Clear Sky Science · es
Evidencia conductual de la ejecución jerárquica de movimientos secuenciales
Cómo nuestro cerebro convierte movimientos simples en acciones fluidas
Tareas cotidianas como teclear en un teclado, tocar una escala en el piano o alcanzar varios objetos sobre una mesa parecen sencillas. Sin embargo, detrás de esas acciones, el cerebro debe encadenar muchos movimientos pequeños para producir actos coordinados y suaves. Este estudio plantea una pregunta aparentemente simple: ¿planifica el cerebro siempre esas cadenas de acción como un único movimiento largo, o las construye paso a paso, usando una jerarquía oculta de bloques más pequeños?
Alcanzando objetivos grandes sobre una mesa
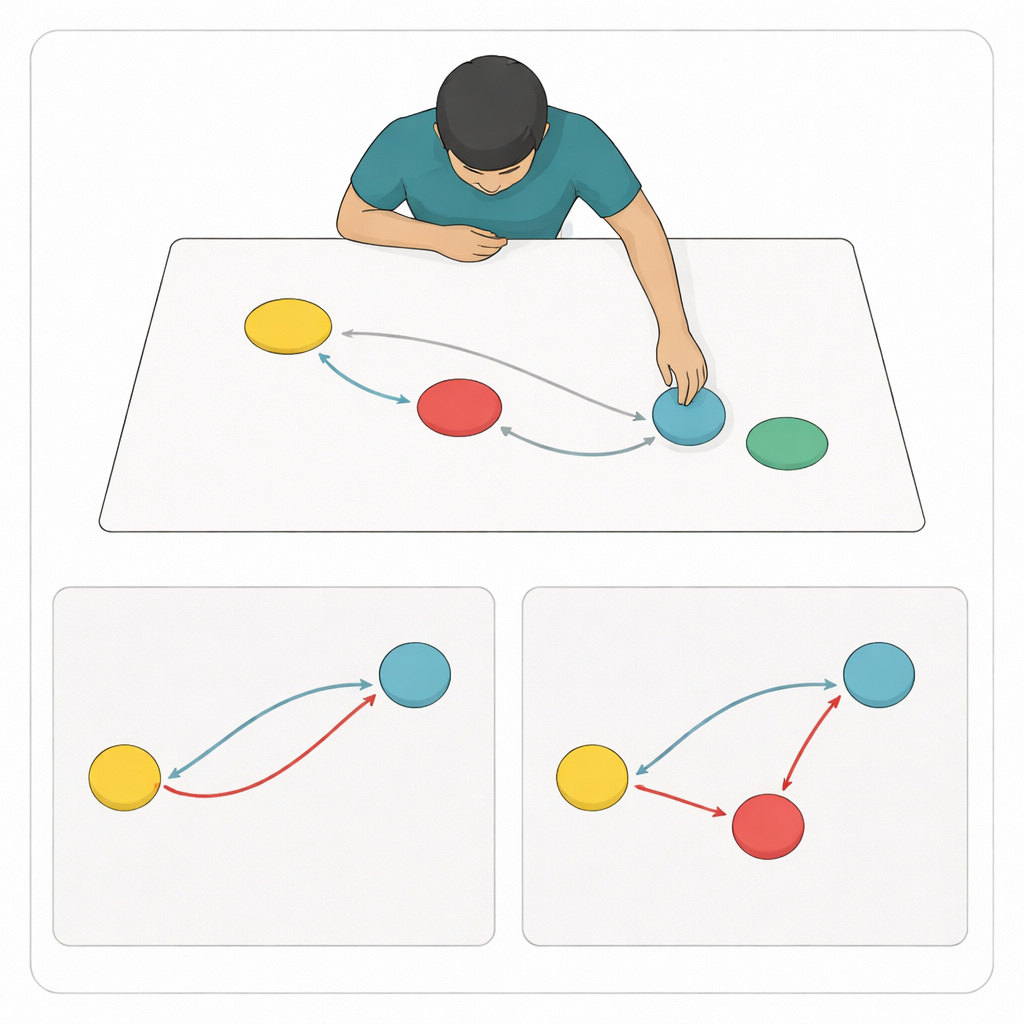
Para explorar esto, los investigadores diseñaron un juego de mesa tipo “conecta los puntos” para la mano. Veinte voluntarios se sentaron frente a una mesa con varios círculos de colores grandes impresos sobre la superficie. Un círculo inicial estaba cerca del cuerpo, y otros círculos se colocaban a la izquierda, a la derecha y por encima. En cada ensayo, los participantes escuchaban un sonido y debían mover la punta del índice desde el círculo de inicio a través de una breve secuencia de objetivos y volver, lo más rápido posible pero sin requerir una precisión extrema: bastaba con que la punta de los dedos cayera en cualquier lugar dentro de cada círculo. Esta configuración de baja precisión animó a las personas a moverse con rapidez y fluidez, permitiendo que sus trayectorias se doblaran y fusionaran entre objetivos en lugar de detenerse bruscamente en cada uno.
Leer planes ocultos en las curvas de la mano
En lugar de medir cuánto tardaban las personas o con qué frecuencia cometían errores, el equipo se centró en la forma exacta de cada trayectoria de la punta del dedo. Examinaron dos características clave. Primero, el “doblez intermedio”: cuánto la trayectoria hacia un objetivo se desviaba hacia el siguiente objetivo antes de alcanzarlo realmente. Segundo, el “giro alrededor de un objetivo”: cuán pronunciada o suave era la curva cuando la trayectoria pasaba cerca de un objetivo y cambiaba de dirección. En conjunto, estos patrones revelan si un movimiento hacia un objetivo ya está teniendo en cuenta el siguiente objetivo —un efecto llamado “coarticulación”, similar a cómo la boca prepara sonidos futuros al hablar. Los científicos compararon estas curvas medidas con las trayectorias producidas por dos modelos computacionales de planificación del movimiento, ambos basados en teorías establecidas de control óptimo pero con estructuras internas diferentes.
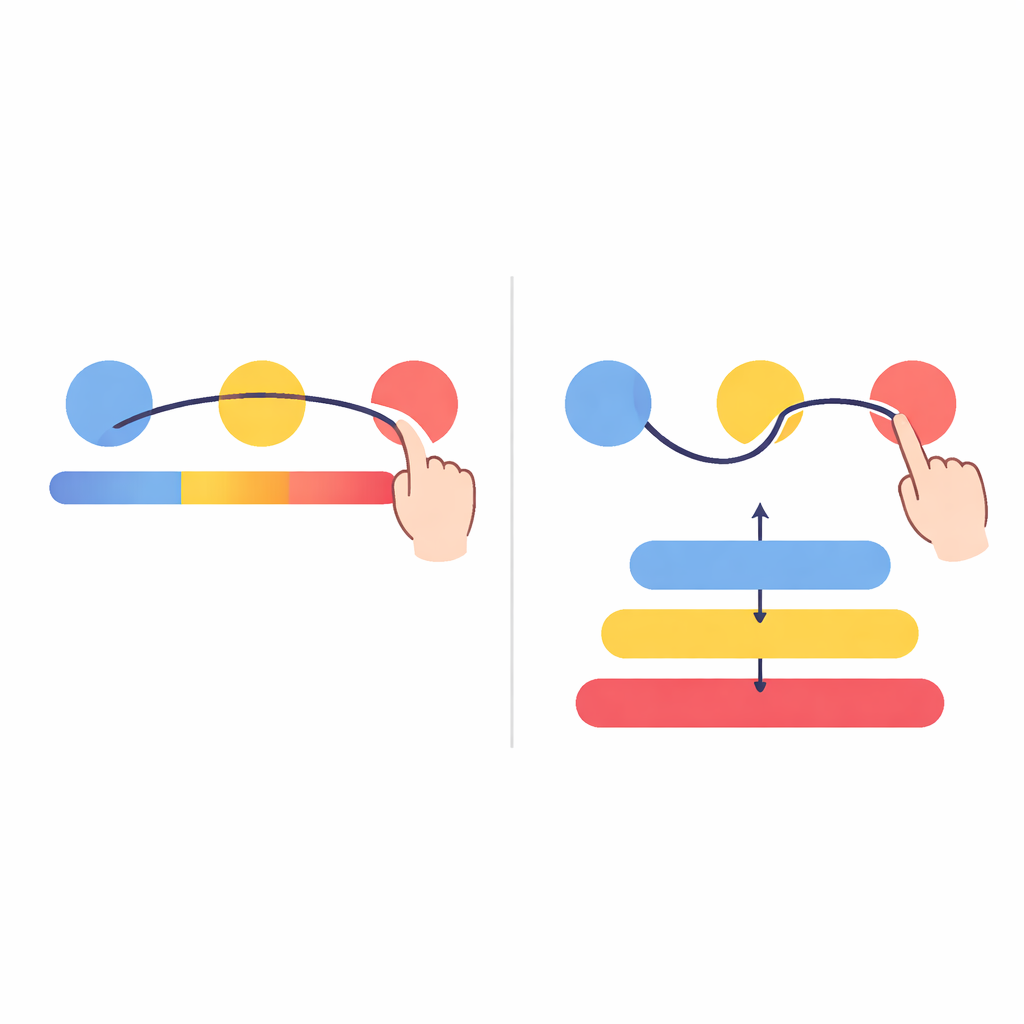
Planes planos frente a planes en capas
En el modelo “plano”, se imagina que el cerebro planifica toda la secuencia de tres objetivos como una única trayectoria unificada antes de que la mano comience a moverse. Esto se asemeja a un gesto completamente memorizado o un “bloque” ejecutado de una sola vez. En ese caso, el doblez intermedio y el giro alrededor de los objetivos están fuertemente vinculados: una vez que el planificador decide con qué intensidad apuntar al primer objetivo, queda en gran medida fijado cómo se verán las curvas a lo largo de toda la secuencia. El modelo “jerárquico”, en cambio, añade una capa intermedia sencilla que enlaza piezas más pequeñas —por ejemplo, un movimiento de dos objetivos seguido de un regreso a un objetivo único— sobre la marcha. Un sistema dinámico separado decide cuándo pasar de un submovimiento al siguiente, permitiendo que la forma alrededor de cada objetivo se ajuste de manera más independiente sin perder la suavidad global del movimiento.
Comportamiento que parece jerárquico
Cuando los investigadores ejecutaron numerosas simulaciones, hallaron que el modelo plano simplemente no podía generar algunas combinaciones de doblez intermedio y giros que los participantes humanos producían de forma natural. En particular, la gente a menudo mostraba un fuerte desplazamiento hacia el segundo objetivo en la primera parte del movimiento, pero aun así realizaba un giro pronunciado o con una forma distinta alrededor de ese segundo objetivo —patrones que el planificador plano no podía reproducir. El modelo jerárquico, sin embargo, pudo recrear estos comportamientos mixtos al vincular dinámicamente “submovimientos” separados en objetivos intermedios. Al comparar los datos reales con ambos modelos, los autores concluyeron que casi la mitad de todas las secuencias de movimiento registradas requerían claramente una explicación jerárquica, mientras que otras eran compatibles con la planificación plana, lo que sugiere que las personas alternan estrategias de forma flexible según la secuencia.
Qué significa esto para la destreza cotidiana
Los hallazgos sugieren que, incluso sin práctica prolongada o rutinas muy entrenadas, nuestro cerebro con frecuencia recurre a planes en capas al encadenar alcances simples. En lugar de comprimir siempre una secuencia en un único bloque rígido, el sistema motor parece mantener piezas de movimiento reutilizables y enlazarlas en tiempo real. Con el entrenamiento, esas cadenas pueden colapsar gradualmente en acciones más planas y completamente “agrupadas”, lo que ayuda a explicar cómo las habilidades se vuelven tan rápidas y automáticas. Este trabajo ofrece una nueva ventana basada en la geometría sobre cómo el cerebro organiza el movimiento, que podría orientar futuras investigaciones sobre el aprendizaje motor, la rehabilitación y el diseño de robots que se muevan con una gracia adaptativa similar.
Cita: Cuevas Rivera, D., Kiebel, S.J. Behavioral evidence for the hierarchical execution of sequential movements. Commun Psychol 4, 52 (2026). https://doi.org/10.1038/s44271-026-00436-5
Palabras clave: control motor, planificación del movimiento, agrupamiento, comportamiento jerárquico, alcance secuencial