Clear Sky Science · es
Pinza reactiva al tacto con una palma activa para manipulación hábil
Robots que pueden sentir lo que sujetan
Imagínese un robot que pueda recoger con suavidad una fresa madura, desenroscar un envase con tapa de seguridad para niños o atornillar una bombilla en el techo, todo ello sin aplastar, dejar caer ni desalinear nada. Este artículo describe una nueva pinza robótica que acerca a las máquinas a ese tipo de habilidad manual cuidadosa y humana, dotando al robot no solo de dedos inteligentes, sino de una palma activa y altamente sensible.
Una palma que hace más que sostener
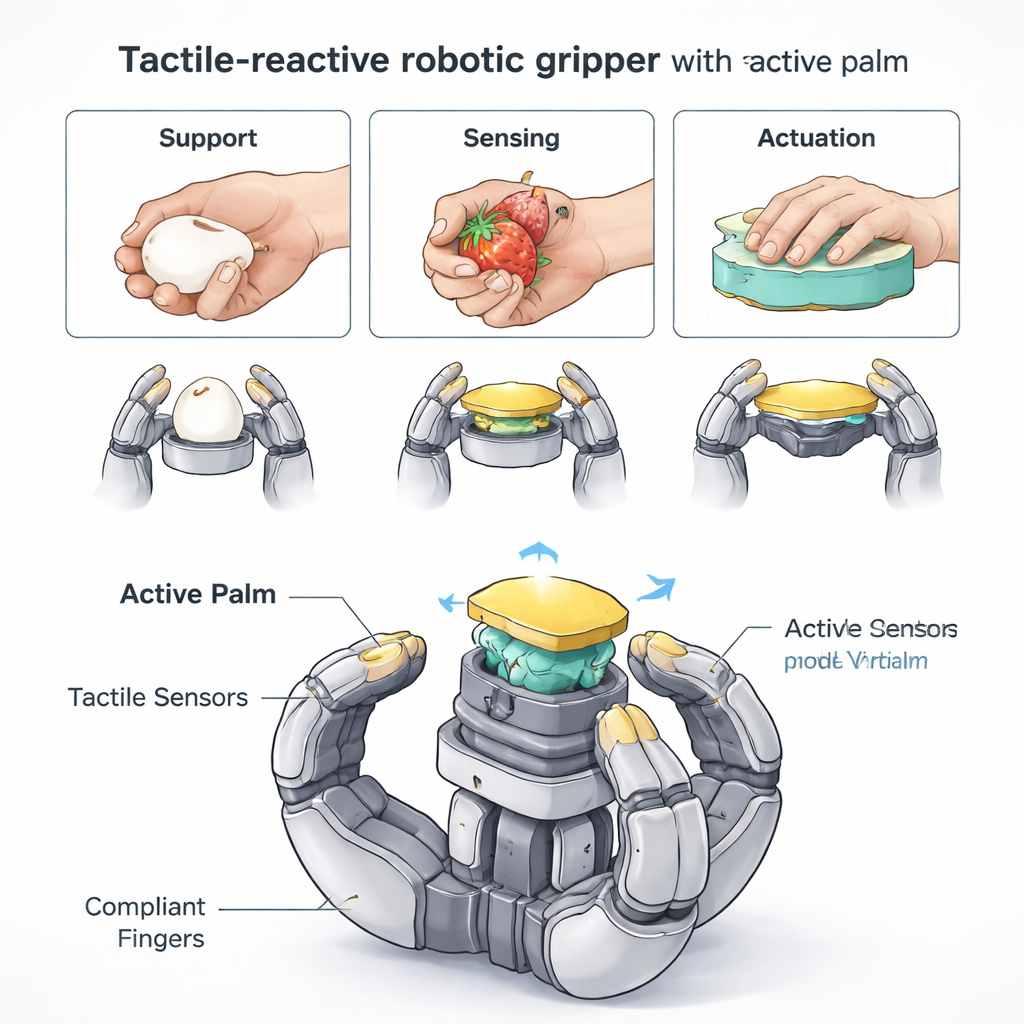
La mayoría de las manos robóticas actuales tienen o bien garras rígidas y simples que solo pueden agarrar, o manos multifalángicas muy complejas que son difíciles de construir y controlar. Una idea clave de este trabajo es que las manos humanas dependen en gran medida de la palma, no solo de los dedos, para soporte, sensación y empuje. Los investigadores diseñaron una pinza robótica de tres dedos con una palma central que puede moverse verticalmente y que está cubierta por un sensor táctil basado en cámara. Cada punta de dedo también dispone de una almohadilla flexible que mide la presión. En conjunto, estas partes permiten a la pinza sentir dónde y cómo contacta un objeto y ajustar su agarre en tiempo real, a pesar de que todo el sistema emplea solo siete articulaciones móviles.
Movimientos simples, muchas maneras de agarrar
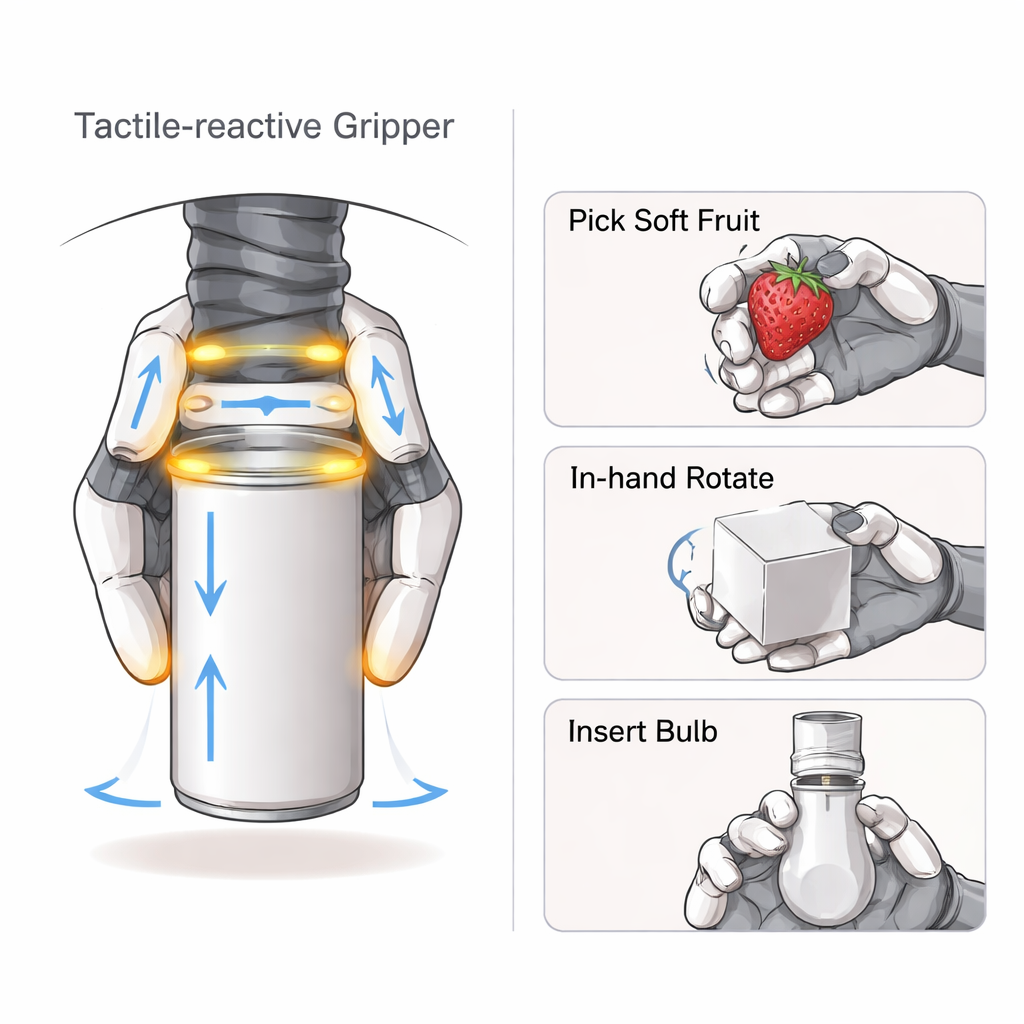
Los tres dedos idénticos de la pinza pueden barrer y doblarse, lo que permite varios estilos de agarre cotidianos: encerrar objetos grandes como pelotas, pellizcar objetos delgados como tarjetas y sujetar herramientas pesadas con un agarre de fuerza. La estructura blanda y parecida a una columna de los dedos se envuelve naturalmente alrededor de objetos de distintas formas sin programación detallada. Mientras tanto, la palma se desliza verticalmente como un ascensor, de modo que puede presionar contra un objeto, compartir la carga con los dedos o desplazar la posición del objeto dentro de la mano. Simulaciones y experimentos muestran que incluso con solo dos articulaciones por dedo más la palma móvil, la mano puede mover objetos en muchas direcciones y evitar posturas incómodas y difíciles de controlar.
Sentir con dedos y palma
Para entender lo que sujeta, la pinza combina tres tipos de sensado: imágenes táctiles detalladas desde la palma, mapas de presión de las yemas y lecturas de los propios ángulos articulares. Un sistema de aprendizaje automático fusiona estas señales, prestando más atención a las pistas que resulten más útiles para cada objeto. En pruebas con latas de bebida y pelotas de distintos tamaños y materiales, el sistema pudo reconocer lo que sujetaba con casi un 99% de precisión. Esta rica sensación táctil también guía cuánta fuerza aplicar, cuándo dejar de cerrar los dedos y cómo mover la palma para mantener el contacto estable sin generar demasiada fricción.
De objetos de prueba a fruta y bombillas
El equipo sometió la pinza a un punto de referencia ampliamente usado para agarre robótico con objetos cotidianos como pelotas, herramientas y pequeñas piezas de ferretería. Obtuvo puntuaciones superiores a las de varias pinzas de investigación conocidas mientras empleaba menos piezas móviles. Más allá de los conjuntos de prueba, la pinza demostró que podía recoger frutas frágiles —fresas, uvas, tomates y más— sin magulladuras visibles incluso días después, verificado bajo luz ultravioleta. También pudo trasladar y rotar bloques y cilindros con precisión dentro de la mano, atornillar una bombilla en un portalámparas orientado hacia arriba, empujar el émbolo de una jeringa mientras sujetaba el cilindro y abrir tapas resistentes a niños presionando y girando. En muchas de estas tareas, la palma móvil proporcionó el empuje, el apoyo o la percepción adicional que las pinzas que solo tienen dedos no ofrecen.
Por qué esto importa para los robots del futuro
El trabajo demuestra que los robots no siempre necesitan más y más dedos o articulaciones para ser habilidosos. Al coordinar cuidadosamente unos pocos dedos flexibles con una palma activamente controlada y sensible al tacto, esta pinza alcanza una mezcla de fuerza, delicadeza y percepción que empieza a parecerse a la mano humana. Dado que las piezas son en su mayoría impresas en 3D y utilizan sensores comerciales, el diseño es relativamente fácil de reproducir. Con un control adicional basado en aprendizaje, pinzas similares podrían ayudar a los robots a manejar la compra de comestibles, asistir en cuidados domésticos o trabajar de forma segura con personas en fábricas, sintiendo con confianza lo que hacen en lugar de limitarse a adivinar.
Cita: Zhou, Y., Lee, W.S., Gu, Y. et al. Tactile-reactive gripper with an active palm for dexterous manipulation. npj Robot 4, 13 (2026). https://doi.org/10.1038/s44182-026-00079-y
Palabras clave: pinza robótica, sensado táctil, manipulación hábil, mano robótica, palma activa