Clear Sky Science · fr
Un robot à l’échelle d’un insecte à jambes parallèles basé sur un mécanisme origami intégrant actionneur et structure
Petits robots pour espaces étroits
Imaginez un robot de sauvetage suffisamment petit et léger pour se faufiler à travers une fissure dans un mur, ramper le long d’un tuyau étroit ou même traverser une flaque d’eau. Cet article présente une telle machine : un robot de la taille d’une paume, ressemblant à un insecte, appelé PLioBot, fabriqué à partir d’une seule feuille pliée, se déplaçant très vite pour sa taille et capable d’affronter de nombreux types de terrains accidentés. Les chercheurs montrent comment combiner des pliages ingénieux avec de minuscules moteurs vibrants pour transformer des matériaux plats en explorateurs agiles pour les endroits exigus et difficiles d’accès.
De la feuille plate au rampant à quatre pattes
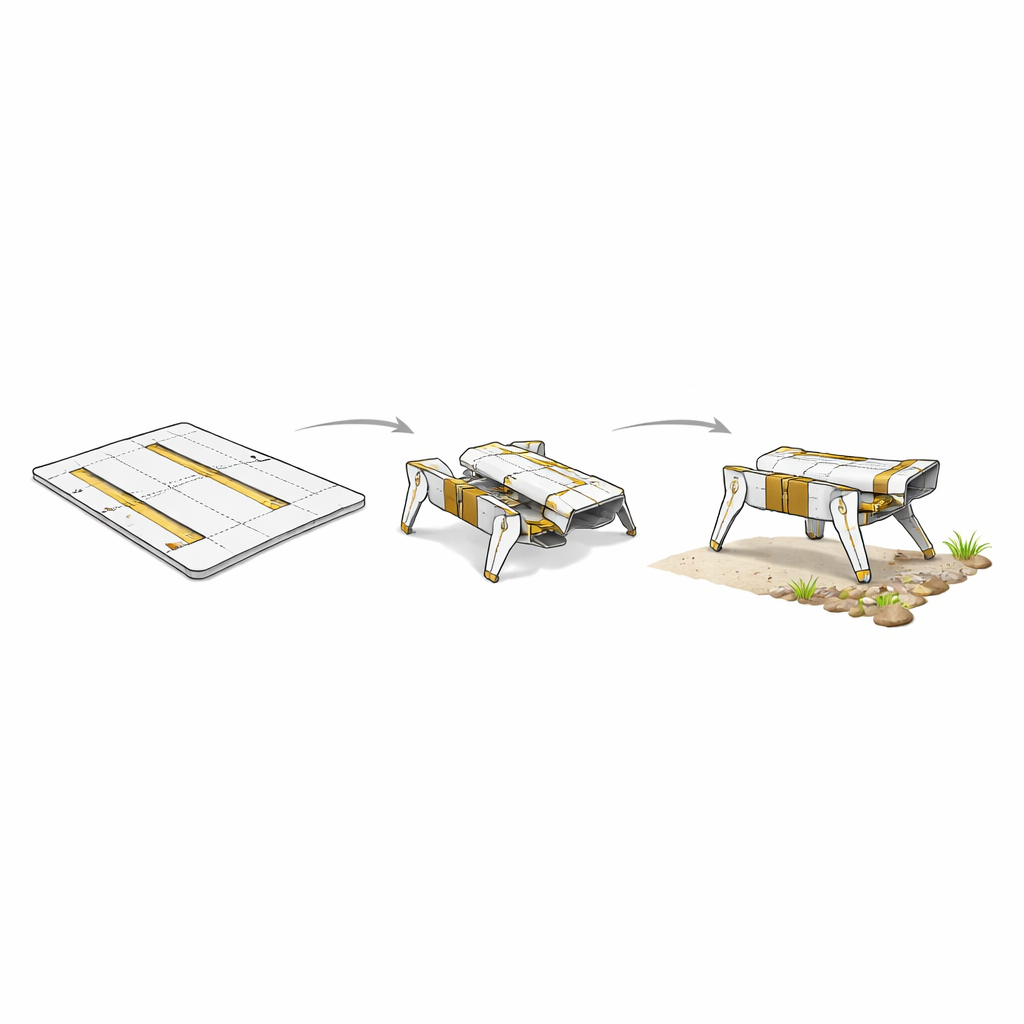
PLioBot commence sa vie comme un patron plat, un peu comme un jouet en papier découpé et plié. Au lieu de papier, le patron est un sandwich à cinq couches constitué de fibre de verre, de fibre de carbone, d’un film plastique flexible et de bandes de céramique piézoélectrique qui font office de muscles. Des zones amincies précisément placées dans la couche plastique servent de charnières. Après découpe laser, toute la structure est pliée suivant une séquence chorégraphiée de sorte que le corps, les quatre pattes et les huit actionneurs apparaissent à partir d’une seule pièce continue. Pas de vis, pas de moteurs séparés et pas d’alignement manuel requis — le pliage seul produit un robot complet d’environ 2,5 centimètres de long et ne pesant que 1,2 gramme.
Comment de petites pattes réalisent de grandes enjambées
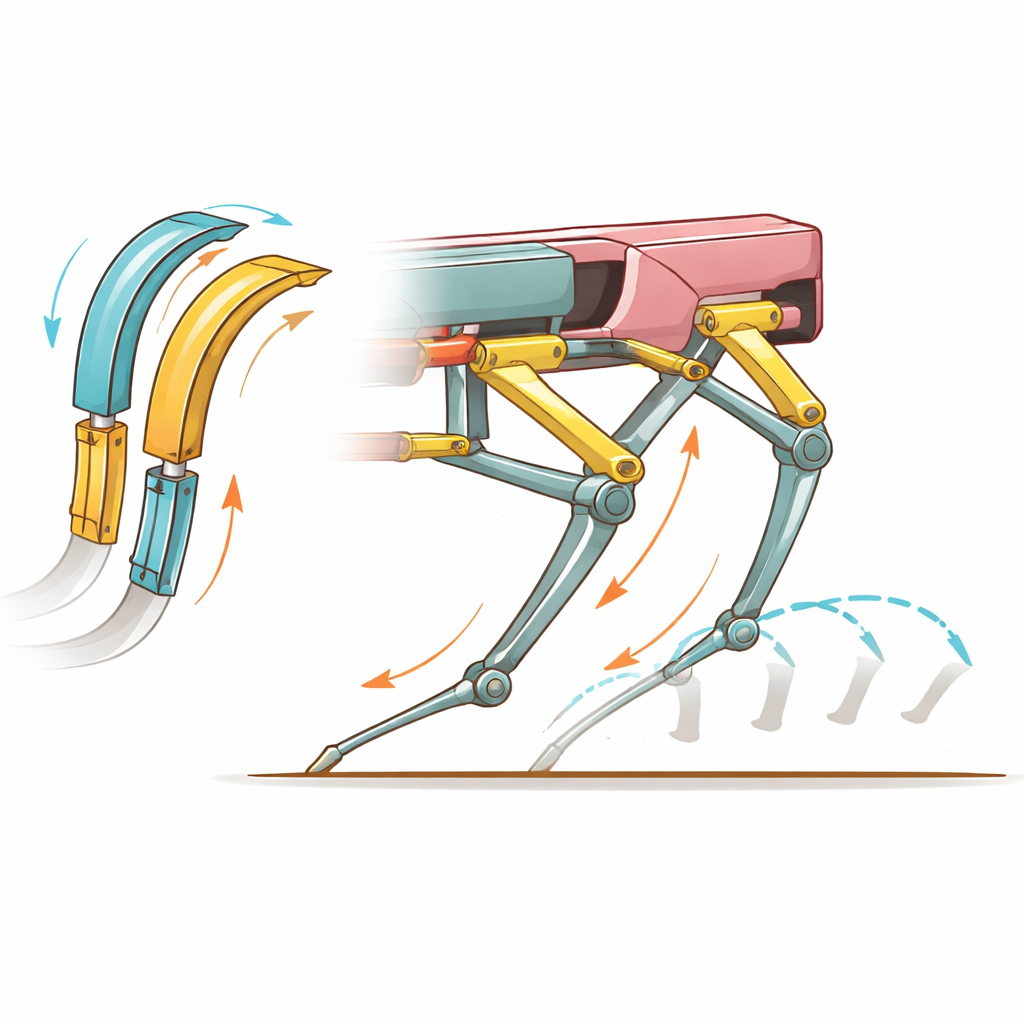
Le mouvement du robot provient des céramiques piézoélectriques — des matériaux qui se déforment légèrement lorsqu’une tension électrique leur est appliquée. Chaque côté de PLioBot porte une paire d’actionneurs en bande « jumelés ». Lorsque des tensions alternatives font osciller ces bandes, leur mouvement est transmis via un ensemble d’éléments articulés qui fonctionnent comme un mécanisme de jambe parallèle miniature. En synchronisant finement les signaux, chaque patte peut se lever et s’abaisser ainsi qu’avancer et reculer, traçant une trajectoire bouclée avec son pied. La coordination des quatre pattes selon un motif de type trot permet au robot de pousser efficacement contre le sol et de filer en avant. Dans ses meilleurs réglages, PLioBot atteint 44,6 centimètres par seconde — soit environ 18 longueurs de corps par seconde — ce qui en fait l’un des robots à pattes les plus rapides à cette échelle.
Muscles intégrés, moins de tracas d’assemblage
La plupart des robots à l’échelle d’un insecte sont assemblés laborieusement à partir de nombreuses petites pièces : moteurs ou actionneurs séparés, cadres et liaisons qui doivent tous être alignés à la main. Cela augmente les coûts, limite la précision et complique la production de masse. Les auteurs s’attaquent à ce problème en intégrant complètement la structure et l’actionnement dans un seul « mécanisme origami ». Ils utilisent un procédé de stratification amélioré dans lequel toutes les couches — peaux rigides en fibre de verre, électrodes en fibre de carbone orthogonales, film de charnière flexible et bandes de céramique — sont découpées, empilées, alignées à l’aide d’orifices de centrage, puis pressées à chaud avant que le contour final ne soit découpé au laser. Le résultat est une pièce plate robuste qui contient déjà le squelette, les articulations et les muscles du robot à leurs positions finales, prête à être pliée en forme.
Marcher, grimper et nager sur des terrains réels
Pour vérifier si leur conception est utile en dehors du banc d’essai, l’équipe a soumis PLioBot à une variété d’obstacles du quotidien. Sur du verre lisse il risque de glisser, mais il se déplace encore rapidement ; sur une éponge et de l’acrylique il gagne en adhérence au prix d’une légère perte de vitesse. Il grimpe des rampes jusqu’à 12 degrés et peut transporter des charges plus lourdes que lui — jusqu’à 1,7 gramme, avec des performances particulièrement bonnes en dessous d’environ 0,8 gramme. Dans des tunnels étroits de seulement 3 centimètres de large et moins de 3 centimètres de haut, le robot transporte une charge de 1,4 gramme tout en maintenant plusieurs longueurs de corps par seconde. En remplaçant les semelles par des plots hémisphériques ou des volets en forme de nageoires, PLioBot traverse le gravier et l’herbe, franchit du sable mouvant sans s’enfoncer, marche au fond d’un bac et nage même à la surface de l’eau en utilisant uniquement ses palettes pour la poussée.
Ce que cela signifie pour les futurs petits explorateurs
En termes simples, ce travail montre qu’il est possible d’imprimer et de plier un très petit robot dont le corps et les muscles forment une seule pièce, et que ce robot peut se déplacer rapidement et affronter de nombreuses surfaces réelles et imparfaites. PLioBot dépend encore de fils d’alimentation externes, il n’est donc pas encore entièrement autonome. Mais la conception origami intégrée et la méthode de fabrication ouvrent la voie à un avenir où de grands nombres de robots peu coûteux à l’échelle d’un insecte pourraient être produits comme des pièces plates, pliés en forme et équipés de petites batteries et de circuits de contrôle. De tels essaims pourraient un jour explorer des bâtiments endommagés, inspecter des tuyaux industriels ou explorer d’autres planètes — en partant tous d’un élément qui ressemble, au premier abord, à une feuille astucieusement découpée.
Citation: Zhu, Q., Jiang, T., Luo, Z. et al. A parallel-legged insect-scale robot based on actuation-structure integrated origami mechanism. Microsyst Nanoeng 12, 92 (2026). https://doi.org/10.1038/s41378-026-01205-4
Mots-clés: robots à l’échelle d’un insecte, robotique origami, actionneurs piézoélectriques, locomotion adaptative au terrain, fabrication de micro‑robots