nerveuses dédiées au mouvement et à la sensation étaient en grande partie séparées au niveau de la cuisse, ce qui pourrait aider les concepteurs à attribuer certains contacts principalement au décodage moteur et d’autres principalement au retour sensoriel, réduisant les interférences entre les deux.
Ce que cela signifie pour les futures jambes bioniques
Pour un lecteur non spécialisé, le message principal est que les « fils » permettant de bouger une jambe manquante sont toujours actifs et lisibles, même des années après l’amputation. En plaçant des électrodes fines à l’intérieur du nerf restant et en utilisant des algorithmes inspirés du cerveau pour interpréter les signaux, il est possible de dire, instant après instant, si un amputé tente de plier le genou, d’orienter la cheville ou de courber les orteils d’un membre fantôme. Associée à une stimulation électrique rétablissant une sensation tactile de la plante du pied manquante, cette approche pourrait permettre des prothèses de jambes qui se sentent et bougent beaucoup plus comme un membre naturel. Bien que le travail en soit encore au stade précoce et de laboratoire et n’ait été testé hors ligne que sur deux personnes, il pose des bases importantes pour des prothèses futures se connectant directement au système nerveux, offrant un contrôle plus intuitif, un meilleur équilibre et un sentiment d’incarnation renforcé.
Citation: Rossi, C., Bumbasirevic, M., Čvančara, P. et al. Decoding phantom limb movements from intraneural recordings. Nat Commun 17, 2511 (2026). https://doi.org/10.1038/s41467-026-69297-0
Mots-clés: membre fantôme, neuroprothèses, interface nerf périphérique, réseaux neuronaux à impulsions, amputation des membres inférieurs