Clear Sky Science · fr
Sauts robotiques améliorés par hypogravité induite par poussée, obtenant des sauts précis, prévisibles et prolongés
Des robots qui sautent comme s’ils étaient sur la Lune
Imaginez un robot de secours capable de franchir des murs d’un bond, de sauter par-dessus des ruisseaux ou de se faufiler par une fenêtre en mouvement sans manquer sa zone d’atterrissage de plus d’un centimètre. Cet article décrit un nouveau type de machine sauteuse qui fait exactement cela en se conférant brièvement une « faible gravité », comme sur la Lune ou Pluton, tout en gardant ses sauts précis et prévisibles.
Pourquoi les robots sauteurs peinent aujourd’hui
Des animaux comme les sauterelles forestières ou les grenouilles peuvent sauter loin, atterrir sur des perchoirs étroits et corriger leur trajectoire en vol lorsque les conditions changent. La plupart des robots n’en sont pas capables. Les robots sauteurs traditionnels font face à un compromis : ils peuvent soit sauter très loin en utilisant de forts ressorts ou moteurs, soit atterrir de façon précise et sûre, mais rarement les deux. Les conceptions à ressort « catapulte » emmagasinent beaucoup d’énergie mais se rechargent lentement et sont difficiles à contrôler une fois en l’air. Des jambes entraînées directement par moteurs sont plus faciles à contrôler mais manquent de l’impulsion nécessaire pour des sauts très hauts. Des ailes ou rotors additionnels peuvent prolonger le temps de vol, mais ils rendent souvent la trajectoire chaotique et imprévisible, ce qui pose problème si l’on doit atteindre une petite cible ou éviter des obstacles mobiles.
Simuler une faible gravité avec une poussée d’air
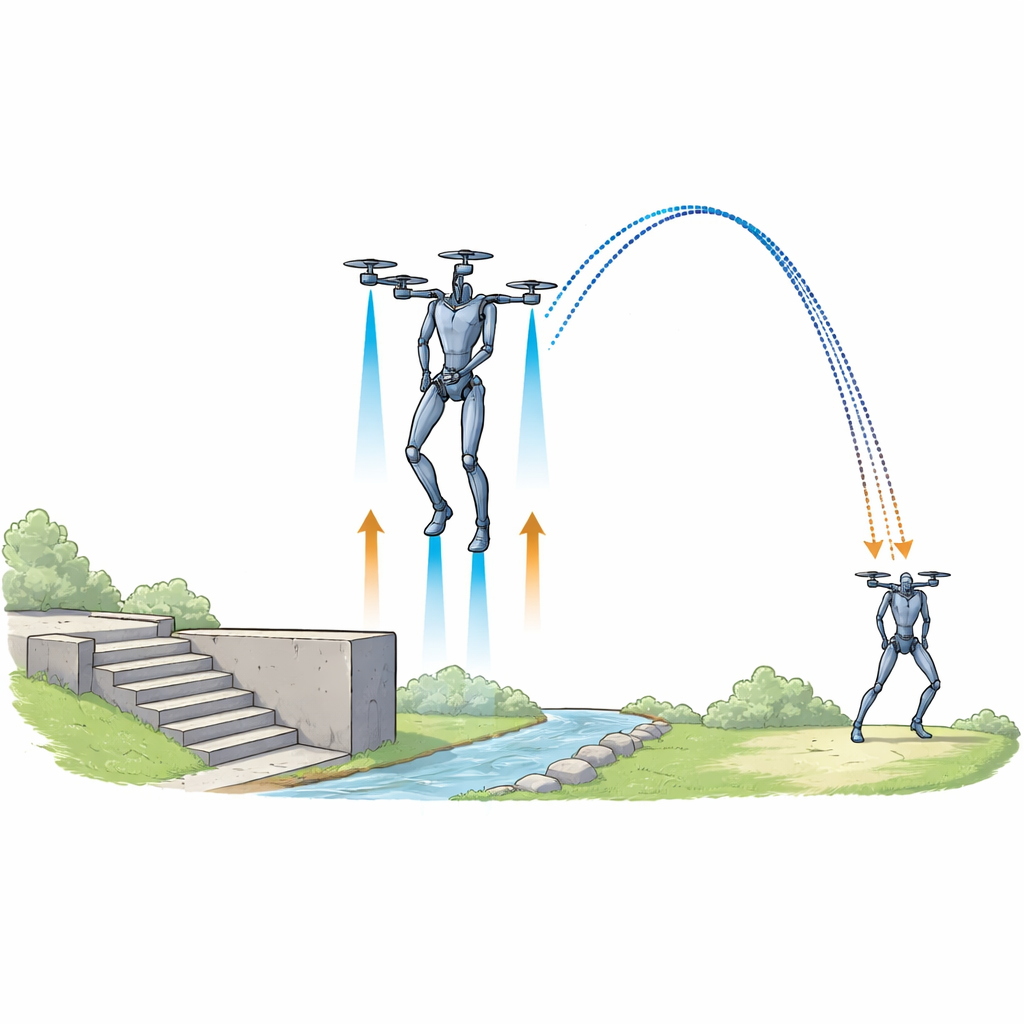
Les chercheurs ont construit un robot bipède de 370 grammes nommé GravOff qui évite ce compromis en créant son propre environnement de faible gravité. Le robot possède une paire de longues jambes d’allure insectoïde entraînées directement par des moteurs, ainsi que quatre petits propulseurs montés sur un large châssis. Pendant un saut, les jambes fournissent une impulsion rapide au sol pour atteindre une grande vitesse de décollage. En parallèle, les hélices poussent vers le haut juste assez pour compenser une partie de la gravité terrestre, condition que les auteurs appellent hypogravité induite par poussée. Parce que la « gravité effective » est plus faible, la même puissance des jambes lance le robot sur un arc bien plus haut et plus long — jusqu’à 6,9 mètres de haut, environ 46 fois sa hauteur corporelle — comparable aux meilleurs sauteurs record mais avec des vitesses de décollage et d’atterrissage plus douces.
Tracer et diriger l’arc parfait
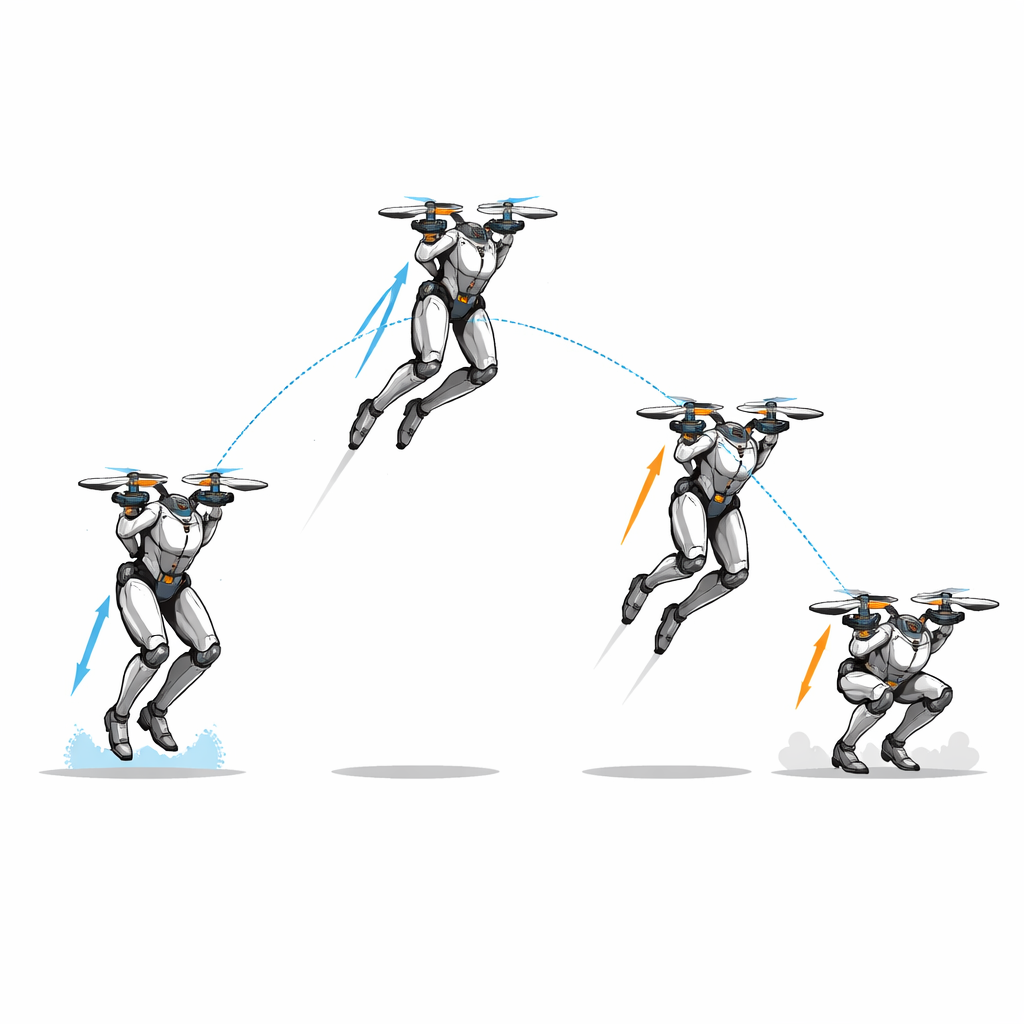
Ce qui rend GravOff particulièrement remarquable n’est pas seulement la distance de ses sauts, mais la précision avec laquelle il suit une trajectoire choisie. L’équipe considère chaque saut comme un arc horodaté, où position et timing sont verrouillés ensemble comme des points sur une parabole dessinée. À l’aide de capteurs et d’un algorithme de commande prédictive, le robot compare sa motion réelle en vol à cette courbe de référence des dizaines de fois par seconde et incline légèrement ses rotors pour se ramener sur la trajectoire. Fait crucial, les propulseurs peuvent pivoter indépendamment de l’inclinaison du corps du robot, de sorte que celui-ci peut orienter sa poussée sans avoir à pencher tout son châssis, maintenant l’équilibre et la direction séparés. Ce double contrôle permet à GravOff d’atterrir dans un carré de seulement 25 centimètres de côté avec une répétabilité au niveau du millimètre, même lorsque l’angle de décollage est erroné jusqu’à 15 degrés ou lorsqu’un ventilateur souffle un vent de 3,5 mètres par seconde durant le vol.
Atterrissages souples et stables sans rebond
Les sauts élevés impliquent généralement des atterrissages violents, qui peuvent endommager le matériel ou provoquer des chutes. GravOff aborde ce problème avec deux modes d’atterrissage. Pour les impacts particulièrement durs, un amortisseur souple imprimé en 3D dans chaque jambe aide à absorber l’énergie. Pour des atterrissages précis sur des cibles petites ou mobiles, le robot replie activement ses jambes puis les ré-étend au moment opportun, allongeant le temps de contact avec le sol. Cet « amortissement actif » réduit les forces d’impact d’un facteur quatre par rapport à un atterrissage passif et annule presque l’impulsion entrante, de sorte que le robot s’arrête dès le premier contact au lieu de rebondir.
Des sauts en laboratoire aux missions sur le terrain
Au-delà des tests contrôlés en intérieur, les auteurs montrent que GravOff peut combiner saut, rampement et roulage pour affronter des terrains réels. Il peut ramper lentement sur de l’herbe, du sable, des pavés et du bitume rainuré pour se positionner en vue d’un décollage sûr, puis utiliser des sauts en hypogravité pour franchir des obstacles comme des escaliers à plusieurs marches, un mur de 2,35 mètres de haut ou un ruisseau large de trois mètres. La stratégie de saut en basse gravité s’avère également beaucoup plus économe en énergie que le vol pur pour franchir des obstacles de taille moyenne : dans certains essais, les sauts ont consommé moins d’un dixième de l’énergie totale requise pour survoler le même obstacle en stationnaire ou en vol.
Ce que cela signifie pour les robots de demain
En termes simples, ce travail montre que les robots peuvent sauter plus loin, plus précisément et plus sûrement en simulant une gravité plus faible et en ajustant leur trajectoire après le décollage. Le design de GravOff laisse entrevoir des explorateurs futurs capables de bondir sur des décombres lors d’opérations de secours ou de traverser falaises et cratères sur d’autres planètes, tout en prédisant exactement où et quand ils atterriront. Les mêmes idées — compenser la gravité par la poussée et diriger l’arc en vol — pourraient être ajoutées à de nombreux autres robots sauteurs, transformant potentiellement le saut en un mode de déplacement fiable et planifié plutôt qu’en un dernier recours risqué.
Citation: Sun, Z., Zhao, J., Li, Y. et al. Robotic leaping enhanced by thrust-induced hypogravity, achieving precise, predictable, and extended jumps. Nat Commun 17, 2523 (2026). https://doi.org/10.1038/s41467-026-68932-0
Mots-clés: robots sauteurs, hypogravité, vectorisation de poussée, locomotion à pattes, contrôle de trajectoire