Clear Sky Science · es
GenHand: retargeting cinemático generalizado del agarre humano
Enseñar a los robots a sujetar objetos como nosotros
Desde levantar una taza de café hasta girar un destornillador, nuestras manos hacen que manejar objetos parezca sencillo. Los robots, sin embargo, a menudo tienen dificultades para agarrar objetos cotidianos de forma fiable, especialmente cuando sus pinzas no se parecen en nada a una mano humana. Este artículo presenta GenHand, un sistema que aprende de los movimientos de la mano humana en imágenes habituales y los convierte en agarres estables y de estilo humano para muchos tipos diferentes de manos robóticas.
Por qué las manos robóticas necesitan algo más que movimientos copiados
Muchos sistemas actuales de teleoperación y aprendizaje por imitación intentan copiar directamente la pose de una mano humana en una mano robótica. Igualan las posiciones de las yemas de los dedos y los ángulos articulares lo más fielmente posible. Esto funciona solo cuando la mano robótica se parece mucho a una mano humana y tiene un número similar de dedos y articulaciones. En cuanto la pinza robótica es más simple —por ejemplo, solo dos dedos planos— la pose copiada puede dejar de producir un agarre seguro. Estos enfoques también suelen ignorar la forma del objeto y dónde debe producirse el contacto sólido, por lo que los agarres resultantes pueden resbalar, perder el equilibrio o no tocar la superficie correctamente.
Mirar la mano y el objeto juntos
GenHand aborda este problema enfocándose en la interacción entre la mano y el objeto, no solo en la forma de la mano. Partiendo de una imagen RGB corriente, el sistema reconstruye un modelo 3D detallado del objeto y un modelo 3D paramétrico de la mano humana. Utiliza una red neuronal para inferir la pose de la mano y una representación avanzada de "distancia firmada" para recuperar la superficie del objeto. A partir de este par de modelos, GenHand determina dónde las yemas humanas hacen realmente contacto y en qué direcciones ejercen fuerza sobre el objeto. A continuación agrupa esos puntos de contacto en un pequeño conjunto de regiones significativas y direcciones de fuerza que resumen la estructura esencial del agarre humano mientras filtran detalles innecesarios.
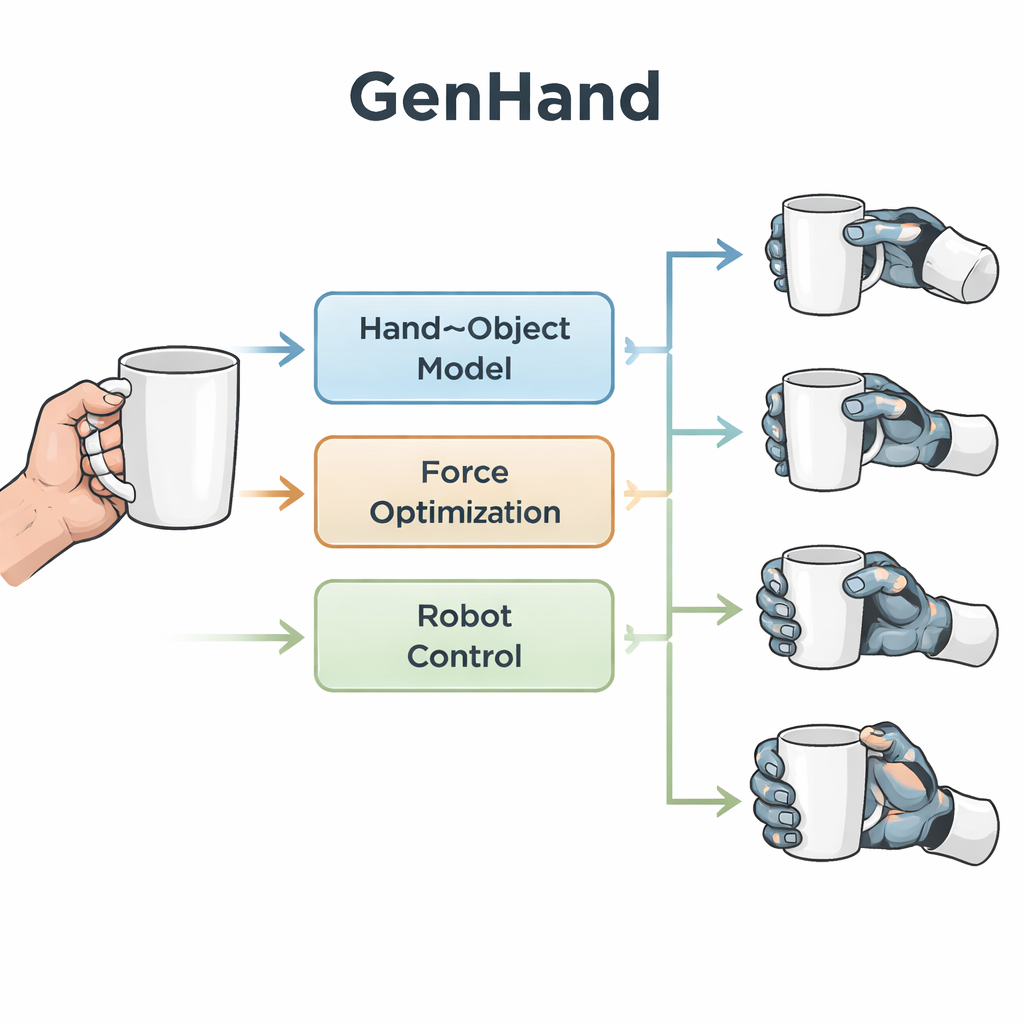
Reinventar el agarre para cada robot
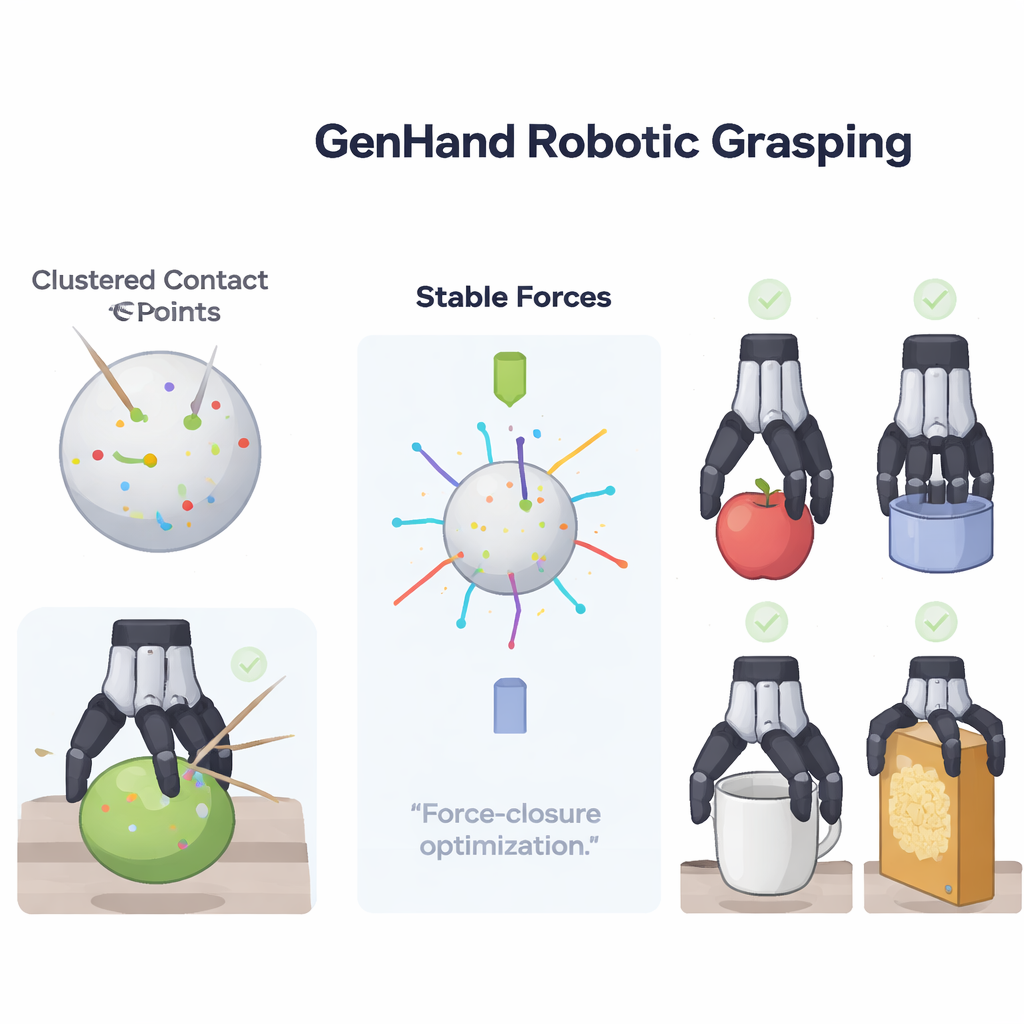
Una vez que GenHand entiende las regiones de contacto clave y cómo soportan el objeto, construye un nuevo conjunto de "anclas de contacto" que se adapten a la pinza robótica particular. Para una pinza simple de dos dedos, puede mantener solo dos regiones de contacto opuestas, como un par de pulgares que aprietan una caja. Para manos más hábiles con tres, cuatro o cinco dedos, puede asignar anclas adicionales para ajustarse mejor al rico patrón de contacto del agarre humano. Un paso de optimización matemática busca entonces ubicaciones de contacto en la superficie del objeto que puedan equilibrar fuerzas y torques en todas las direcciones, una propiedad conocida como cierre de fuerzas. Crucialmente, GenHand se mantiene cercano a los contactos humanos originales al tiempo que exige que el agarre resultante sea físicamente estable en el mundo real.
De contactos estables a movimientos reales del robot
Con las anclas de contacto estables definidas, una segunda etapa de optimización encuentra ángulos articulares reales y movimientos de muñeca para el robot que puedan materializar esas anclas sin violar los límites articulares ni provocar colisiones con el objeto. Para ello, GenHand empareja repetidamente los posibles sitios de contacto del robot con las anclas deseadas, ajusta la pose y comprueba si los eslabones penetran el objeto. Este proceso se aplica a una variedad de manos robóticas —desde una sencilla pinza Robotiq de dos dedos hasta una mano Shadow altamente articulada de cinco dedos— y se prueba en simulación física. En comparación con una línea base líder que solo imita la geometría de las yemas, GenHand produce un desequilibrio de fuerzas mucho menor, un contacto superficial más preciso y tasas de éxito significativamente superiores al levantar y sostener 20 objetos cotidianos en diferentes condiciones de fricción.
Hacia dónde puede llevar esto a los robots cotidianos
Para un lector no experto, la conclusión es que GenHand da a los robots un mejor sentido de "cómo" sujetar las cosas, no solo de "dónde" colocar los dedos. Al aprender de agarres humanos reales y aplicar reglas básicas de estabilidad física, puede retargetear la misma demostración humana a manos robóticas muy diferentes manteniendo agarres sólidos y fiables. Esto facilita el control de robots teleoperados, ayuda a los sistemas de aprendizaje a entrenar con ejemplos más ricos y nos acerca a robots domésticos y de trabajo que puedan manipular de forma segura la misma amplia variedad de objetos que las personas.
Cita: Qi, L., Popoola, O., Imran, M.A. et al. GenHand: generalised human grasp kinematic retargeting. npj Robot 4, 19 (2026). https://doi.org/10.1038/s44182-026-00076-1
Palabras clave: agarre robótico, teleoperación, demostración humana, manos robóticas, manipulación