Clear Sky Science · es
Percepción táctil incorporada de las propiedades de objetos blandos
Por qué importa enseñar a los robots a sentir
Imagínese un robot examinando con delicadeza el abdomen de un paciente, clasificando fruta madura sin magullarla o montando piezas frágiles solo por el tacto. Para hacer cualquiera de estas tareas con seguridad, los robots deben aprender a “sentir” objetos blandos de una manera rica y semejante a la humana. Este artículo describe cómo los investigadores construyeron una piel electrónica y un nuevo tipo de modelo de aprendizaje para que los robots perciban mejor la suavidad, la forma y la textura superficial de objetos esponjosos, acercando a las máquinas a un tacto verdaderamente diestro.
Construyendo un sentido del tacto de alta tecnología
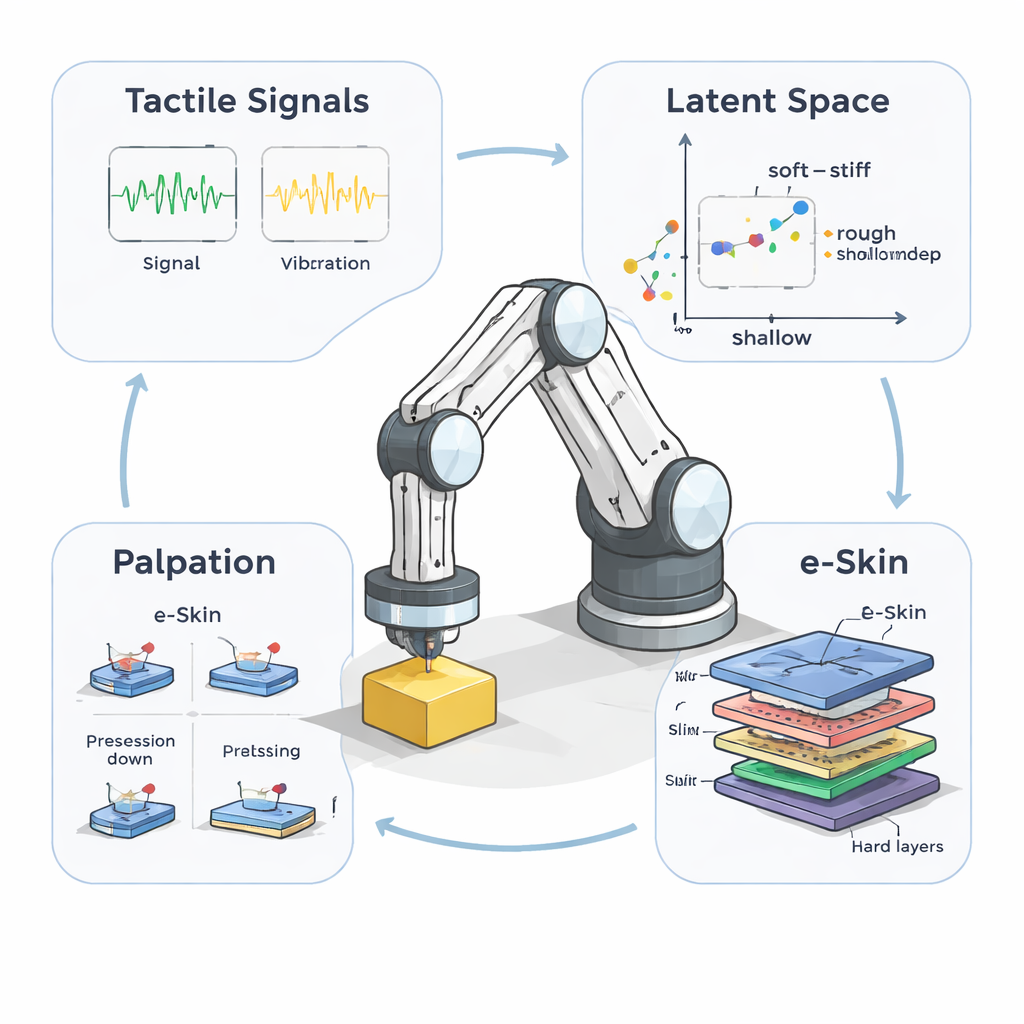
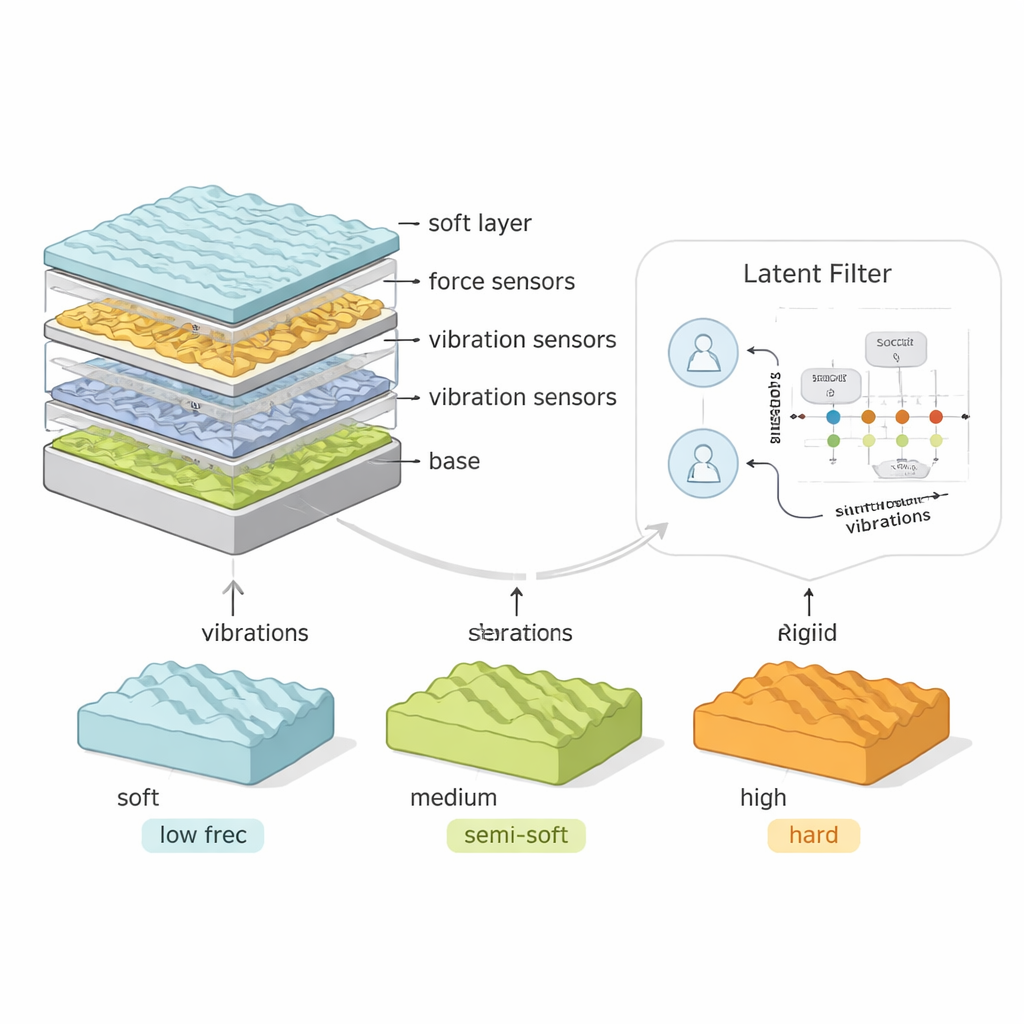
La piel humana es blanda, estratificada y está llena de distintos receptores que reaccionan a la presión, la tensión y la vibración. El equipo se propuso imitar estas capacidades en un robot. Crearon una piel electrónica modular, o e‑Skin, hecha de capas apiladas de silicona con sensores integrados. Dos capas contienen rejillas densas de sensores de fuerza que miden cuánto se hunde la piel en distintos puntos, mientras que una tercera capa aloja pequeños acelerómetros que captan vibraciones rápidas, como el zumbido que se siente al deslizar un dedo sobre una tela rugosa. Al cambiar los tipos de silicona, podían hacer la e‑Skin más blanda o más rígida, y al activar o desactivar capas de sensores, podían probar distintas combinaciones de “órganos sensoriales”.
Diseñando un mundo de cosas blandas
Para estudiar el tacto de forma controlada, los investigadores necesitaban más que simples bloques de goma. Crearon una biblioteca de “objetos onda” con propiedades cuidadosamente ajustadas. Cada objeto tenía una superficie superior ondulada cuyas protuberancias podían ser bajas o altas (amplitud) y estar próximas o separadas (frecuencia espacial), y cada uno se moldeó con materiales que iban desde silicona muy blanda hasta plástico rígido. Algunas muestras también ocultaban una fina capa rígida bajo una superficie blanda, imitando tejidos o materiales que cambian al presionar más profundo. Esto permitió al equipo conocer la suavidad y la textura exactas de cada objeto que tocaba el robot, para poder comparar lo que el robot “sentía” con la verdad de referencia.
Enseñando a los robots a explorar con el tacto
Al igual que las personas pinchan, presionan y deslizan los dedos de distintas maneras para juzgar un objeto, el robot usó tres movimientos básicos de palpación. En la presión, se movía recto arriba y abajo para sondear la suavidad global. En la precesión, inclinaba y rodaba la e‑Skin, contactando varias regiones cercanas y sondando formas más complejas. En el deslizamiento, se movía de lado a lado sobre la superficie para resaltar texturas finas y la fricción. Para cada objeto, el robot realizó estos movimientos con distintas profundidades y velocidades, generando miles de señales táctiles variables en el tiempo: fuerzas que cambiaban a lo largo de la piel y vibraciones que ondulaban a través de ella. Estas corrientes dinámicas y ricas de datos proporcionan mucha más información que una única punzada estática.
Descubriendo patrones ocultos en el tacto
Para dar sentido a este aluvión de información, los autores introdujeron un modelo de aprendizaje automático que llaman Filtro Latente. En lugar de intentar etiquetar objetos directamente, el modelo aprende un “mapa” interno donde cada punto resume la interacción continua del robot con un objeto. Este espacio latente está estructurado de modo que algunos componentes responden rápidamente a señales táctiles inmediatas, mientras que otros integran información lentamente a lo largo del tiempo. Al entrenar el Filtro Latente con muchas interacciones, el equipo demostró que este mapa interno se alinea de forma natural con rasgos físicos significativos como la rugosidad de la superficie, la altura de las protuberancias y la rigidez, aunque al modelo nunca se le dijeron explícitamente esas etiquetas. Un paso de regresión separado confirmó que estas características ocultas podían predecir las propiedades mecánicas reales de un objeto con buena precisión.
Cómo funcionan juntos piel, sentidos y movimiento
Los experimentos revelaron que ninguna capa de sensores o estrategia de movimiento es la mejor para todas las situaciones. Combinar información de vibración y fuerza mediante un enfoque de “fusión tardía”, donde cada tipo de señal se procesa por separado antes de fusionarse, produjo la comprensión más fiable de los objetos blandos. Dos capas de fuerza ayudaron al sistema a detectar cizallamiento y tensión, que son vitales para percibir la rigidez y estructuras internas ocultas, mientras que las vibraciones fueron especialmente útiles para sentir texturas finas durante el deslizamiento. La suavidad mecánica de la propia e‑Skin también importó: las pieles más rígidas fueron mejores para medir la rigidez general y la forma, mientras que las más blandas destacaron en detectar variaciones sutiles en materiales deformables o en capas. Los resultados sugieren que el tacto robótico debería diseñarse de manera conjunta: las propiedades de la piel, la electrónica de detección y la forma de mover el robot deben ajustarse en conjunto.
Qué significa esto para los robots cotidianos
Al unir una e‑Skin estratificada, inspirada en la humana, con un potente modelo de aprendizaje que respeta el papel de la acción, este trabajo muestra cómo los robots pueden construir un sentido del tacto más profundo. En lugar de depender solo de cámaras o umbrales simples de fuerza, las máquinas del futuro podrían sentir cómo un objeto cede, vibra y cambia mientras lo exploran, y ajustar su agarre o movimiento sobre la marcha. Tales capacidades son clave para aplicaciones como la palpación médica, el manejo de alimentos blandos y la manipulación de objetos deformables en hogares y fábricas. En términos sencillos, el estudio demuestra que para tocar el mundo con tanta eficacia como nosotros, los robots no solo necesitan buenos sensores, sino también el “cuerpo” adecuado, los hábitos de movimiento correctos y una forma inteligente de entrelazar toda esa información en una comprensión coherente de lo que están sintiendo.
Cita: Dutta, A., WM Devillard, A., Zhang, Z. et al. Embodied tactile perception of soft objects properties. npj Robot 4, 15 (2026). https://doi.org/10.1038/s44182-026-00077-0
Palabras clave: toque robótico, piel electrónica, detección de objetos blandos, percepción táctil, robótica incorporada