Clear Sky Science · es
Agarre por fractura: el impacto dinámico permite un anclaje robótico predecible en hielo de agua dulce
Escalar donde la gravedad casi no existe
Imagínese intentar escalar un acantilado helado donde la gravedad es tan débil que su propio peso no ayuda a que sus botas se claven. Ese es el reto que afrontarán los robots que se envíen a lunas heladas como Encélado de Saturno, donde los científicos esperan buscar señales de vida en respiraderos y cuevas profundas de hielo. Este artículo describe una forma nueva para que los robots se agarre al hielo usando golpes rápidos tipo martillo y un apretón firme, tomando inspiración de los piolets de los montañeros. El resultado es un sistema de anclaje ligero que emplea mucha menos fuerza y energía que los tornillos de hielo o piolets térmicos actuales, lo que podría hacer que mundos helados antes inalcanzables sean accesibles.

Por qué es tan difícil sujetarse al hielo
En la Tierra, un escalador puede apoyar todo su peso en un tornillo de hielo o un piolet para que muerdan la superficie. En Encélado, la gravedad es solo alrededor del uno por ciento de la terrestre, por lo que un robot no puede confiar en su peso para empujar las herramientas dentro del hielo. Las opciones existentes tienen importantes inconvenientes. Los tornillos de hielo necesitan grandes fuerzas de empuje para empezar a penetrar—tanto que, en Encélado, un robot podría necesitar pesar tanto como un gran rover marciano para usarlos de forma efectiva. Los «piolets térmicos» pueden fundirse en su lugar con muy poco empuje, pero consumen cantidades enormes de energía cada vez que se usan, una limitación grave para naves que operan lejos del Sol. Al mismo tiempo, muchos robots escaladores modernos dependen de relieves rugosos en la roca, succión o adhesivos especiales, todos los cuales tienen dificultades con las formas lisas pero onduladas que presenta el hielo glaciar natural.
Tomar prestado un truco de los escaladores humanos
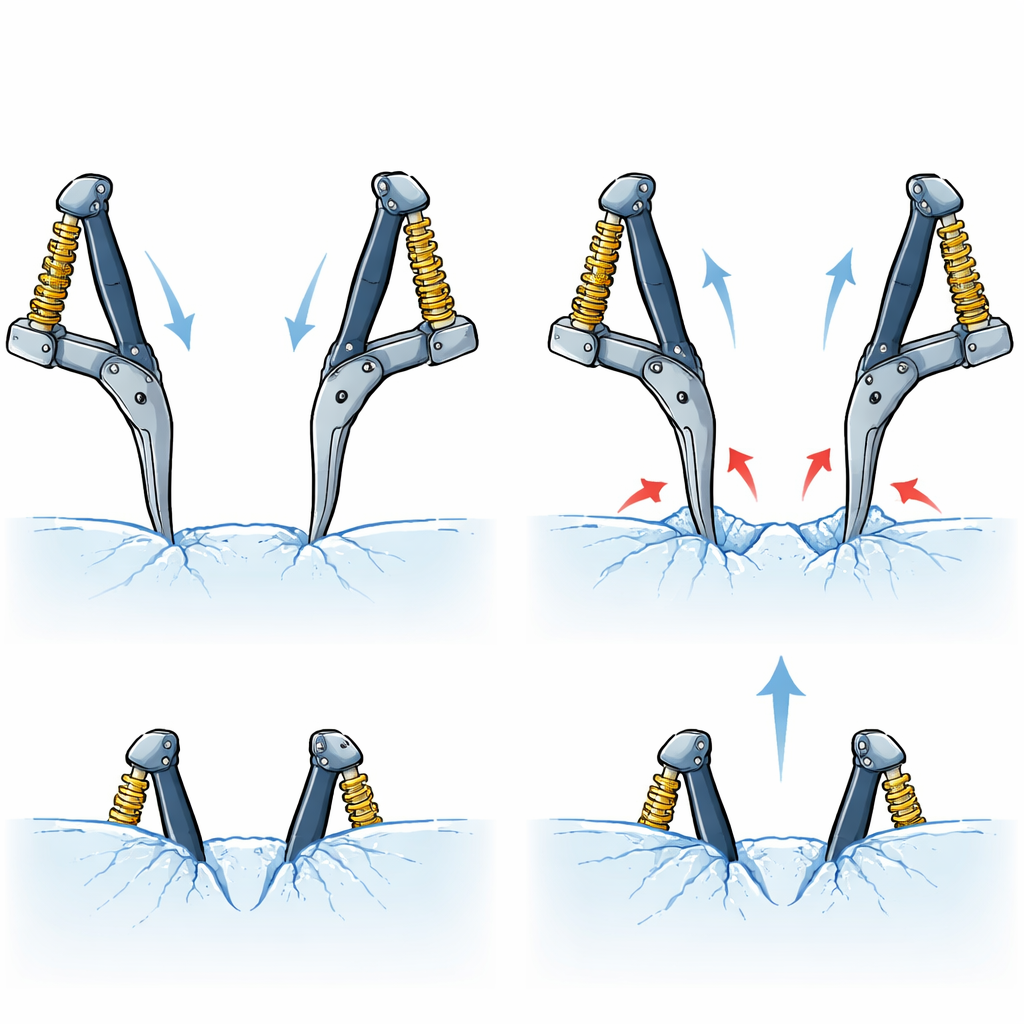
Los autores proponen una estrategia distinta: en lugar de adaptarse a la superficie del hielo, crear sus propios puntos de agarre. Su dispositivo utiliza dos pequeños piolets montados en una pinza compacta. Primero, se enrollan muelles dentro de los brazos, almacenando una cantidad modesta de energía mecánica. Al liberarse, los piolets oscilan como pequeños martillos y golpean el hielo, arrancando pequeñas cavidades. A continuación, el mismo mecanismo aprieta los piolets entre sí para que sus puntas enganche en las nuevas hendiduras. Este proceso en dos pasos—impacto y luego agarre—convierte un parche liso de hielo en algo que el robot puede sujetar, y puede revertirse fácilmente para que el robot dé otro “paso”. Todo el ciclo se alimenta con un solo motor que tanto carga los muelles como ajusta el apriete.
Comprobando la física detrás del agarre
Para asegurarse de que este enfoque funcionaría de forma fiable, el equipo construyó modelos matemáticos de qué tan profundo morderían las puntas de los piolets y cuánto podrían rebotar tras el impacto. Luego probaron piolets individuales oscilando como péndulos contra bloques de hielo de agua dulce enfriados a temperaturas típicas de glaciares. Al comparar teoría y experimento, encontraron que sus modelos podían predecir la profundidad de la cavidad formada y estimar la energía de «retroceso» cuando el piolet rebota. Con esos resultados, calcularon cuánto debe empujar el robot la pinza contra el hielo antes del golpe, de modo que las puntas permanezcan en las nuevas cavidades en lugar de rebotar. Para la energía del muelle elegida, el modelo predijo que alrededor de 16 newtons de empuje—aproximadamente el peso de un par de litros de agua en la Tierra—darían un éxito casi seguro.
Del banco de laboratorio a la pared del glaciar
Con los modelos en mano, los investigadores probaron la pinza completa de dos piolets. En el laboratorio confirmaron que impactos con energía almacenada en los muelles de 8 julios podían crear cavidades lo bastante profundas exigiendo mucho menos empuje inicial que los tornillos de hielo y una energía muy inferior a la de los anclajes térmicos. Después midieron la resistencia del agarre final tirando del dispositivo perpendicularmente al hielo. Al ajustar cuánto se apretaban los piolets entre sí, descubrieron dos formas en que el agarre podía fallar: con poco apriete, las puntas se deslizaban fuera de las cavidades; con apriete muy alto, se desprendían los salientes de hielo. Entre esos extremos existía una zona óptima donde la pinza podía soportar más del doble de su propio peso. Pruebas de campo en un glaciar francés mostraron que el dispositivo podía anclarse en hielo natural empinado, nieve compacta e incluso en troncos, rocas y suelo duro, confirmando que el método de impacto y agarre funciona fuera del laboratorio.
Qué significa esto para los exploradores del futuro
El estudio muestra que fracturar y pinzar el hielo puede ser una vía muy eficiente para que los robots escalen y se mantengan firmes en entornos hostiles de baja gravedad. Al aprovechar que agrietar el hielo usa mucha menos energía que fundirlo, la pinza de doble piolet forma anclajes fuertes y reversibles empleando fuerzas moderadas y solo unos pocos julios de energía por paso. Para misiones a Encélado u otros mundos helados, un sistema así podría permitir que robots pequeños y con energía limitada desciendan con seguridad a respiraderos o se sujeten a paredes de acantilado mientras muestrean materiales que podrían revelar si existe vida más allá de la Tierra. La misma idea también podría ayudar a robots terrestres a explorar glaciares, cuevas heladas y paredes de roca frágil que son demasiado peligrosas o inaccesibles para escaladores humanos.
Cita: Galassi, A., Trebi-Ollennu, A., Papadopoulos, P. et al. Fracture-based grasping: dynamic impact enables predictable robotic anchoring to freshwater ice. npj Robot 4, 22 (2026). https://doi.org/10.1038/s44182-026-00085-0
Palabras clave: escalada robótica en hielo, exploración planetaria, pinzas robóticas, anclaje por fractura del hielo, misiones a Encélado