Clear Sky Science · fr
Robot volant autonome en forme de main pour la préhension et l’interaction aériennes
Des assistants volants avec qui l’on peut presque se serrer la main
Imaginez un petit robot volant qui non seulement filme votre environnement mais peut aussi ouvrir une porte, vous tendre un verre ou décrocher un colis d’une étagère difficile d’accès. Cette étude présente exactement ce type d’appareil : un drone compact dont le châssis fait aussi office de main. En mêlant des concepts du vol des oiseaux et de la préhension humaine, les chercheurs montrent comment des robots aériens pourraient dépasser la simple observation pour devenir des aides actives à la maison, en usine ou lors d’opérations de recherche et sauvetage.
Des caméras volantes aux mains volantes
La plupart des drones actuels sont des « yeux volants » employés pour la photographie, la cartographie ou l’inspection. Quand les ingénieurs tentent d’ajouter des bras robotiques pour que les drones puissent saisir ou pousser des objets, les machines deviennent vite volumineuses, lourdes, gourmandes en énergie et difficiles à piloter—surtout à l’intérieur ou près des personnes. Les auteurs s’attaquent à ce problème en repensant le corps même du drone. Plutôt que d’ajouter un bras distinct, ils conçoivent l’ensemble du châssis pour qu’il agisse comme une main capable d’enlacer des objets, de se percher sur des poteaux ou des arbres, tout en conservant une grande agilité dans des espaces restreints.
Un corps volant en forme de main
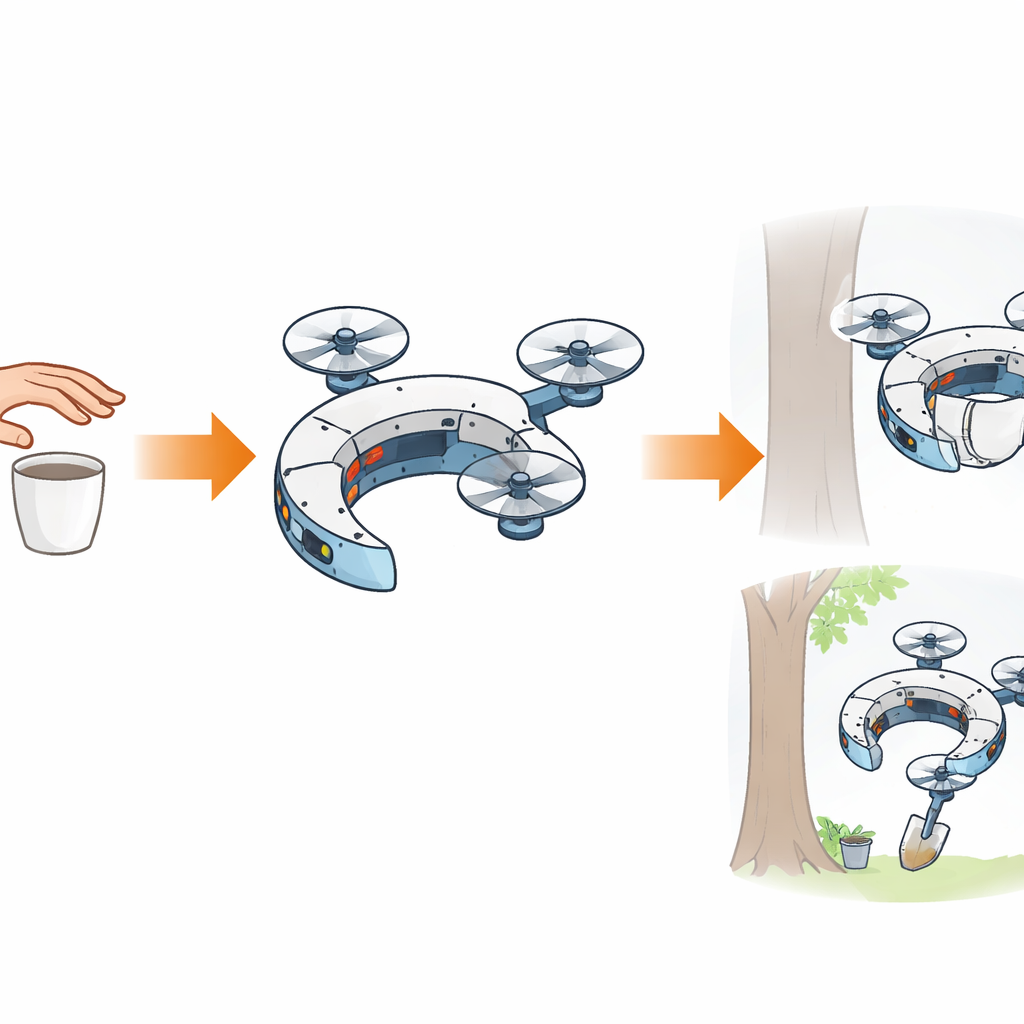
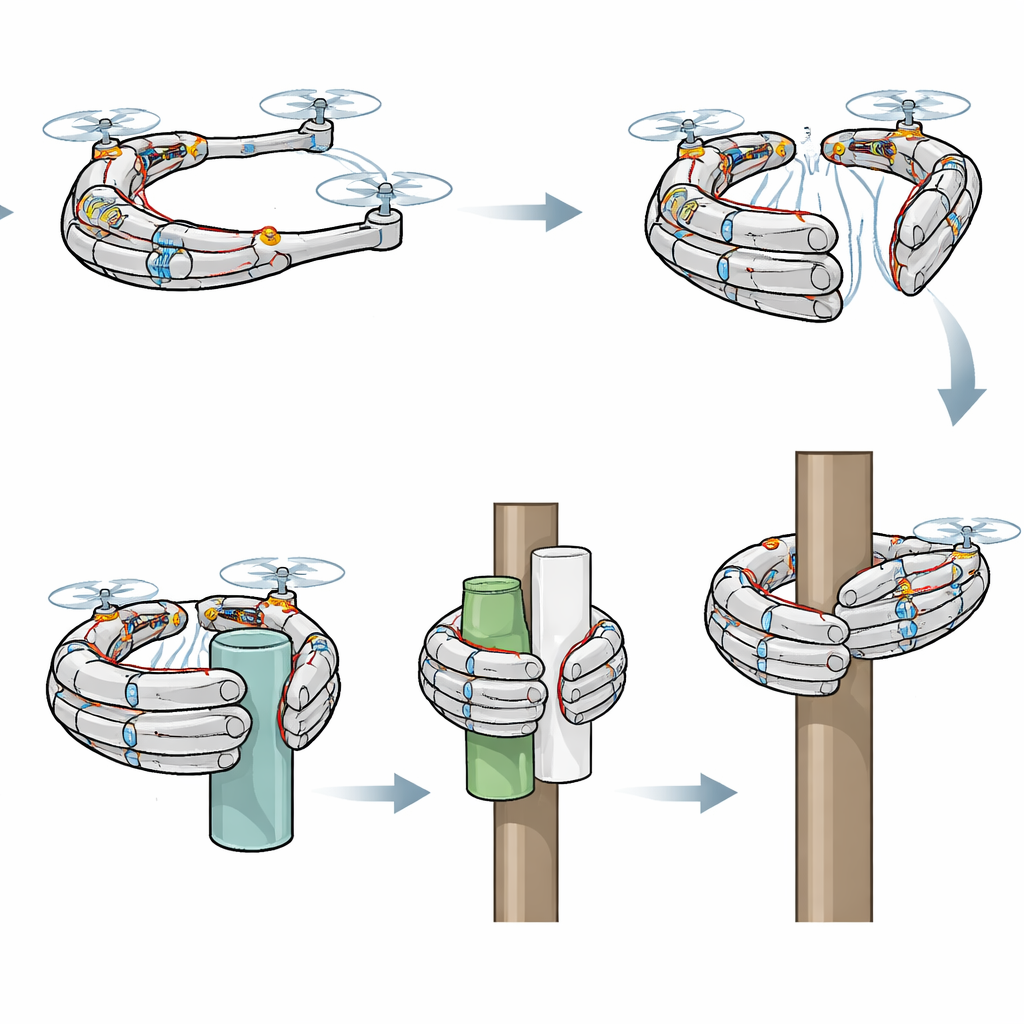
Le nouveau robot, nommé HI‑ARM, a à peu près la taille et le poids d’une main adulte. Son châssis forme un C ouvert qui rappelle une paume courbée avec des doigts. À l’intérieur de cet anneau se trouvent des segments télescopiques et des articulations torsadées actionnés non pas par de nombreux moteurs mais par un seul cordon de type tendon tiré par un servo. Des ressorts permettent à la structure de se plier puis de revenir à sa forme initiale, stockant et restituant l’énergie comme le font les muscles et les tendons. Cette conception sous‑actionnée permet au robot de s’ajuster autour d’objets inconnus : à mesure que le cordon se tend, différentes parties se compressent et se tordent jusqu’à s’adapter naturellement à ce qui est saisi.
Comment le robot raisonne et vole
Pour rendre ce corps morphing utile, l’équipe construit un « cerveau » en couches pour le robot. Une partie planifie où le drone doit voler et quand il doit saisir, relâcher ou se percher, en s’appuyant sur une bibliothèque d’actions élémentaires comme « attraper », « lâcher » ou « se percher sur un poteau ». Une autre partie traduit ces plans en trajectoires fluides dans l’espace que le drone peut suivre en temps réel. Un système de contrôle rapide estime en permanence la position du robot, le déplacement du centre de gravité lorsque la structure se déforme, ainsi que les forces supplémentaires lorsqu’il soulève ou pousse des objets. Des algorithmes adaptatifs détectent ces perturbations et augmentent ou rééquilibrent automatiquement la poussée des quatre hélices pour que le vol reste stable même lorsque le corps serre une bouteille ou pousse une porte.
Ce que cette main volante peut faire
Dans des essais en intérieur, HI‑ARM réalise des gestes familiers proches de ceux d’un humain. Il utilise sa « paume » pour saisir et transporter une bouteille d’eau pleine le long d’une trajectoire précise, et ses « bouts de doigt » pour pincer et soulever une fine serviette—une tâche particulièrement délicate pour une machine. Le même mécanisme s’adapte à des jouets, des boîtes, des sacs et des blocs de formes étranges sans connaître leur géométrie à l’avance. Le robot peut s’approcher d’un tronc d’arbre ou d’un poteau, l’enlacer, couper ses hélices et simplement rester accroché, consommant bien moins d’énergie que pour faire du vol stationnaire. Il peut aussi aborder une porte, s’enrouler autour de la poignée et pousser la porte pour l’ouvrir tout en gardant son équilibre malgré les forces de réaction.
Aider les personnes et travailler en extérieur
Les chercheurs explorent aussi comment un tel appareil pourrait interagir avec des personnes. Dans une scène domestique, le drone prend un colis dans la main d’une personne, le range, va chercher une boisson sur une table, la tend, récupère ensuite la bouteille vide et finit par se percher sur un porte‑manteau pour attendre la tâche suivante—le tout en une seule séquence continue et fluide. Grâce à des lunettes vidéo et une télécommande simple utilisable d’une main, une personne à mobilité réduite guide à distance le robot pour qu’il saisisse une tasse de café à l’extérieur et la ramène sur des dizaines de mètres. Lors d’essais en extérieur, le drone se perche sur du bambou et des poteaux, se faufile dans une étroite ouverture rocheuse en rétrécissant son corps, et traverse une rivière en transportant une boisson, suggérant des rôles pour la livraison, l’inspection et le sauvetage.
Ce que cela signifie pour la vie quotidienne
Ce travail montre qu’un petit robot volant en forme de main peut combiner un vol agile avec des modes de préhension, de perchoir et d’interaction étonnamment proches du geste humain. En intégrant étroitement la conception du corps, la planification des mouvements et le contrôle adaptatif, les auteurs surmontent de nombreux problèmes de taille et de stabilité qui freinaient les manipulateurs aériens précédents. Si les versions futures devront embarquer une meilleure vision et une prise de décision plus sophistiquée pour fonctionner de façon entièrement autonome, cette étude ouvre la voie à un avenir où des « mains volantes » pourraient livrer des colis, assister des personnes en situation de handicap, entretenir des infrastructures et accomplir des tâches délicates dans des lieux difficiles ou dangereux d’accès pour les humains.
Citation: Wu, Y., Yang, F., Jin, R. et al. Hand-like autonomous flying robot for airborne grasping and interaction. Nat Commun 17, 2200 (2026). https://doi.org/10.1038/s41467-026-68967-3
Mots-clés: manipulation aérienne, main robotique volante, drones, interaction homme-robot, robotique biomimétique