Clear Sky Science · es
Planificación de trayectorias multirrobot concreta que permite maniobras kino-dinámicamente agresivas
Robots que pueden bailar entre el tráfico
Imagínese decenas de robots voladores y terrestres zumbando por un almacén, sin chocar entre sí y terminando sus tareas más rápido de lo que podrían hacerlo conductores humanos. Este artículo describe una nueva manera de coreografiar ese “tráfico” robótico para que muchas máquinas puedan moverse de forma agresiva y rápida en espacios estrechos manteniendo la seguridad. El trabajo importa porque las mismas ideas podrían, algún día, impulsar flotas de robots en fábricas, almacenes y servicios de reparto que deben operar sin pausa en nuestro mundo cotidiano.
Por qué agrupar muchos robots es tan difícil
Coordinar una multitud de robots es mucho más difícil que controlar uno solo. Cada robot debe ir desde su punto de partida hasta su objetivo sin chocar, sin bloquear a otros ni quedarse atrapado en bucles infinitos. Los enfoques actuales tienden a situarse en dos extremos. Algunos métodos tratan a los robots como piezas de juego en una cuadrícula, lo que hace que planificar para cientos de ellos sea rápido y matemáticamente ordenado —pero las trayectorias resultantes suelen ignorar cómo se mueven, aceleran o giran las máquinas reales. Otros métodos simulan el movimiento físico completo y generan trayectorias suaves y elegantes, pero se vuelven dolorosamente lentos o poco fiables cuando el número de robots supera unas pocas unidades.
Un camino intermedio: planificación “concreta”
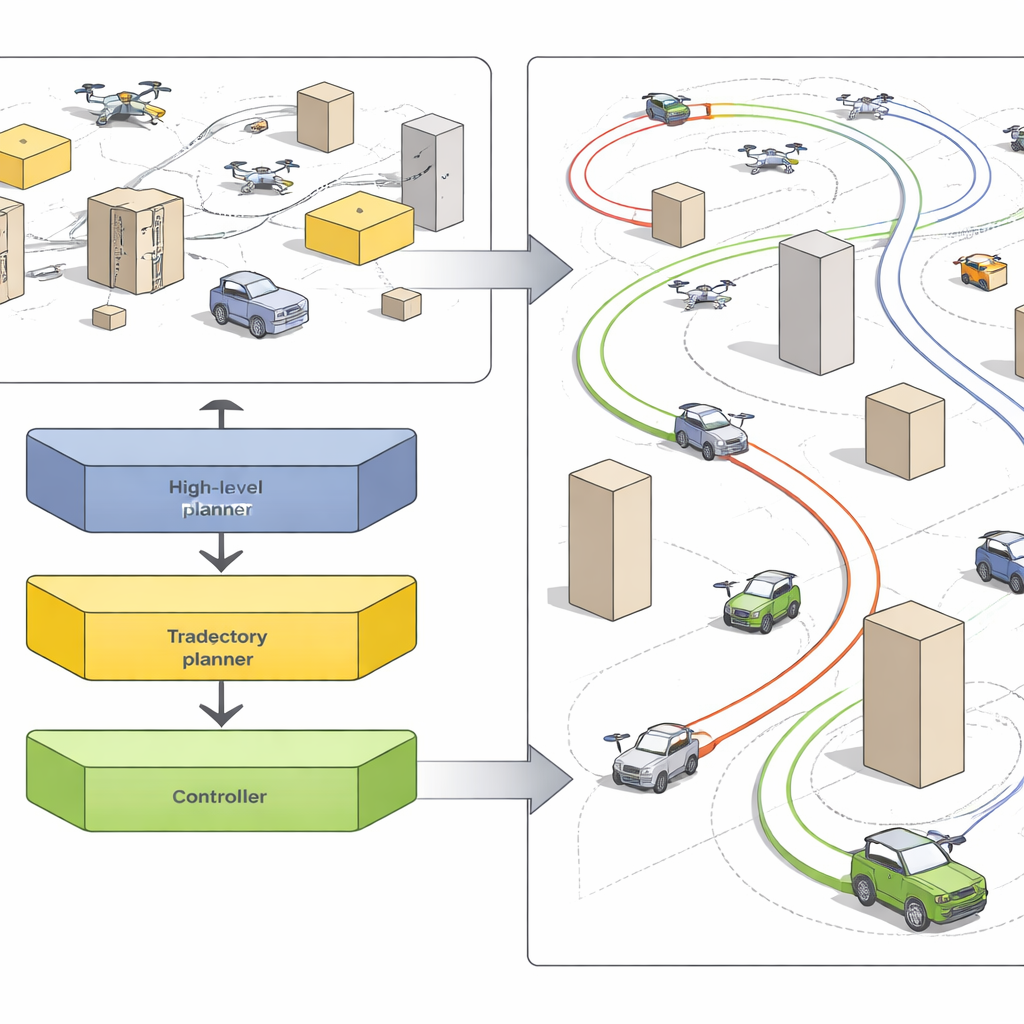
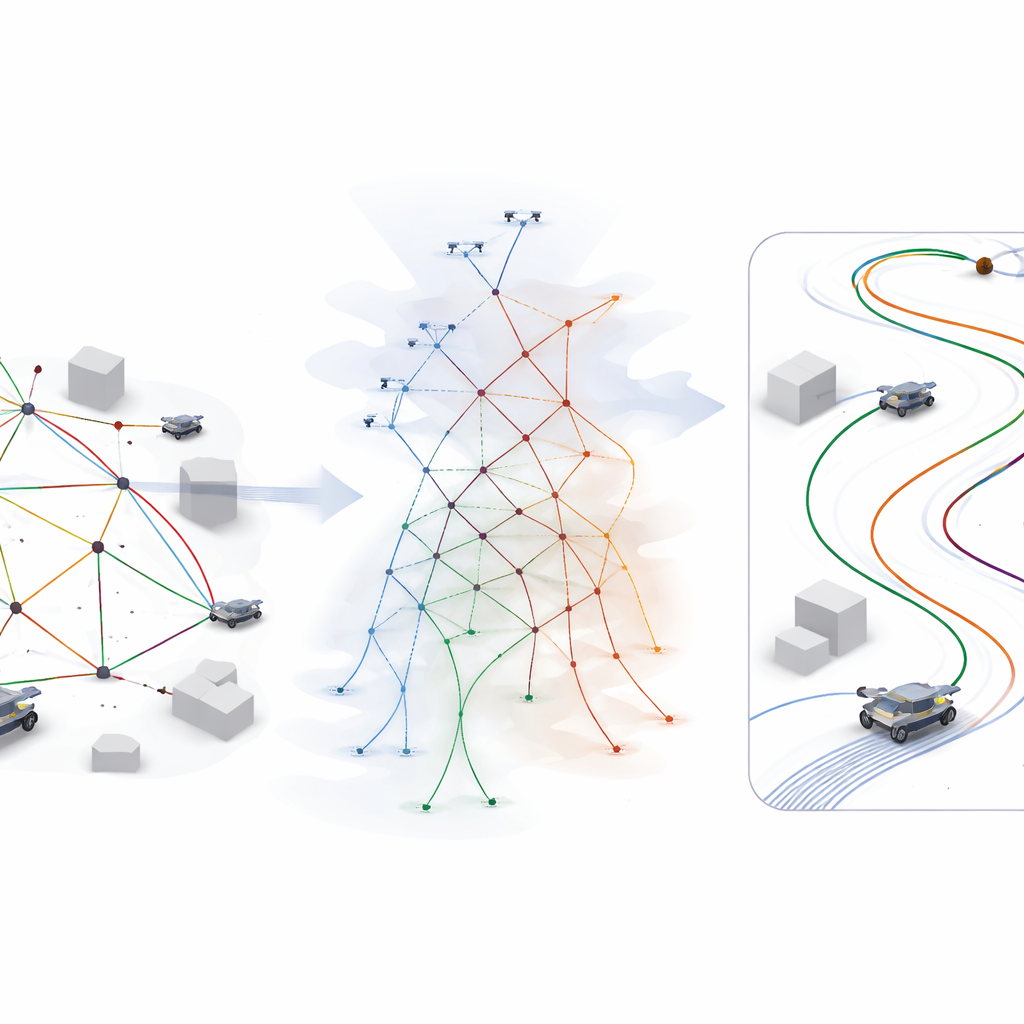
Los autores proponen una estrategia híbrida que llaman planificación concreta multirrobot. La idea es combinar la estructura nítida de la planificación estilo cuadrícula con una imagen realista de cómo se mueven realmente los robots. En lugar de trabajar puramente en una cuadrícula abstracta o en una física totalmente continua, el sistema utiliza una descripción por capas del movimiento. Un planificador central busca sobre un conjunto discreto de movimientos posibles para todos los robots a la vez, pero cada movimiento se enriquece con predicciones sobre cuánto tiempo llevará, cómo podría desviarse el robot de su línea prevista y qué tan cerca puede pasar con seguridad de otros. Estas predicciones provienen de modelos basados en datos entrenados con experimentos reales de robots, de modo que el planificador “sabe” cómo tiende a comportarse su flota en la práctica.
De bocetos aproximados a movimientos precisos
Una vez que el planificador conjunto ha generado secuencias de puntos de paso seguras y sin conflictos para cada robot, el marco se aproxima al detalle. Un segundo módulo transforma cada ruta gruesa en una trayectoria densa y suave que respeta los límites de empuje, dirección y otros factores físicos. Para hacer esto con rapidez, los autores generaron primero, fuera de línea, muchos ejemplos mediante optimización numérica intensa de movimientos casi óptimos en tiempo; luego entrenaron redes neuronales basadas en transformadores para imitar esos ejemplos. En tiempo de ejecución, estas redes pueden generar trayectorias de referencia de alta calidad en menos de un milisegundo. Una tercera capa, un controlador predictivo (MPC) equipado con un filtro de seguridad, ajusta constantemente los controles para seguir esas referencias y utiliza sensores locales para esquivar sorpresas, como un obstáculo errante o un ligero error de seguimiento.
Poniendo a prueba cuarenta robots
El equipo demostró su sistema con una flota mixta de 20 cuadricópteros, 8 robots terrestres y 12 robots actuando como obstáculos móviles, todos operando juntos en una arena interior del tamaño de una sala. En un conjunto de experimentos, enjambres de drones compitieron a través de espacios confinados a velocidades pico superiores a cinco metros por segundo mientras se evitaban entre sí en una especie de ballet tridimensional. En otro, robots terrestres cruzaron repetidamente una zona llena de obstáculos en movimiento aleatorio, completando más misiones, con menos paradas y sin colisiones, que los métodos competidores. Las pruebas más exigentes involucraron a los 40 robots ejecutando múltiples misiones en secuencia, con el sistema replanteando trayectorias continuamente bajo demanda sin bloqueos ni choques.
Vislumbres de futuros sistemas de reparto y almacén
Para mostrar cómo esto podría trasladarse a tareas del mundo real, los autores montaron entregas simuladas de “última milla” y operaciones de almacén. En el escenario de reparto, robots terrestres transportaban drones hasta una “orilla del río”, donde los drones despegaban, volaban a puntos de entrega dispersos, regresaban a sus bases móviles y luego volvían al área de partida —todo mientras evitaban obstáculos en movimiento. En la maqueta de almacén, equipos de drones trasladaban repetidamente paquetes virtuales entre estanterías y zonas de entrega, manteniendo un movimiento denso y ágil y un alto rendimiento. Estos estudios de caso requirieron solo ajustes menores del marco, lo que subraya su capacidad de adaptarse a nuevas plataformas y misiones.
Qué significa esto de cara al futuro
En términos sencillos, este trabajo demuestra que es posible que grandes equipos de robots se muevan con audacia y seguridad en espacios estrechos y cambiantes combinando cuidadosamente una planificación de alto nivel rápida, modelos de movimiento realistas y comprobaciones de seguridad como último recurso. El enfoque “concreto” convierte planes abstractos en movimientos que las máquinas reales pueden ejecutar a velocidad, a la vez que ofrece garantías frente a colisiones y bloqueos en muchos entornos prácticos. Aunque los entornos extremadamente caóticos y los espacios completamente desconocidos siguen siendo un desafío, el marco apunta hacia un futuro en el que flotas de drones de reparto, robots de almacén y otros trabajadores robóticos puedan compartir entornos concurridos sin supervisión humana constante.
Cita: Okumura, K., Yang, G., Gao, Z. et al. Concrete multi-agent path planning enabling kinodynamically aggressive maneuvers. npj Robot 4, 20 (2026). https://doi.org/10.1038/s44182-026-00083-2
Palabras clave: coordinación multi-robot, planificación de trayectorias, enjambres de robots, automatización de almacenes, entrega con drones