Clear Sky Science · fr
Actionneurs en alliage à mémoire de forme en fil : modélisation, conception et contrôle
Des fils métalliques qui « se souviennent » de leur forme
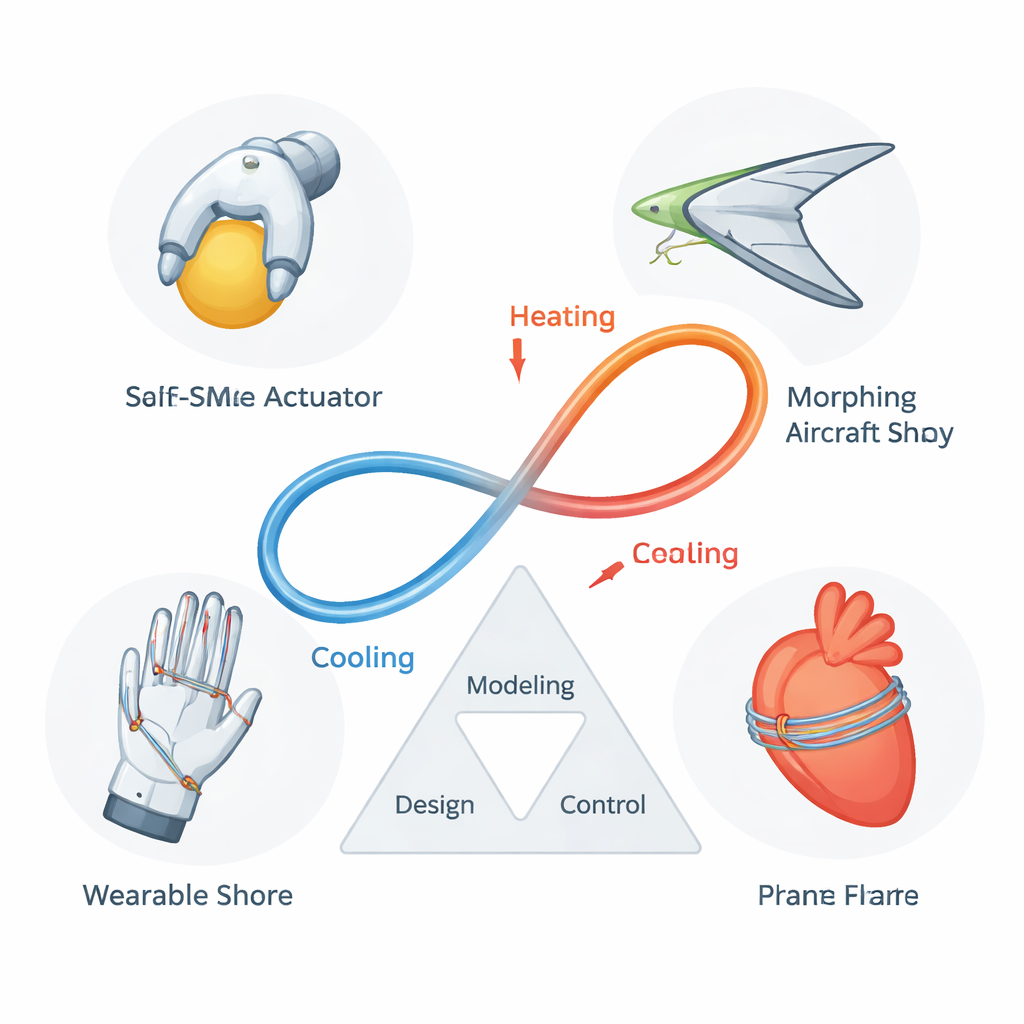
Imaginez un fil métallique fin qui peut tirer comme un muscle, plier discrètement le doigt d’un robot, remodeler l’aile d’un avion en vol ou comprimer délicatement un cœur défaillant — simplement en étant chauffé puis refroidi. Cet article de synthèse examine ces fils, fabriqués à partir d’alliages à mémoire de forme (AMF), et explique leur fonctionnement, la manière dont les ingénieurs les conçoivent et les pilotent, ainsi que leurs usages concrets en robotique, aéronautique, dispositifs médicaux et technologies portables.
Comment prennent vie les fils métalliques intelligents
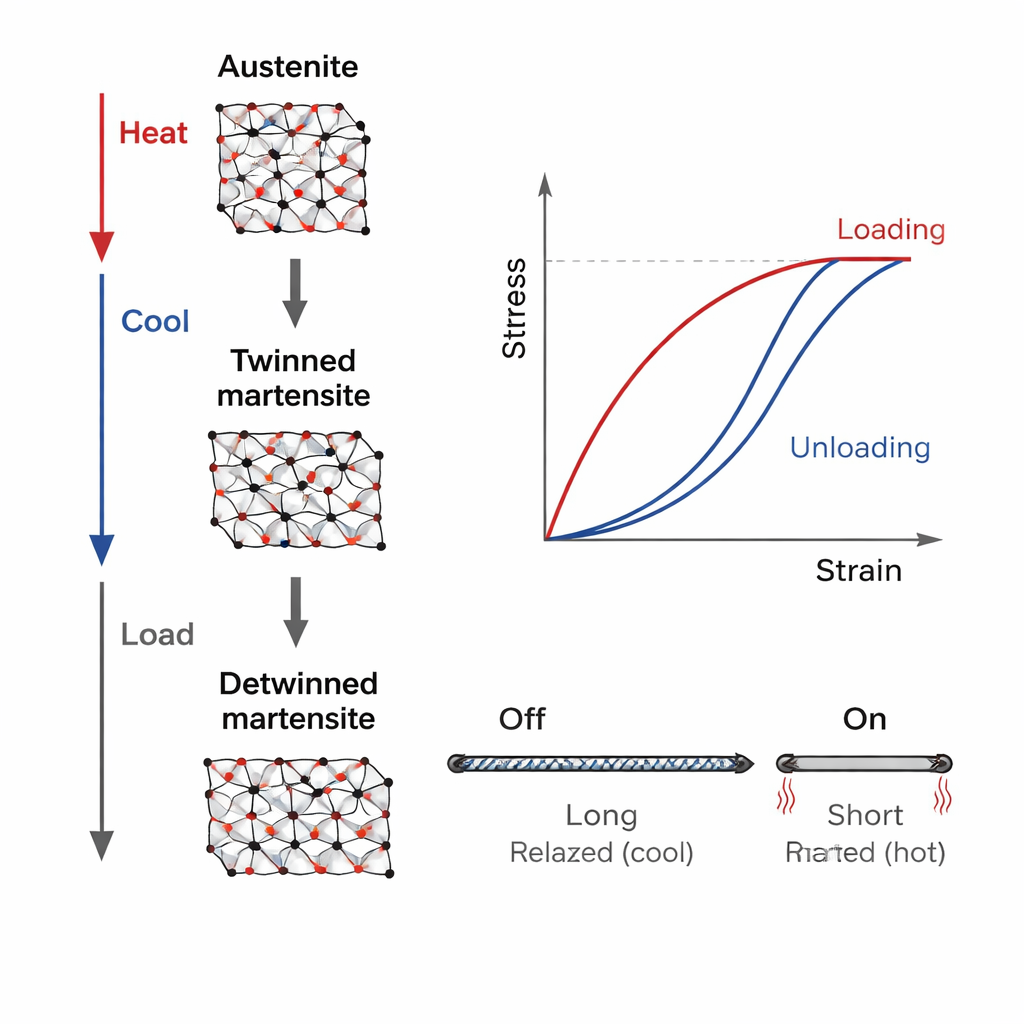
Les alliages à mémoire de forme sont des métaux particuliers qui peuvent être déformés puis retrouver une forme préprogrammée en fonction de la température. Dans un mode, appelé effet mémoire de forme, on peut plier le fil lorsqu’il est froid et relativement malléable ; chauffé, il revient brusquement à sa forme d’origine. Dans un autre mode, la superélasticité, l’alliage peut s’étirer sous charge puis reprendre sa forme une fois la charge supprimée. Ce comportement provient de transformations de phase solide–solide entre différentes structures cristallines, ce qui rend la réponse fortement non linéaire et parfois difficile à prévoir. Comme les fils AMF sont fins, les ingénieurs les traitent généralement comme des éléments unidimensionnels, ce qui simplifie les modèles mathématiques décrivant les liens entre température, contrainte, déformation et courant électrique.
Des équations aux modèles pilotés par les données
Pour utiliser ces fils intelligents de manière fiable, les concepteurs ont besoin de modèles qui prédisent la force qu’ils peuvent exercer, l’amplitude de leur déplacement, leur élévation de température et l’évolution de leur résistance électrique. Les modèles « constitutifs » classiques considèrent le fil comme un matériau massif et suivent comment ses phases internes changent avec la contrainte et la température. Ces modèles sont efficaces mais reposent sur des hypothèses simplificatrices. Parallèlement, les chercheurs utilisent de plus en plus l’apprentissage automatique et les réseaux de neurones pour apprendre directement le comportement du fil à partir de données expérimentales, capturant des effets d’hystérésis et d’histoire subtils. Une autre voie importante étudie l’évolution de la résistance électrique et de la température du fil lors du chauffage par courant, permettant l’auto-capteurs — la capacité d’estimer la force ou le mouvement simplement en mesurant la résistance, sans ajouter de capteurs externes.
Construire le mouvement : charges simples, structures souples et muscles artificiels
Sur le plan matériel, l’article organise les actionneurs à fils AMF selon leur manière d’être chargés. Dans les montages les plus simples à « charge linéaire », un fil tire contre un ressort ou un poids pour piloter des pinces ou des mécanismes de largage spatiaux. Les systèmes à « charge non linéaire » plus avancés intègrent des fils dans des poutres flexibles, des polymères souples, des textiles ou des structures type origami pour obtenir de grands mouvements de flexion, des robots rampants et des gants exosquelettes tissés. Les configurations différentielles utilisent deux fils opposés ou plus, mimant des paires de muscles comme biceps et triceps, pour fournir des mouvements rapides et réversibles dans des articulations telles que des coudes et des chevilles artificiels. Parce qu’un fil AMF ne peut se raccourcir que d’environ 8 %, un enjeu majeur de conception est l’amplification de course : enrouler de longs fils autour de poulies, les disposer en trajectoires courbes, utiliser des modules glissants ou rotatifs, ou adopter des ressorts AMF pour obtenir des déplacements plus importants dans des espaces contraints.
Apprendre aux fils intelligents à obéir
Le contrôle de ces actionneurs est délicat car leur réponse dépend à la fois de la température et de l’histoire mécanique. L’article passe en revue un éventail de stratégies de contrôle, des régulateurs PID classiques à des schémas plus sophistiqués. Les approches basées sur des modèles utilisent des équations issues de la physique ou des modèles d’hystérésis pour concevoir des régulateurs en mode glissant et des compensateurs en prédiction qui contrent la non-linéarité. Les contrôleurs par réseaux de neurones et par apprentissage par renforcement vont plus loin, apprenant à piloter le fil pour obtenir un mouvement précis sans dépendre de modèles parfaits. Parallèlement, les méthodes de contrôle auto-capteurs exploitent la variation de résistance du fil comme signal de rétroaction intégré, parfois combinées à des réseaux de neurones, pour estimer position ou force sans capteurs externes encombrants.
Applications réelles et pistes futures
Les actionneurs en fil AMF alimentent déjà des pinces robotiques souples, de petits robots rampants, des ailes d’avion morphing, des dispositifs de largage pour satellites, des pompes et stents implantables, des enveloppes d’assistance cardiaque, des vêtements de compression, des combinaisons exosquelettes et des gants de rééducation. Dans tous ces domaines, des défis communs persistent : refroidissement lent et accumulation de chaleur, fatigue après de nombreux cycles, complexité du contrôle et coût de fabrication. Les auteurs soutiennent que les progrès dépendront de l’intégration de trois axes : de meilleurs modèles multi-échelles et enrichis par les données, des conceptions structurelles plus intelligentes combinant AMF avec électroniques flexibles et matériaux multifonctionnels, et des stratégies de contrôle adaptatives en ligne. Ils envisagent des cadres unifiés « modélisation–conception–contrôle », soutenus par des jumeaux numériques et l’apprentissage automatique, capables de co-optimiser ces aspects. Pour un lecteur non spécialiste, le message est que ces fils capables de changer de forme mûrissent, passant de curiosités de laboratoire à des muscles artificiels pratiques, avec le potentiel de remodeler discrètement machines, dispositifs médicaux et systèmes portables dans les années à venir.
Citation: Zhang, R., Yue, H., Sun, H. et al. Wire-form shape memory alloy actuators: modeling, design, and control. Microsyst Nanoeng 12, 76 (2026). https://doi.org/10.1038/s41378-026-01161-z
Mots-clés: alliage à mémoire de forme, robotique souple, actionneurs intelligents, structures morphing, dispositifs portables