Clear Sky Science · es
Estrategia adaptativa inspirada en insectos para compensar deficiencias sensoriales olfativas en la localización de fuentes de olor por robots
Por qué perder un sensor no significa perder el rastro
Imagínese un robot de búsqueda y rescate tratando de detectar una fuga de gas o a un superviviente atrapado en un edificio derrumbado: entonces uno de sus sensores clave se rompe. Los robots actuales suelen fallar de forma pronunciada ante ese tipo de daño. Este estudio se inspira en un sorprendente experto en navegación olfativa, el macho de la polilla del gusano de seda, para mostrar cómo los animales pueden seguir localizando una fuente de olor incluso después de perder la mitad de su “nariz”, y cómo esa estrategia puede copiarse en robots cuadrúpedos.
Un pequeño navegador con un poderoso sentido del olfato
Muchos animales —desde insectos hasta perros— utilizan señales químicas en el aire para encontrar alimento, parejas o refugio seguro. Los olores son especialmente útiles cuando la visión está obstaculizada por la oscuridad, el humo o los escombros. Pero las plumas de olor reales son desordenadas: el viento cambia, edificios y árboles desvían el flujo, y el olor más intenso no está siempre directamente a barlovento de la fuente. La mayoría de los robots buscadores de olor asumen que todos sus sensores olfativos funcionan perfectamente y que las direcciones del olor y del viento se alinean con precisión. En la naturaleza, ninguna de esas suposiciones se mantiene. La polilla del gusano de seda Bombyx mori ofrece un contraejemplo natural: los machos pueden localizar a las hembras que liberan feromonas sexuales incluso en aire turbulento y, de forma intrigante, incluso cuando se les ha quitado una de sus dos antenas —sus principales órganos olfativos.
Cómo afrontan las polillas la pérdida de una antena
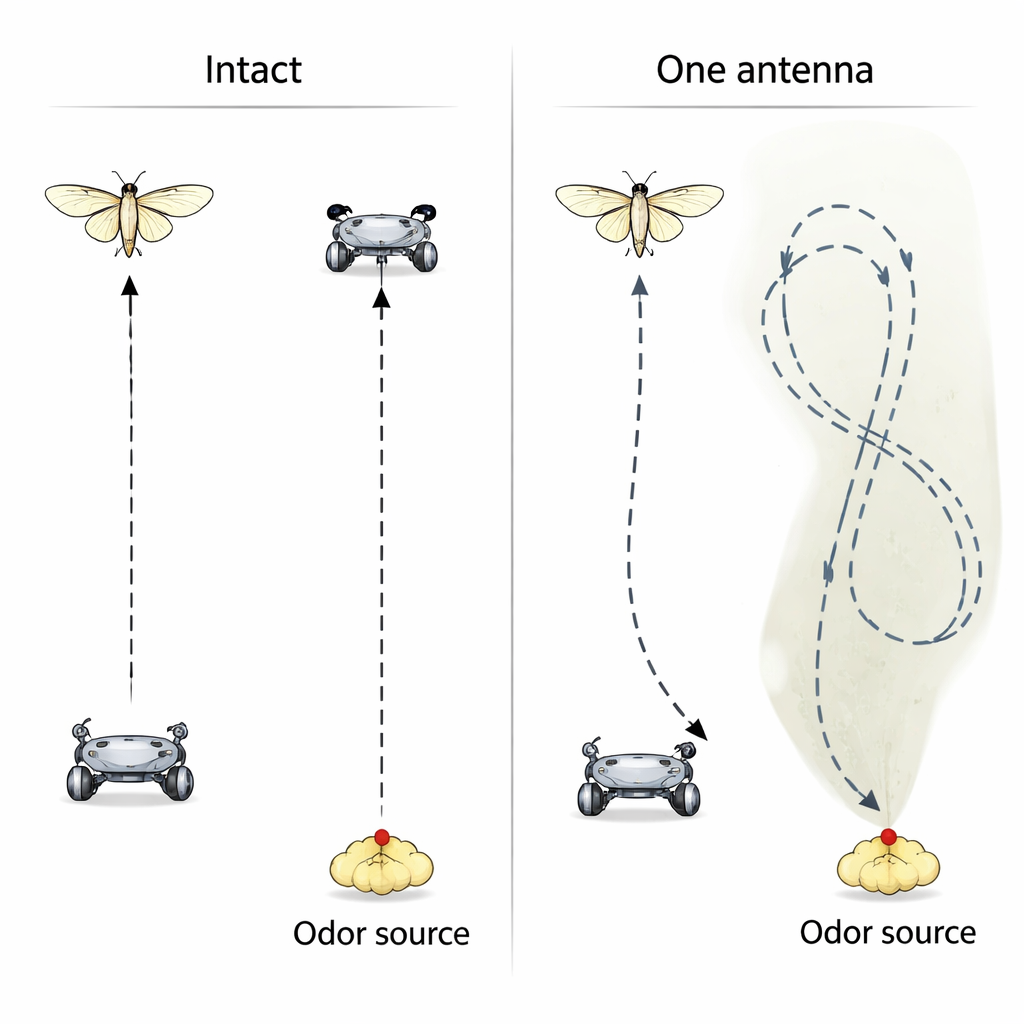
Los investigadores primero evaluaron qué tan bien podían caminar hacia una fuente de olor machos intactos de la polilla del gusano de seda y machos a los que se les había extirpado la antena izquierda, en laboratorio. Ambos grupos comenzaron a 15 centímetros de un punto emisor de feromonas. Sorprendentemente, la tasa de éxito —alcanzar la fuente en menos de un minuto— no disminuyó de forma significativa tras la pérdida de una antena. Lo que sí cambió fue la trayectoria: las polillas intactas tendían a avanzar por una ruta relativamente recta, mientras que las de una sola antena tomaban caminos más largos y sinuosos que se curvaban hacia el lado de la antena restante. Medidas detalladas de los movimientos de la cabeza revelaron que las polillas cambiaban su estrategia de giro según en qué parte de la antena restante se detectara el olor —cerca de la base o cerca de la punta— y según hacia qué lado estuvieran girando en ese momento.
Dos reglas simples ocultas en un comportamiento complejo
Al pulsar repetidamente olor desde la izquierda y la derecha y registrar los ángulos de la cabeza, el equipo convirtió el comportamiento en curvas de probabilidad que muestran cuán probable era que una polilla girara a la izquierda o a la derecha después de cada bocanada. Cuando un olor alcanzaba cerca de la base de la antena, la polilla tendía fuertemente a continuar rotando hacia ese mismo lado, comprometiéndose efectivamente a seguir el giro en curso. Cuando el olor golpeaba cerca de la punta, la elección se volvía más equilibrada, con un ligero sesgo a explorar el lado opuesto. En términos sencillos, la pérdida de la antena no hacía que la polilla se rindiera; la hacía adoptar un patrón de búsqueda que muestrea ambos lados del espacio de manera más amplia, especialmente a lo largo del “borde” de la pluma de olor donde la intensidad del olor cambia con rapidez.
Enseñar a un robot cuadrúpedo a oler como una polilla
Después, los investigadores construyeron un robot cuadrúpedo con dispositivos detectores de olor en su “cabeza”, dispuestos para imitar la estructura base-a-punta de una antena. Crearon dos algoritmos de búsqueda. El primero, un enfoque estándar inspirado en polillas llamado SZL (por surge–zigzag–loop), asume dos sensores olfativos operativos y elige su dirección recta de “avance” a partir del tiempo relativo de las detecciones izquierda y derecha. El segundo, llamado context-dependent moth-inspired (CDMI), incorpora las nuevas reglas observadas en las polillas: estima en qué parte del sensor restante se detectó el olor y usa las curvas de probabilidad derivadas de los experimentos animales para decidir hacia dónde moverse y con qué intensidad girar. En pruebas en interiores, SZL funcionó mejor cuando ambos sensores estaban intactos, ofreciendo trayectorias rápidas y relativamente rectas. Pero cuando se desactivó un sensor, CDMI superó claramente a SZL, encontrando la fuente con más frecuencia al seguir el borde cambiante del campo de olor en trayectorias en bucle similares a las de las polillas con una sola antena.
Robots que siguen siendo eficaces cuando algo falla
Para llevar la idea más lejos, el equipo probó sus robots al aire libre, donde el viento natural y la turbulencia hacen que las plumas de olor sean muy irregulares. Asignaron el algoritmo convencional SZL al robot intacto y el algoritmo CDMI al robot con “un solo sensor”. Ambos alcanzaron tasas de éxito comparables, pero el robot dañado que usaba la estrategia adaptativa inspirada en la polilla a menudo encontró la fuente con rutas más cortas y menos sinuosas. Esto sugiere que, en condiciones duras y del mundo real, puede ser mejor cambiar de un esquema de sensado preciso pero frágil a una estrategia más exploratoria que siga los bordes. El mensaje más amplio es que la navegación robusta no requiere una inteligencia artificial cada vez más compleja. En su lugar, reglas simples y fundamentadas biológicamente —ligadas a cómo se disponen los sensores en el cuerpo y a cómo el cuerpo interactúa con su entorno— pueden ayudar a crear robots que sigan funcionando incluso cuando fallan piezas clave, una cualidad crucial para misiones de exploración y rescate de larga duración.
Cita: Shigaki, S., Yokota, K., Sekiwa, R. et al. Insect-inspired adaptive behavioral compensation strategy against olfactory sensory deficiency for robotic odor source localization. npj Robot 4, 12 (2026). https://doi.org/10.1038/s44182-026-00080-5
Palabras clave: navegación olfativa, robótica bioinspirada, localización de fuentes de olor, IA inspirada en insectos, inteligencia incorporada