Clear Sky Science · fr
Micromachines acoustiques à changement de forme
Minuscules machines qui changent de forme grâce au son
Imaginez des flottes d’appareils microscopiques qui se plient, s’enroulent et s’épanouissent comme des fleurs sur commande—sans fils, sans chaleur ni produits chimiques—guidés uniquement par de douces ondes sonores. Cette étude présente précisément ces micromachines changeantes de forme, et montre comment les ultrasons peuvent reconfigurer rapidement et de manière réversible de minuscules structures. Ces progrès pourraient un jour aider à faire circuler des médicaments dans les vaisseaux sanguins, trier des cellules ou construire des matériaux intelligents capables de se réarranger à la demande.
Pourquoi le changement de forme importe à petite échelle
La nature regorge d’exemples vivants qui survivent en changeant de forme : les cloportes se roulent en boule protectrice, et des organismes microscopiques se contractent en millisecondes pour se nourrir ou fuir. Les ingénieurs cherchent à imiter cette agilité dans les robots souples, les dispositifs portables et les outils médicaux. Mais réduire ces systèmes à l’échelle du diamètre d’un cheveu humain est difficile. À ces tailles, la friction et les forces de surface dominent, les structures tendent à être rigides et fragiles, et de nombreux matériaux à changement de forme répondent trop lentement ou exigent des environnements particuliers, comme des températures spécifiques, des longueurs d’onde lumineuses ou des conditions chimiques.
Utiliser le son comme télécommande invisible
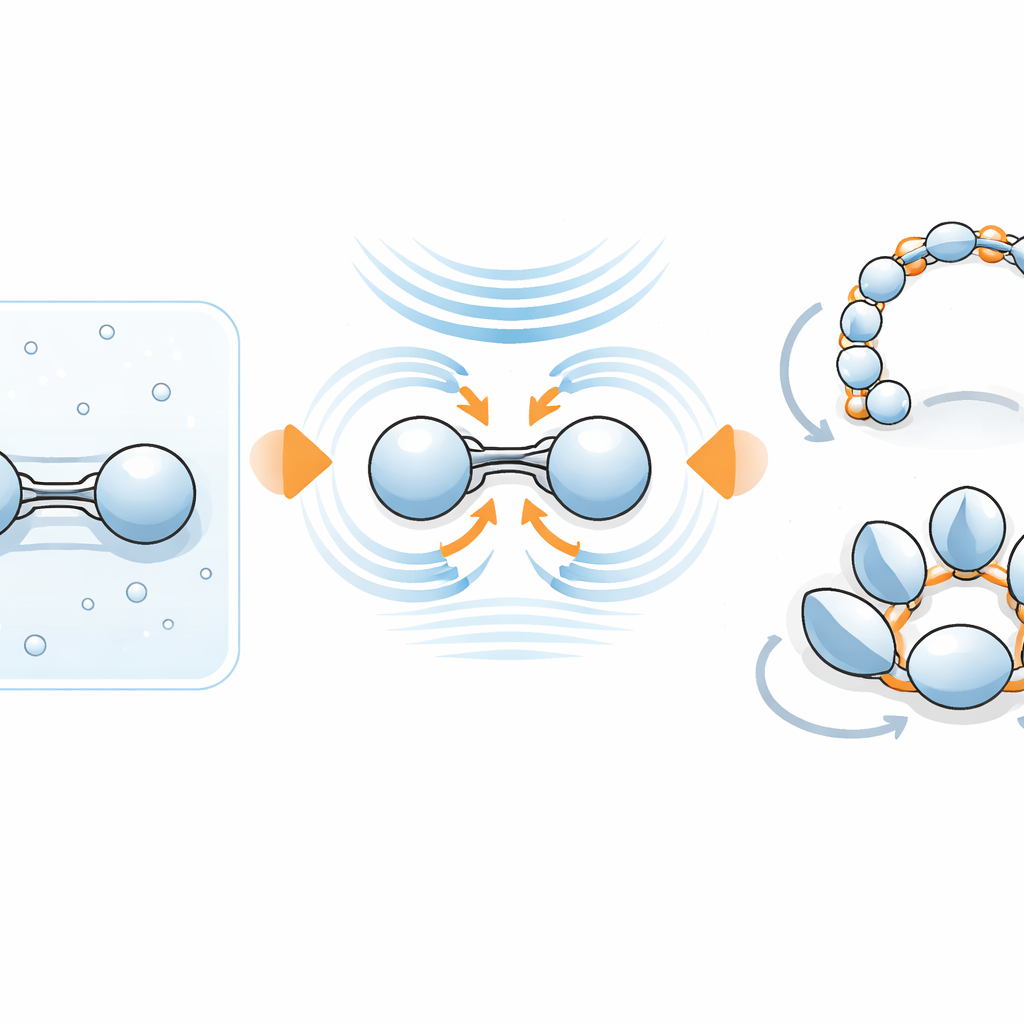
Les ultrasons offrent une alternative prometteuse. Ils traversent les fluides et les tissus, sont relativement sûrs, et peuvent être générés et activés avec une grande précision. Les chercheurs ont conçu des « micromachines acoustiques à morphing » constituées de deux petites bulles piégées reliées par une charnière souple et encadrées par une armature plus rigide. Lorsqu’un champ ultrasonore traverse le liquide environnant, les bulles pulsent et interagissent, s’attirant mutuellement et courbant la charnière. En modulant l’intensité du signal acoustique, l’équipe peut ajuster de façon continue l’amplitude et la vitesse du pliage de la micromachine : les transformations complètes prennent seulement quelques millisecondes et l’objet reprend sa forme initiale quand le son cesse.
Concevoir de minuscules charnières qui obéissent à un plan
Pour transformer une simple unité à deux bulles en machines utiles, les auteurs ont mappé chaque unité sur quelque chose comme une articulation dans un bras robotique. Ils ont varié systématiquement la longueur et la largeur des charnières, montrant que des charnières plus fines et plus longues se plient plus facilement et à des angles plus importants, tandis que des charnières trop longues inversent leur comportement lorsque les forces fluides changent de direction. En utilisant un langage mathématique standard de la robotique, ils ont traité chaque module comme une articulation programmable avec une rotation et une position définies. En enchaînant de nombreuses unités et en assignant des angles de pliage spécifiques, ils ont pu résoudre à la fois le problème « direct » (quelle forme résulte d’un schéma donné d’articulations) et le problème « inverse » (comment choisir les angles d’articulation pour atteindre un contour final souhaité), le tout de manière compacte et analytique.
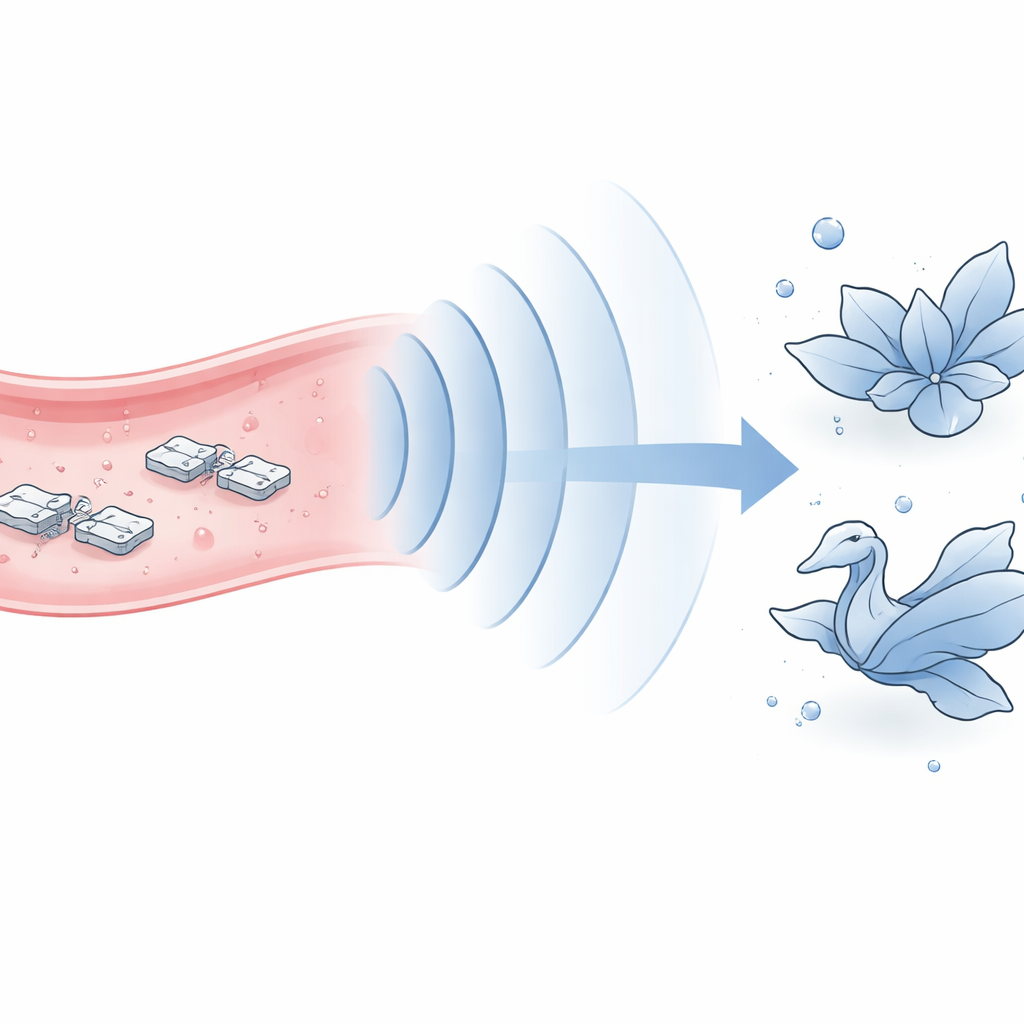
Des chaînes et des lettres aux minuscules fleurs et oiseaux
Avec ces règles en main, l’équipe a assemblé des structures plus longues capables de se transformer entre des formes très différentes. Des chaînes plates se sont enroulées en arcs, rouleaux, ondulations et motifs en nid d’abeille sous ultrasons, puis se sont détendues quand le son a été coupé. Ils ont même codé de simples lettres le long d’une chaîne en assignant des angles cibles différents à divers segments, stockant ainsi de l’information dans la façon dont la micromachine se replie. En allant en trois dimensions, ils ont construit un « microlotus » dont les pétales pouvaient s’ouvrir et se fermer rapidement comme une vraie fleur, maintenant n’importe quelle position intermédiaire tant que l’intensité ultrasonore était maintenue et résistant à de légères pressions d’une sonde. Une autre conception, un « micro‑oiseau » de type origami, a reconfiguré sa tête, ses ailes et sa queue en poses distinctes analogues au battement, au décollage, au virage et au stationnaire, simplement en modifiant la façon dont différents modules de charnière se pliaient sous l’effet du son.
Ce que cela pourrait signifier pour les microrobots de demain
En termes simples, ce travail montre comment construire des dispositifs microscopiques qui se comportent comme de petits transformeurs mécaniques, se remodelant rapidement et de façon répétée lorsqu’ils sont baignés d’ultrasons. Parce que les ondes sonores se propagent bien dans les liquides et les tissus mous, ces micromachines pourraient à terme aider à diriger des médicaments, piéger des particules ou adapter le comportement de robots souples au sein du corps. Elles pourraient aussi servir de blocs de construction pour des matériaux intelligents et des composants électroniques flexibles qui changent de structure sur commande. Bien que des défis subsistent—comme un contrôle de force plus précis et une assemblée à grande échelle—l’étude trace une feuille de route claire pour utiliser le son afin de programmer la forme à l’échelle microscopique.
Citation: Su, X., Wang, L., Wang, Z. et al. Acoustic shape-morphing micromachines. Nat Commun 17, 2238 (2026). https://doi.org/10.1038/s41467-026-68856-9
Mots-clés: microrobots, activation par ultrasons, morphing de forme, micro‑dispositifs souples, microfluidique