Clear Sky Science · fr
Un œil bionique composé artificiel, à l’échelle d’un insecte, combinant vision et odorat
Yeux et nez de robot réunis dans un tout petit dispositif
Imaginez un robot-insecte qui non seulement voit où il va, mais « sent » aussi les gaz dangereux dans l’air — le tout grâce à un dispositif pas plus grand que l’œil d’une mouche. Cet article décrit justement une telle réalisation : un œil composé artificiel miniature qui combine vision et odorat dans un capteur unique et ultra-léger. En empruntant des stratégies aux mouches des fruits et autres insectes, les chercheurs montrent comment de futurs drones et petits robots pourraient naviguer rapidement et en sécurité dans des environnements encombrés et dangereux tout en consommant très peu d’énergie.

Ce que la nature a appris aux ingénieurs
Des insectes comme la mouche des fruits s’appuient sur des yeux composés — des coupoles remplies de centaines de petites lentilles — pour détecter le mouvement sur un large champ de vision, ce qui les aide à éviter prédateurs et obstacles. En parallèle, leurs antennes fournissent un sens de l’odorat efficace, leur permettant de repérer nourriture, partenaires ou menaces dans l’air. Ces deux flux d’informations sont combinés dans le cerveau de l’insecte pour guider des décisions rapides. Les auteurs ont voulu recréer ce double sens en matériel : un dispositif unique, à l’échelle d’un insecte, qui imite l’œil de la mouche pour la détection de mouvement grand-angle et intègre un « nez » chimique pour analyser l’air ambiant, puis fusionne les deux signaux pour un comportement plus intelligent.
Construire un petit œil courbé qui fonctionne vraiment
L’équipe a fabriqué un œil artificiel cylindrique d’à peu près la taille d’une petite tête d’insecte, intégrant 1 027 petites lentilles dans un carré de seulement 1,5 millimètre de côté. À l’aide d’une technique d’impression 3D ultra-précise, ils ont directement imprimé une matrice microlentilles courbée sur une couche flexible de détecteurs organiques de lumière. Chaque lentille s’aligne sur un détecteur unique, formant un « pixel » individuel qui regarde dans sa propre direction, à la manière d’un ommatidium insecte. Les lentilles sont conçues avec un angle d’acceptation étroit pour que la lumière provenant d’une direction ne se répande pas vers les pixels voisins, reproduisant de près l’isolation optique naturelle des yeux composés réels. Pour faire face au brouillard et à l’humidité, les chercheurs ont ajouté de minuscules structures filamenteuses entre les lentilles qui empêchent la condensation de gouttelettes à la surface, similaire aux poils auto-nettoyants autour des vrais yeux d’insectes.
Voir le mouvement et détecter l’air en temps réel
Sous les lentilles se trouve une couche photosensible spécialement conçue, faite d’un mélange de semi‑conducteurs organiques et de points quantiques de sulfure de plomb. Cette combinaison permet au dispositif de détecter la lumière de l’ultraviolet au visible jusqu’au proche infrarouge tout en répondant en environ un dix‑millième de seconde — suffisamment rapide pour un taux de fusion de scintillement d’environ 1 000 images par seconde. Plutôt que de former des images nettes et détaillées, le dispositif enregistre des points lumineux changeants sur son large champ de vision, qu’un modèle mathématique simple convertit en informations sur la position des objets, leur distance approximative et leur mouvement. En parallèle, une matrice colorimétrique imprimée par jet d’encre joue le rôle d’un nez artificiel : de minuscules pastilles contenant des complexes métalliques et des indicateurs de pH changent de couleur lorsqu’elles sont exposées à des gaz dangereux spécifiques. Un algorithme de hachage léger, inspiré des mouches, convertit ensuite ces changements de couleur en identification du gaz et estimation grossière de sa concentration, avec environ 93 % de précision sur dix vapeurs toxiques courantes.
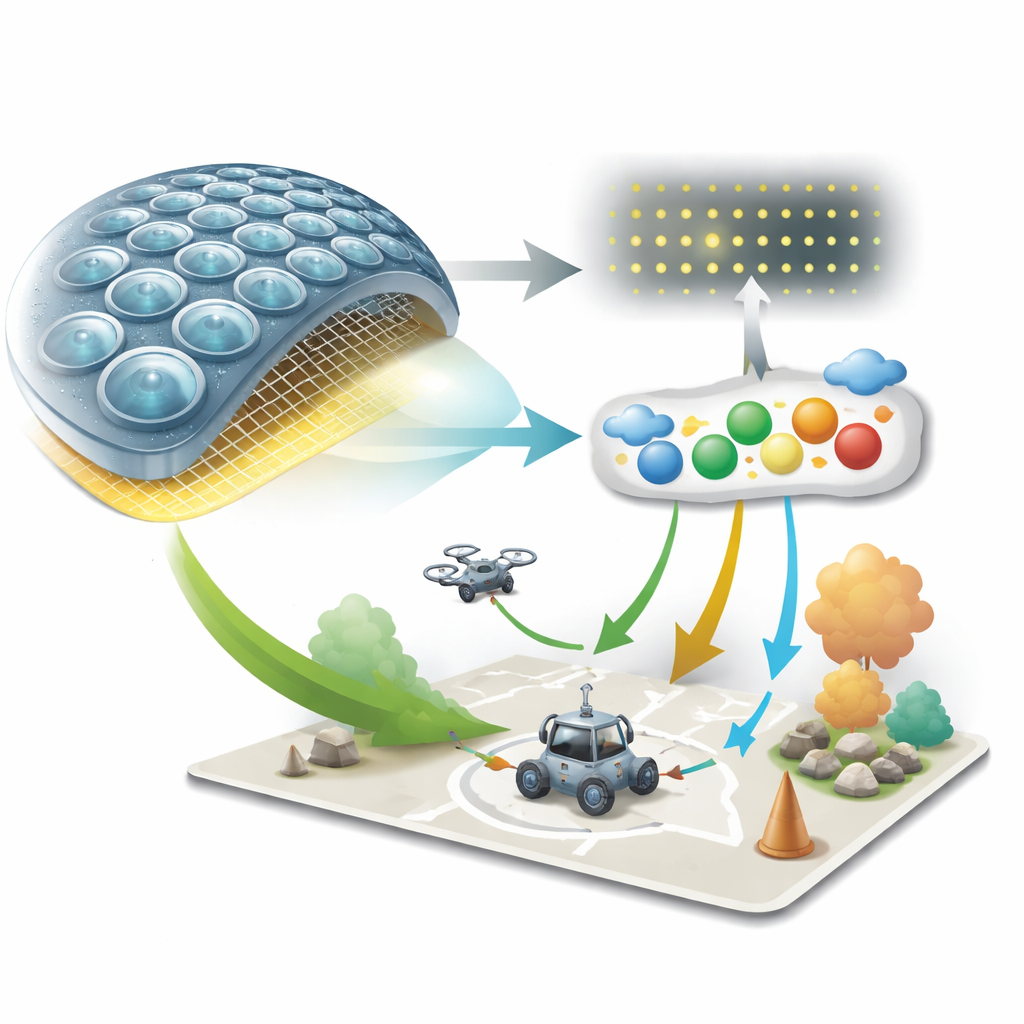
De la paillasse aux robots roulants et aux drones
Pour démontrer que cet « œil-et-nez » à l’échelle d’un insecte est utile hors du laboratoire, les chercheurs l’ont monté sur deux petites plateformes sans pilote. Sur un robot à roues omnidirectionnel, l’œil courbé a permis au système de surveiller un champ horizontal de 180 degrés et de détecter le mouvement assez rapidement pour éviter des obstacles approchants, même en conditions de brouillard. Des règles simples implémentées en matériel — encore une fois inspirées par le comportement d’échappement des insectes — ont permis au robot de reculer face à des objets entrants ou de les contourner en se déplaçant. Sur un petit drone, le même dispositif a suivi la position de sources lumineuses en mouvement en trois dimensions et, conjointement avec le capteur de gaz, a guidé l’exploration autonome d’un environnement d’essai contenant des sources lumineuses et des panaches de produits chimiques dangereux. Les informations visuelles et olfactives ont été combinées pour que le drone puisse à la fois suivre des cibles et cartographier les gaz dangereux dans l’espace.
Pourquoi c’est important pour les petites machines de demain
Ce travail montre qu’il est possible d’intégrer à la fois une vision grand‑angle et haute vitesse et une détection chimique dans un capteur d’à peu près la taille de l’œil d’un insecte réel. Le dispositif sacrifie le détail fin des images au profit de la sensibilité au mouvement, d’une large couverture spectrale et de l’efficacité énergétique — exactement les compromis qui importent pour de petits drones et robots aux ressources énergétiques et informatiques limitées. En unissant « yeux » et « nez » dans un seul système compact et en empruntant des stratégies de fusion au cerveau des insectes, l’étude ouvre la voie à de futurs essaims de petites machines autonomes et peu coûteuses capables d’éviter les obstacles, de reconnaître des gaz dangereux et d’explorer des environnements complexes avec l’agilité des insectes volants.
Citation: Wang, J., Wei, S., Qin, N. et al. An insect-scale artificial visual-olfactory bionic compound eye. Nat Commun 17, 2259 (2026). https://doi.org/10.1038/s41467-026-68940-0
Mots-clés: œil bionique composé, robotique bioinspirée, détection multimodale, systèmes de micro-vision, détection de gaz dangereux