Clear Sky Science · fr
Électrodes à base d'hydrogel pour l'acquisition sEMG haute fidélité et le contrôle d'une main robotique
Écouter les muscles pour faire bouger les machines
Imaginez contrôler une main robotique simplement en contractant vos propres muscles. Pour les personnes ayant perdu l'usage de la main, ou pour des travailleurs nécessitant une assistance robotique précise, ce lien sans effort entre le corps et la machine pourrait transformer la vie. Mais les électrodes métalliques autocollantes d'aujourd'hui sont rigides, peuvent irriter la peau et produisent souvent des mesures électriques bruitées. Cet article présente une électrode douce et compatible avec la peau, « gélatineuse », qui épouse le corps, capte plus clairement les signaux musculaires faibles et les utilise pour piloter une main robotique réaliste.
Un patch souple qui ressemble à la peau
Les chercheurs ont conçu un nouvel hydrogel — un matériau élastique et riche en eau, semblable aux lentilles de contact — pour servir d'électrode sur la peau. Ils ont combiné des composants courants utilisés dans les plastiques avec des additifs naturels tels que la chitosane (dérivée de crustacés) et l'acide tannique (présent dans les végétaux), ainsi que du glycérol et des sels simples. Ensemble, ces ingrédients forment un réseau extensible conducteur d'ions capable de transporter des charges électriques tout en restant doux et humide contre la peau. En ajustant précisément les proportions de chaque composant, l'équipe a obtenu une version pouvant s'étirer plus de douze fois sa longueur initiale sans se rompre tout en conservant des performances électriques fiables.
Résistant, adhésif et capable de se réparer
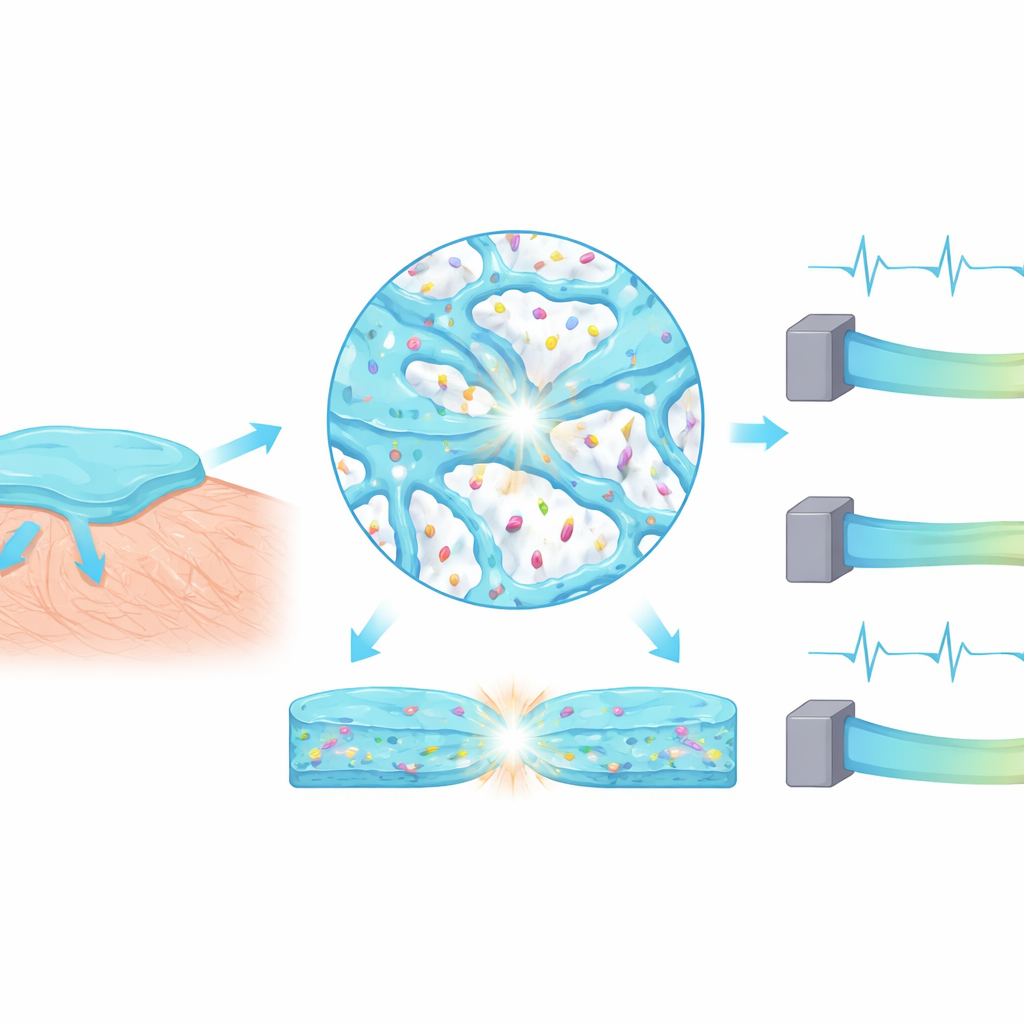
Pour fonctionner sur un bras ou une main en mouvement, une électrode doit rester en place, résister aux flexions et aux tractions, et continuer à fonctionner après des dommages mineurs. Le nouvel hydrogel excelle dans ces trois domaines. Au microscope, il présente une structure dense, semblable à une éponge, formée par de nombreuses liaisons faibles entre ses molécules. Ces liaisons agissent comme des amortisseurs, permettant au matériau de s'étirer, se tordre et se comprimer tout en reprenant sa forme. Elles permettent aussi à des morceaux coupés de gel de se reconnecter avec le temps ; lorsque l'équipe a tranché un échantillon en deux et pressé les morceaux ensemble, il a progressivement cicatrisé et a retrouvé presque toute sa conductivité électrique initiale. Par ailleurs, des groupes chimiques dans l'acide tannique confèrent au gel une forte adhérence à de nombreuses surfaces, du plastique et des métaux à de la peau de cochon et de la peau humaine, et cette adhésivité reste efficace même après des dizaines de cycles d'attachement et de décollage.
Des signaux plus propres provenant des muscles en activité
L'étape suivante a consisté à vérifier la capacité du gel souple à capter les signaux d'électromyographie de surface (sEMG) — les faibles tensions générées par les muscles juste sous la peau. Les chercheurs ont fixé des électrodes en hydrogel sur les avant-bras de volontaires et les ont comparées à des tampons commerciaux argent/argent-chlorure de taille équivalente. Lors d'exercices simples comme serrer et relâcher le poing, les deux types d'électrodes ont enregistré des formes d'onde nettes, mais l'hydrogel a fourni un rapport signal/bruit nettement supérieur. Concrètement, cela signifie que les signaux musculaires souhaités se détachaient plus clairement du bruit électrique de fond, et les enregistrements restaient plus stables lorsque les électrodes étaient déplacées ou réutilisées. Même après des repositionnements répétés ou des découpes suivies d'auto-réparation, les patchs en hydrogel ont continué à capter des signaux de haute qualité, surpassant les tampons rigides à base de métal.
Apprendre à une main robotique à lire les gestes
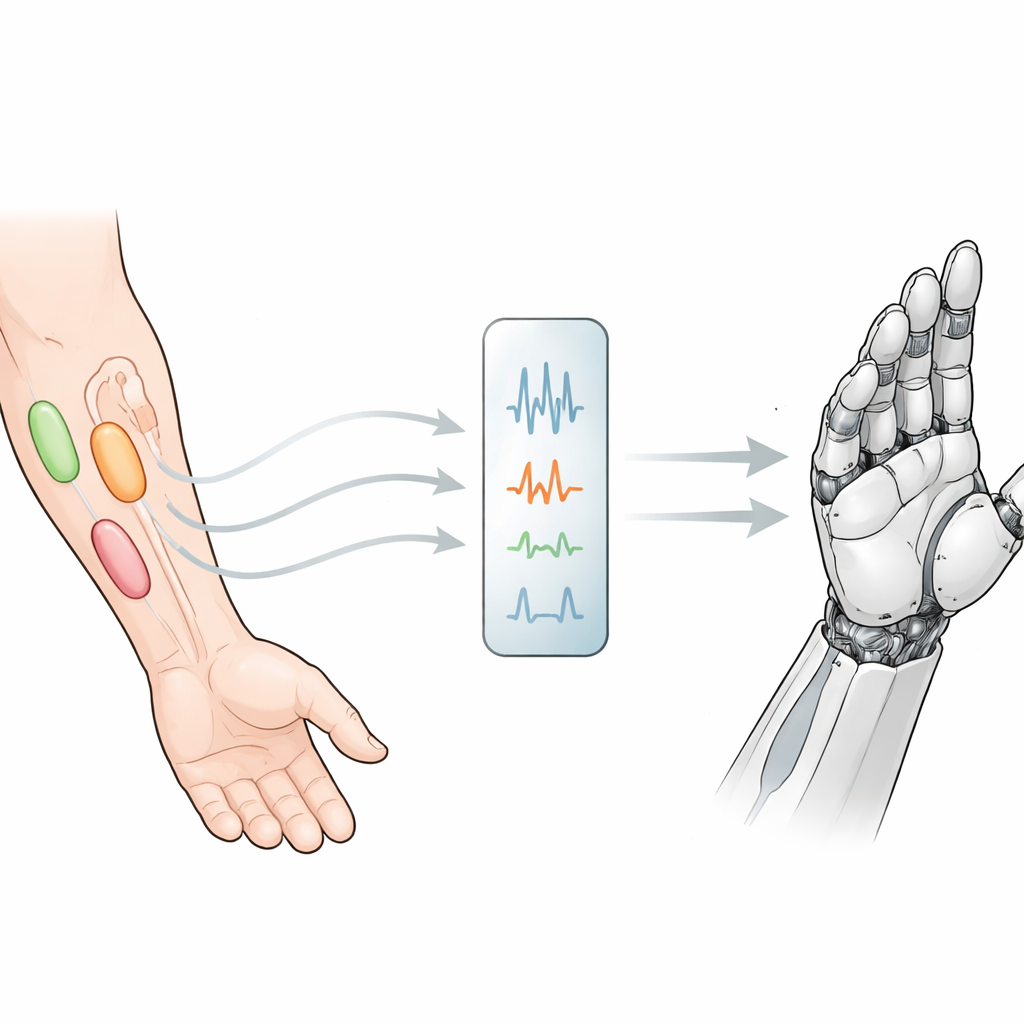
Avec des signaux musculaires plus propres, l'équipe a construit un système complet qui transforme ces signaux en gestes de la main distincts. Ils ont placé des électrodes intégrées en hydrogel sur les muscles fléchisseurs et extenseurs de l'avant-bras et enregistré les motifs électriques pendant que des volontaires effectuaient cinq gestes courants, comme le signe « OK », le pouce levé, la main ouverte, le pointage et le poing serré. À partir de ces enregistrements, les chercheurs ont extrait des caractéristiques statistiques simples — la puissance, la stabilité et la vitesse de variation des signaux — et les ont introduites dans un modèle informatique. Ils ont utilisé un algorithme combinant un réseau neuronal à apprentissage rapide avec une méthode d'optimisation inspirée des oiseaux en essaim. Ce duo a permis au système d'apprendre rapidement quelles configurations musculaires correspondent à quel geste avec une grande précision.
De commandes proches de la pensée au mouvement réel
Enfin, l'équipe a relié son logiciel de reconnaissance à une main robotique biomimétique. Lorsqu'un volontaire formait l'un des gestes entraînés, les électrodes en hydrogel capturaient les signaux sEMG, l'algorithme identifiait le geste intentionnel et la main robotique reproduisait le mouvement en temps réel. Sur de nombreux essais, le système a correctement classé les gestes dans plus de 94 % des cas, bien qu'il repose uniquement sur un petit ensemble de caractéristiques de signal simples. Pour le grand public, la conclusion est claire : un patch gélifié, auto-réparant et adhésif peut écouter l'activité musculaire à travers la peau de manière plus confortable et plus nette que les tampons métalliques conventionnels, permettant un contrôle fiable de robots d'assistance. Cette approche pourrait soutenir de futures mains prothétiques, des outils de rééducation et des dispositifs portables réactifs au langage électrique naturel du corps.
Citation: Yu, Z., Gu, Y., Ren, Y. et al. Hydrogel-based electrodes for high-fidelity sEMG acquisition and robotic hand control. Microsyst Nanoeng 12, 107 (2026). https://doi.org/10.1038/s41378-026-01219-y
Mots-clés: électrodes en hydrogel, électromyographie de surface, capteurs portables, reconnaissance de gestes, contrôle de main robotique