Clear Sky Science · es
Mapeo probabilístico de ocupación inspirado en el cerebro con arquitecturas simbólicas vectoriales
Robots que ven el mundo como un mosaico
Cada coche autónomo, robot de almacén o aspiradora doméstica necesita una imagen mental rápida de su entorno: qué es sólido, qué está libre y qué sigue siendo desconocido. Este artículo presenta una nueva forma para que los robots construyan esa imagen —llamada mapa de cuadrícula de ocupación— que toma ideas de cómo podría representar la información el cerebro, con el objetivo de mantener los mapas precisos mientras los hace mucho más rápidos y eficientes de calcular.
Convertir pings de sensores en un mapa del mundo
Los robots suelen usar escáneres láser u otros sensores de distancia para sondear el mundo mientras se mueven, recolectando nubes de puntos sobre dónde están los objetos y dónde el espacio está libre. Una técnica clásica, el mapeo por cuadrícula de ocupación, divide el entorno en celdas diminutas, como píxeles en una pantalla, y asigna a cada una la probabilidad de estar ocupada. Los métodos tradicionales tratan esto como un problema estadístico pesado, siguiendo cuidadosamente la incertidumbre pero consumiendo mucho tiempo y memoria. Los métodos más recientes basados en redes neuronales son más rápidos y pueden rellenar huecos, pero se comportan como cajas negras, pueden ser difíciles de confiar en entornos críticos para la seguridad y, por lo general, deben reentrenarse para cada nuevo entorno.
Un camino intermedio inspirado en el cerebro
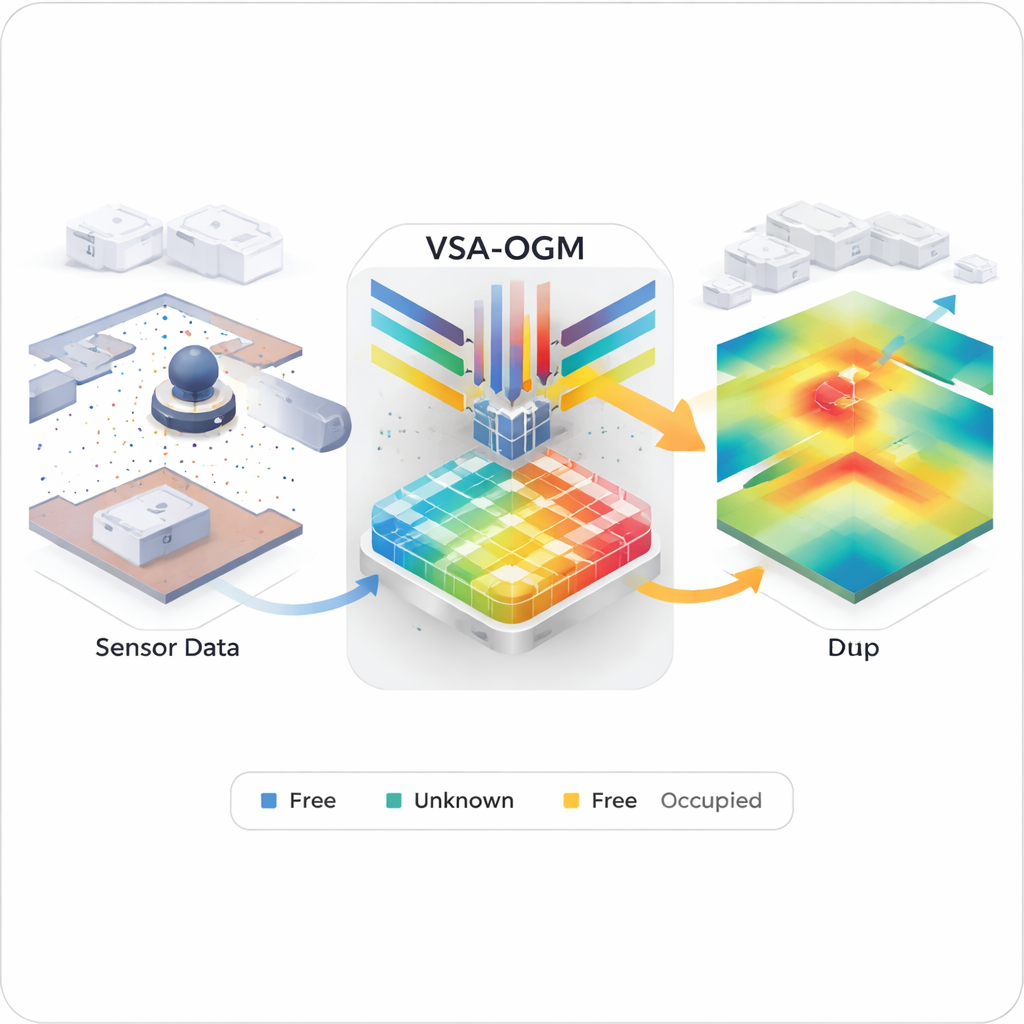
Los autores proponen un compromiso «neuro-simbólico» llamado VSA-OGM, siglas de Vector Symbolic Architecture Occupancy Grid Mapping. En lugar de almacenar cada detalle en una cuadrícula densa o enterrar la estructura dentro de millones de pesos de una red neuronal, el método codifica las lecturas del sensor como vectores muy largos en un espacio de alta dimensión —una idea matemática inspirada en teorías sobre cómo grupos de neuronas podrían representar conceptos y ubicaciones. El entorno se divide en mosaicos, y cada mosaico tiene memorias vectoriales para evidencias de «ocupado» y «vacío». A medida que el robot se desplaza y recoge nubes de puntos, cada observación se convierte en uno de estos vectores hiperdimensionales y se agrupa en la memoria del mosaico correspondiente, acumulando información con eficiencia a lo largo del tiempo.
De vectores ruidosos a mapas claros
Por supuesto, agrupar muchas señales en una sola memoria de alta dimensión corre el riesgo de crear una masa ruidosa y difícil de leer. VSA-OGM aborda esto con una tubería de decodificación cuidadosamente diseñada. Primero, compara las memorias de mosaico con vectores que representan posiciones en el espacio, produciendo «cuasi-probabilidades» aproximadas de ocupación. Luego aplica una serie de pasos no lineales y una herramienta de teoría de la información, la entropía de Shannon, para extraer dónde los datos apoyan de forma contundente una clase sobre la otra. Finalmente, usa una función softmax para convertir esas señales en probabilidades reales y las combina en un mapa final que muestra la diferencia con signo entre «ocupado» y «vacío». El resultado es una cuadrícula de ocupación suave que interpola a través de regiones con medidas escasas mientras sigue siendo completamente probabilística e interpretable.
Mapas más rápidos para un robot —o muchos
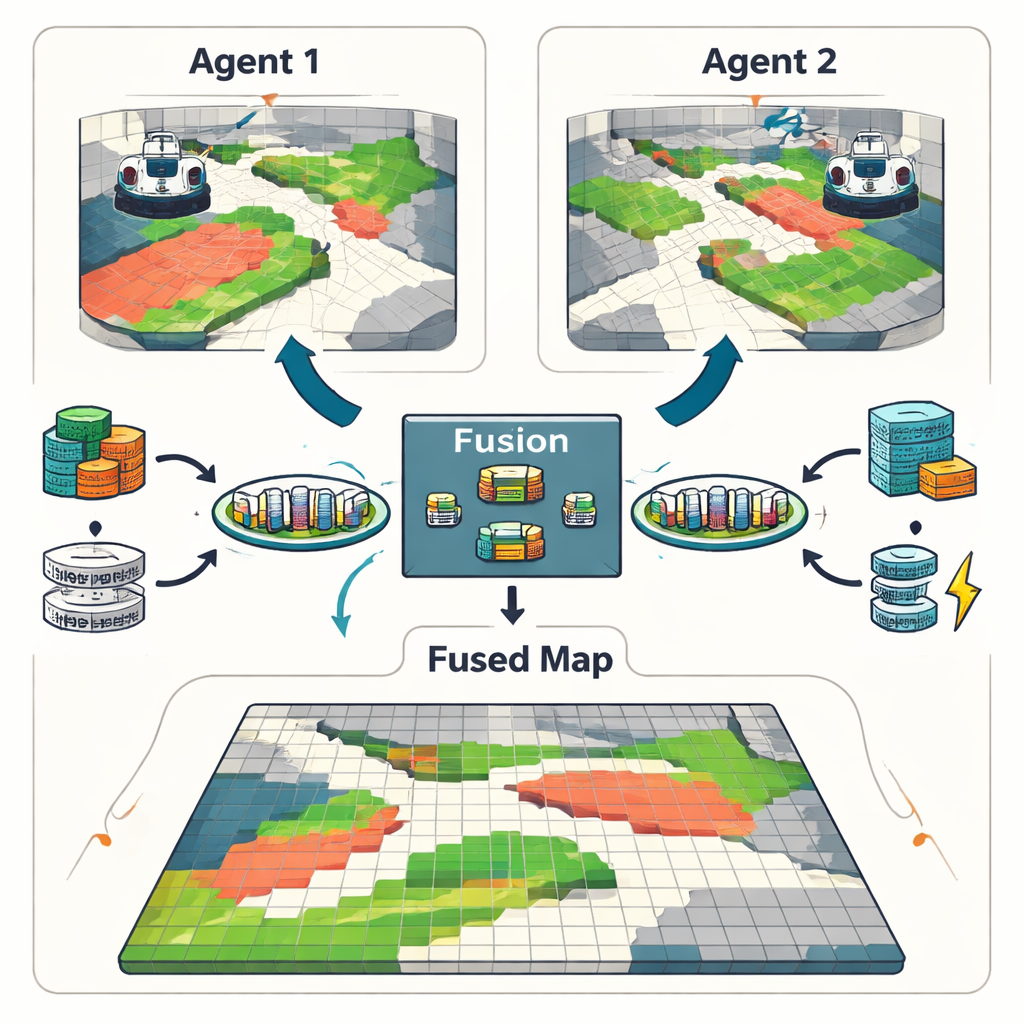
Para probar su enfoque, los investigadores ejecutaron VSA-OGM en varios conjuntos de datos simulados y reales, incluidos un mapa clásico de robot de interior y un escenario de conducción a gran escala. Frente a sólidos referentes tradicionales que modelan cuidadosamente las correlaciones espaciales, VSA-OGM logró una precisión de mapeo similar pero usó alrededor de 400 veces menos memoria y funcionó hasta 45 veces más rápido. En comparación con métodos tradicionales optimizados que descartan algún detalle estadístico, igualó la precisión mientras reducía la latencia en aproximadamente un factor de cinco. Evaluado frente a un sistema basado en red neuronal que requiere horas de entrenamiento y millones de parámetros, VSA-OGM ofreció una calidad de mapeo comparable sin preentrenamiento y redujo el tiempo de procesamiento por fotograma hasta seis veces. El marco también soporta múltiples robots: las memorias vectoriales de diferentes agentes pueden sumarse simplemente, produciendo mapas fusionados con poca pérdida de información.
Qué significa esto para los robots de cada día
En términos sencillos, este trabajo muestra que los robots no tienen que elegir entre matemáticas lentas pero fiables y redes neuronales rápidas pero opacas a la hora de construir mapas del mundo. Al usar vectores hiperdimensionales inspirados en el cerebro, VSA-OGM conserva la clara estructura probabilística de los métodos clásicos mientras alcanza la velocidad y la eficiencia necesarias para la operación en tiempo real con hardware limitado. Aún existen desafíos —como manejar datos extremadamente desiguales y entornos muy densos—, pero el enfoque apunta hacia robots futuros que puedan comprender su entorno de manera segura y fiable, incluso ejecutándose en ordenadores a bordo modestos.
Cita: Snyder, S., Capodieci, A., Gorsich, D. et al. Brain Inspired Probabilistic Occupancy Grid Mapping with Vector Symbolic Architectures. npj Unconv. Comput. 3, 13 (2026). https://doi.org/10.1038/s44335-026-00052-w
Palabras clave: mapeo de cuadrícula de ocupación, robots autónomos, arquitecturas simbólicas vectoriales, mapeo probabilístico, detección LiDAR