Clear Sky Science · es
Aprovechar la propiocepción en alas blandas acuáticas permite una rechazada híbrida pasiva-activa de perturbaciones
Alas inteligentes bajo el agua
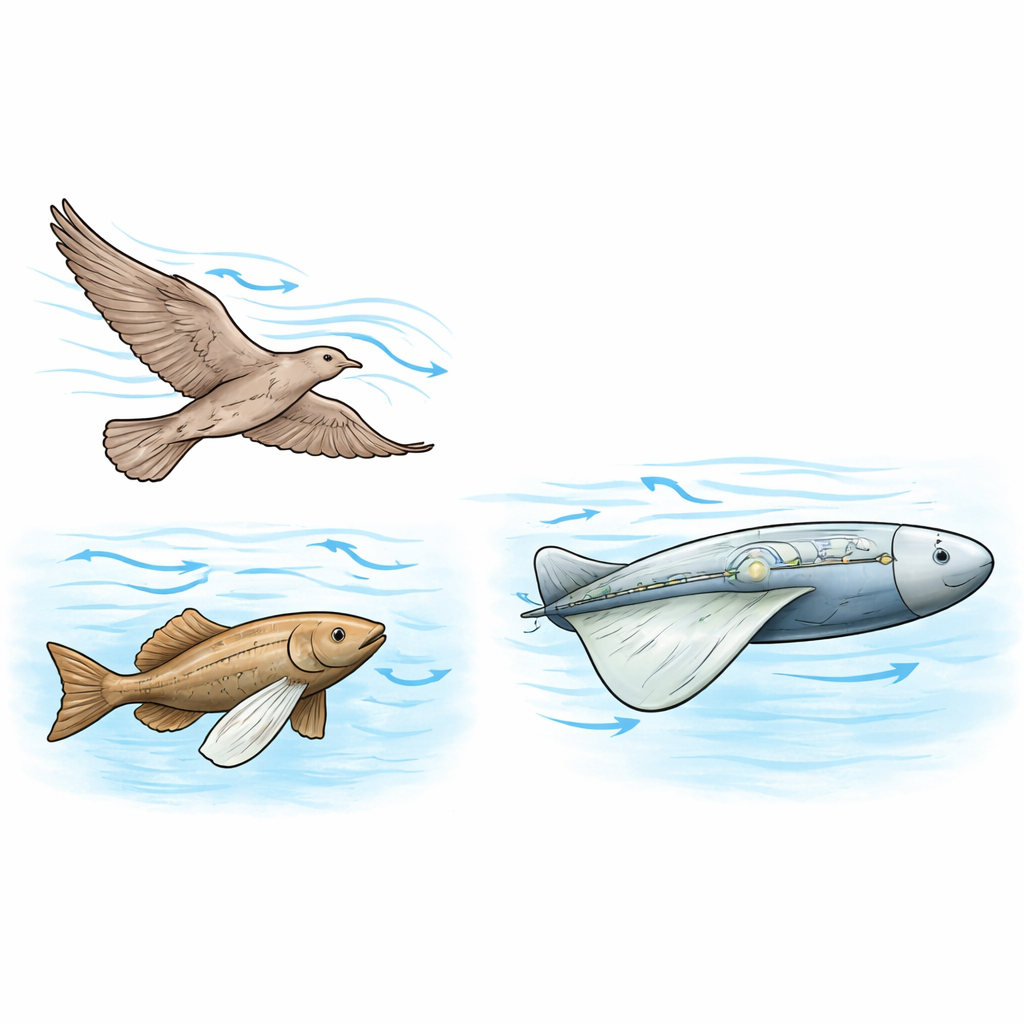
Cualquiera que haya observado a un pájaro permanecer en el aire con viento racheado o a un pez mantenerse estable en una corriente rápida ha visto a la naturaleza resolver un problema de ingeniería difícil: cómo mantener la trayectoria cuando el fluido circundante se niega a comportarse. Este estudio muestra cómo un nuevo tipo de ala blanda submarina, equipada con un “sentido del propio cuerpo” similar a la propiocepción animal, puede detectar automáticamente cambios repentinos en el flujo y reconfigurarse para mantenerse estable. El trabajo apunta hacia futuros robots submarinos que planeen más como los animales y menos como máquinas rígidas, ahorrando energía mientras manejan mares agitados.
Aprendiendo de aves y peces
En la naturaleza, las alas y las aletas no son palas rígidas; se doblan, se retuercen y se flexionan. Las aves detectan el movimiento del aire mediante diminutos receptores en sus plumas, mientras que los peces utilizan células sensibles a la presión a lo largo de sus cuerpos y en las radios de sus aletas. Estos sensores integrados permiten a los animales percibir cómo se deforman sus apéndices en agua o aire en movimiento y responder casi al instante, rechazando rachas y turbulencias. En contraste, la mayoría de los vehículos submarinos usan superficies de control rígidas y aparatos separados para medir el flujo, lo que los hace lentos y consumidores de energía cuando el entorno se vuelve caótico. Los autores sostienen que combinar flexibilidad y sensado en una única estructura blanda podría reducir esa brecha.
Un ala blanda con sentidos integrados
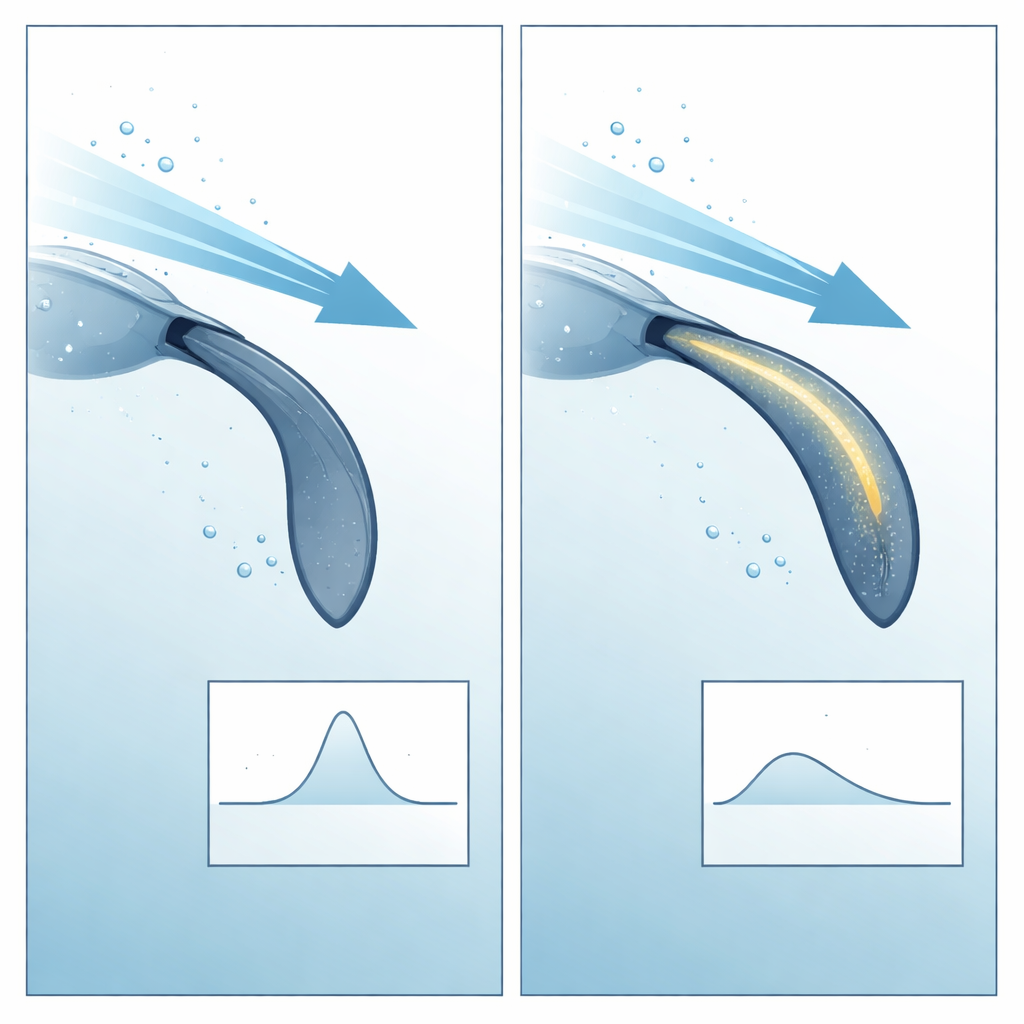
El equipo construyó una media ala para uso submarino que une una cola blanda y flexible con una nariz rígida. En el interior de la sección blanda discurren tubos inflables llenos de líquido, que pueden presurizarse para cambiar la curvatura, o doblado, del ala. En el exterior, pegaron una delgada “piel” electrónica hecha de silicona y cables de metal líquido. Al doblarse el ala, cambia la separación entre estos conductores enterrados, modificando su capacitancia eléctrica. Al entrenar un modelo de aprendizaje automático sencillo para relacionar estas señales con las formas rastreadas por cámara, los investigadores convirtieron la e-piel en un sensor de forma de alta precisión. Una vez entrenado, el sistema puede estimar el doblado del ala en tiempo real sin cámaras externas, incluso mientras está sumergido.
Convertir la forma en control
Con esta ala blanda propioceptiva montada en un túnel de agua, los investigadores simularon rachas como cambios repentinos en el ángulo del ala respecto al flujo. Primero demostraron, en condiciones estacionarias, que ajustando el doblado podían producir la misma sustentación a diferentes ángulos de flujo, o sustentaciones distintas al mismo ángulo. Esto significa que cuando una racha intenta desequilibrar el ala, existe un “camino” en el espacio de formas que puede restaurar la sustentación deseada. A continuación programaron una respuesta idealizada en lazo abierto —sabiendo exactamente cuándo ocurriría la racha— para inflar o desinflar los tubos internos en los momentos adecuados. En este escenario óptimo, cambiar el doblado redujo la caída de sustentación durante una perturbación de alrededor del 50% a aproximadamente un 10%.
Dejar que el ala reaccione por sí misma
La prueba más exigente fue dejar que el ala decidiera por sí misma cuándo algo iba mal. Aquí la e-piel detecta una “firma” característica en la señal de doblado: un rápido sobreimpulso y oscilación al flexionarse el cuerpo blando bajo un cambio súbito del flujo. Cuando aparece este patrón, un controlador simple infla los tubos en la dirección más probable para devolver la sustentación hacia su objetivo, sin calcular explícitamente el flujo o las fuerzas. Incluso esta estrategia minimalista funciona bien. En comparación con un ala rígida equivalente, el ala blanda no actuada por sí sola reduce el impulso de una racha —esencialmente, el empujón total entregado a lo largo del tiempo— en aproximadamente un factor de tres. Cuando se añade control activo, el impulso total de sustentación no deseado se reduce hasta en un 87%, acercándose e incluso superando la capacidad de manejo de rachas reportada para algunas aves, aunque en un medio diferente.
Por qué esto importa para los robots del futuro
Para un lector no especializado, la conclusión clave es que hacer los robots submarinos más blandos y más conscientes de sí mismos puede volverlos a la vez más resistentes y más eficientes. En lugar de combatir las perturbaciones con motores de fuerza bruta y sensores externos complejos, el propio cuerpo flexible del robot y su piel integrada ayudan a absorber y leer el flujo, desencadenando cambios modestos de forma que lo mantienen en curso. Aunque este estudio se centra en un ala experimental única en un tanque controlado, los mismos principios podrían aplicarse a vehículos completos o a robots nadadores tipo pez. A largo plazo, esa “inteligencia incorporada” podría permitir que las máquinas exploren océanos turbulentos con la misma gracia silenciosa con que las aves y los peces ya se desplazan en aire y agua.
Cita: Micklem, L., Dong, H., Giorgio-Serchi, F. et al. Harnessing proprioception in aquatic soft wings enables hybrid passive-active disturbance rejection. npj Robot 4, 16 (2026). https://doi.org/10.1038/s44182-026-00078-z
Palabras clave: robótica blanda, vehículos submarinos, diseño bioinspirado, rechazo de perturbaciones en el flujo, sensado propioceptivo