Clear Sky Science · fr
Une architecture à pointes inspirée du vivant permet un encodage du toucher à faible consommation
Pourquoi un toucher plus intelligent importe pour les robots
Nos bouts des doigts nous permettent de percevoir un grain de sable, un verre qui glisse ou une légère tape en une fraction de seconde, tout en consommant très peu d’énergie. À mesure que les robots sortent des usines pour entrer dans les maisons, les hôpitaux et des lieux de travail denses, ils auront besoin d’un sens du toucher comparable pour interagir en sécurité avec les personnes et les objets fragiles. Cette étude présente une nouvelle peau artificielle et un système de traitement inspiré du cerveau qui permettent aux machines de détecter avec grande précision l’endroit du contact, tout en maintenant une consommation d’énergie extrêmement faible — une exigence clé pour les robots mobiles et collaboratifs du futur.
Une peau souple qui ressent comme la nôtre
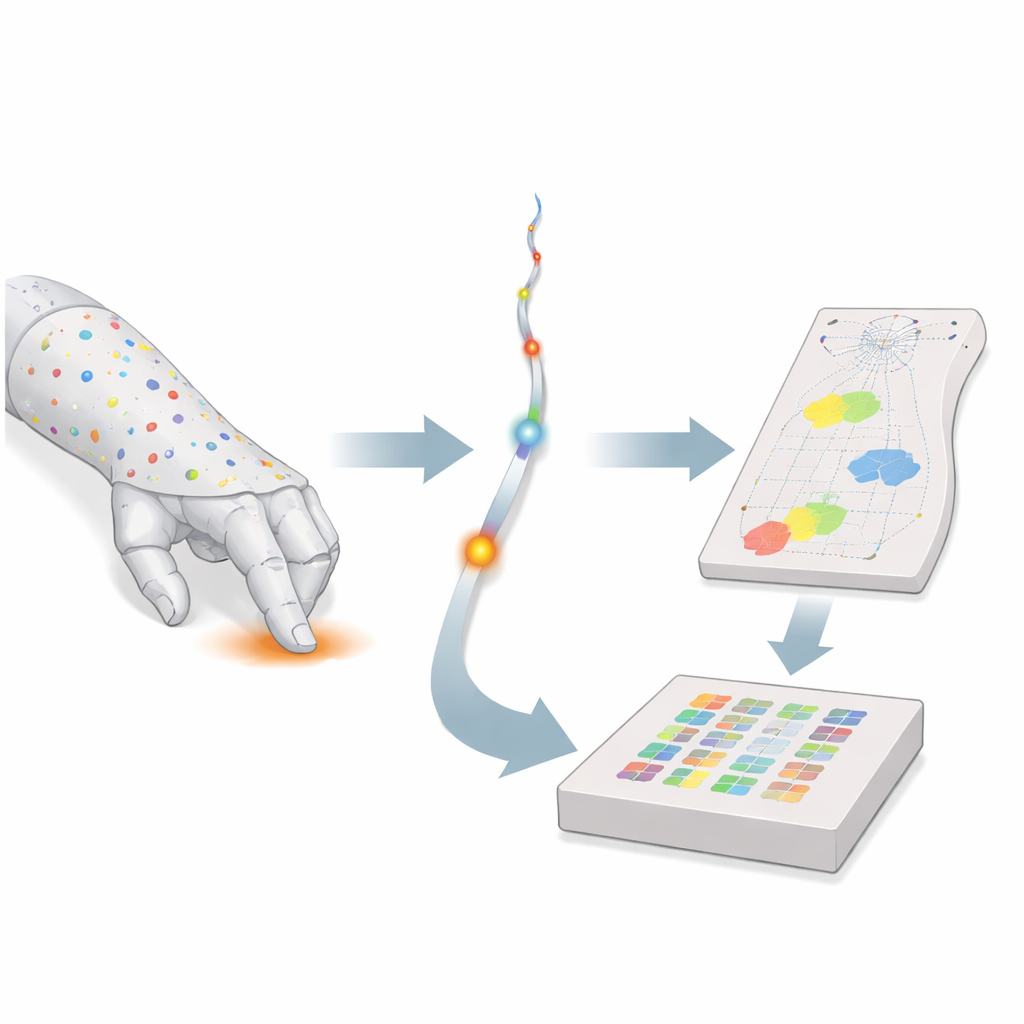
Les chercheurs ont construit une « e-peau » souple en silicone, en forme d’avant-bras humain, et y ont intégré 21 minuscules capteurs optiques le long d’une seule fibre aussi fine qu’un cheveu. Ces capteurs, appelés réseaux de Bragg dans la fibre (Fiber Bragg Gratings), réagissent à l’étirement et à la flexion de la peau en décalant la couleur de la lumière réfléchie à l’intérieur de la fibre. Comme la fibre serpente sous la surface, chaque capteur est sensible non seulement à un point unique mais à une petite région, à l’image des récepteurs tactiles réels répartis dans notre peau. Certains de ces récepteurs artificiels réagissent fortement à une pression très locale, tandis que d’autres répondent plus largement aux déformations, reflétant comment différentes terminaisons nerveuses de la peau humaine captent à la fois les détails fins et la forme globale.
Transformer le toucher en impulsions électriques
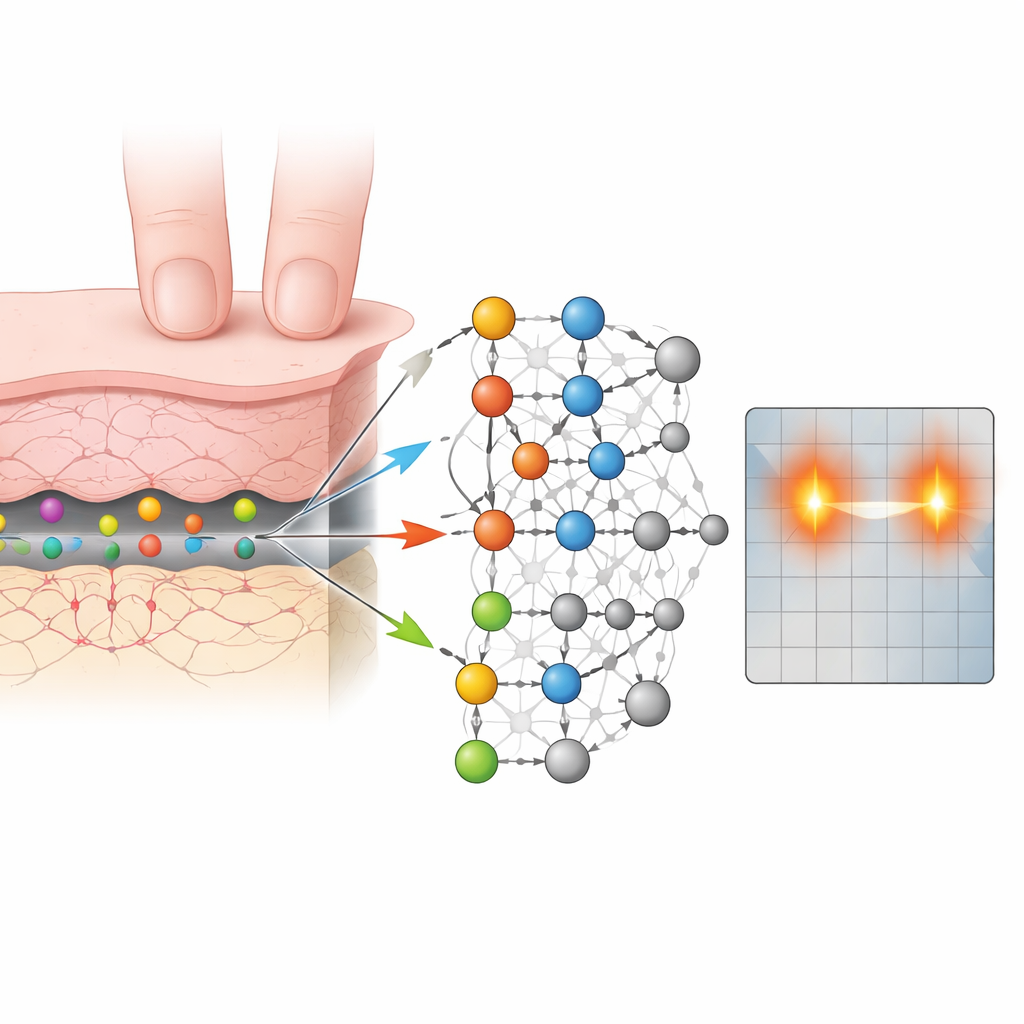
Pour interpréter ce flux riche de données, l’équipe n’a pas recours aux modèles classiques d’apprentissage profond qui traitent des trames de nombres. Elle a plutôt imité la biologie de plus près en utilisant un réseau de neurones à impulsions, où l’information circule sous forme de brèves impulsions électriques, ou « spikes », similaires aux potentiels d’action nerveux. Les signaux optiques de l’e-peau sont convertis en flux d’impulsions et envoyés dans le réseau. Chaque neurone de sortie de ce réseau représente un emplacement spécifique sur la peau, formant une carte interne bidimensionnelle de la surface. Lorsqu’un objet touche l’e-peau, un groupe de neurones déclenche des impulsions selon un motif qui révèle le lieu du contact, et le système calcule la localisation du toucher à partir du centre de cette activité.
Un toucher plus précis avec moins de ressources
Avec ce dispositif, le système localise des points de contact uniques sur l’avant-bras artificiel avec une erreur typique d’environ trois millimètres, dépassant d’environ un tiers un solide modèle d’apprentissage profond de référence et atteignant une résolution spatiale environ dix fois supérieure à celle attendue d’après l’espacement des capteurs seul. Il fonctionne aussi lorsque plusieurs points sont pressés simultanément, jusqu’à quatre contacts en même temps, et quand les pressions sont appliquées manuellement avec des forces et des directions variables. Les chercheurs ont exploré différents schémas d’agencement interne du réseau et ont constaté qu’une architecture inspirée des premières voies du toucher dans la moelle épinière — où des cellules excitatrices alimentent des interneurones inhibiteurs qui suppriment les sorties voisines — est cruciale pour affiner les détails spatiaux. Cette « inhibition latérale » aide à garder la représentation nette, empêchant le flou lorsque les contacts sont proches les uns des autres.
Conçu pour la faible consommation, pas seulement la précision
Un objectif central de ce travail est de maîtriser la consommation d’énergie, enjeu critique si tout le corps d’un robot est couvert de capteurs. L’équipe a entraîné le réseau en exerçant une pression croissante pour réduire le nombre d’impulsions émises, imitant le compromis évolutif entre performance brute et coût métabolique. En l’absence de contraintes, une architecture plus flexible et moins réaliste biologiquement performait légèrement mieux. Mais une fois l’activité en impulsions réduite à des niveaux économes en énergie, la topologie bio-inspirée l’emporte en fait, offrant une précision supérieure pour le même budget d’activité. Les chercheurs ont ensuite porté ce réseau sur une puce neuromorphique mixte-signal qui réalise neurones et synapses directement en électronique analogique. Sur ce matériel, le système tactile fonctionnait à une puissance sub-milliwatt pendant le toucher et à seulement quelques microwatts au repos, tout en subissant une perte minimale de précision.
Des avant-bras de laboratoire aux corps robotiques de demain
Globalement, ce travail montre que la combinaison soignée de capteurs souples et distribués avec un calcul en impulsions inspiré du cerveau peut donner aux machines un sens du toucher précis et rapide sans une facture énergétique lourde. En reproduisant non seulement la performance mais aussi les principes d’agencement des premières voies tactiles du système nerveux, le système suggère pourquoi l’évolution a pu favoriser certains motifs de circuits : ils fournissent une précision suffisante sous des contraintes énergétiques strictes. À grande échelle, des e-peaux et processeurs neuromorphiques similaires pourraient permettre aux robots et aux prothèses de sentir les contacts sur leurs surfaces, de réagir rapidement aux chocs inattendus et d’interagir de façon plus sûre et naturelle dans les environnements complexes et dynamiques où vivent et travaillent les humains.
Citation: Ortone, A., Filosa, M., Indiveri, G. et al. Bioinspired spiking architecture enables energy constrained touch encoding. Nat Commun 17, 2108 (2026). https://doi.org/10.1038/s41467-026-68858-7
Mots-clés: peau artificielle, détection tactile, réseaux de neurones à impulsions, matériel neuromorphique, sûreté en robotique