Clear Sky Science · es
Pinza robótica miniatura asequible impresa en 3D con cámara integrada para detección de fuerza y par basada en visión
Por qué importan las pinzas blandas diminutas
Los robots son cada vez más pequeños y realizan trabajos más delicados, desde montar engranajes minúsculos hasta recoger bayas maduras sin aplastarlas. Pero la mayoría de las manos robóticas aún aprietan a ciegas, con poca noción de la intensidad de la presión. Este artículo presenta una pinza miniatura de bajo coste impresa en 3D, apodada “Seezer”, que puede tanto agarrar objetos frágiles como «sentir» fuerzas usando una minúscula cámara dentro de las yemas de sus dedos en lugar de costosos sensores de fuerza.
Una mano delicada que ve
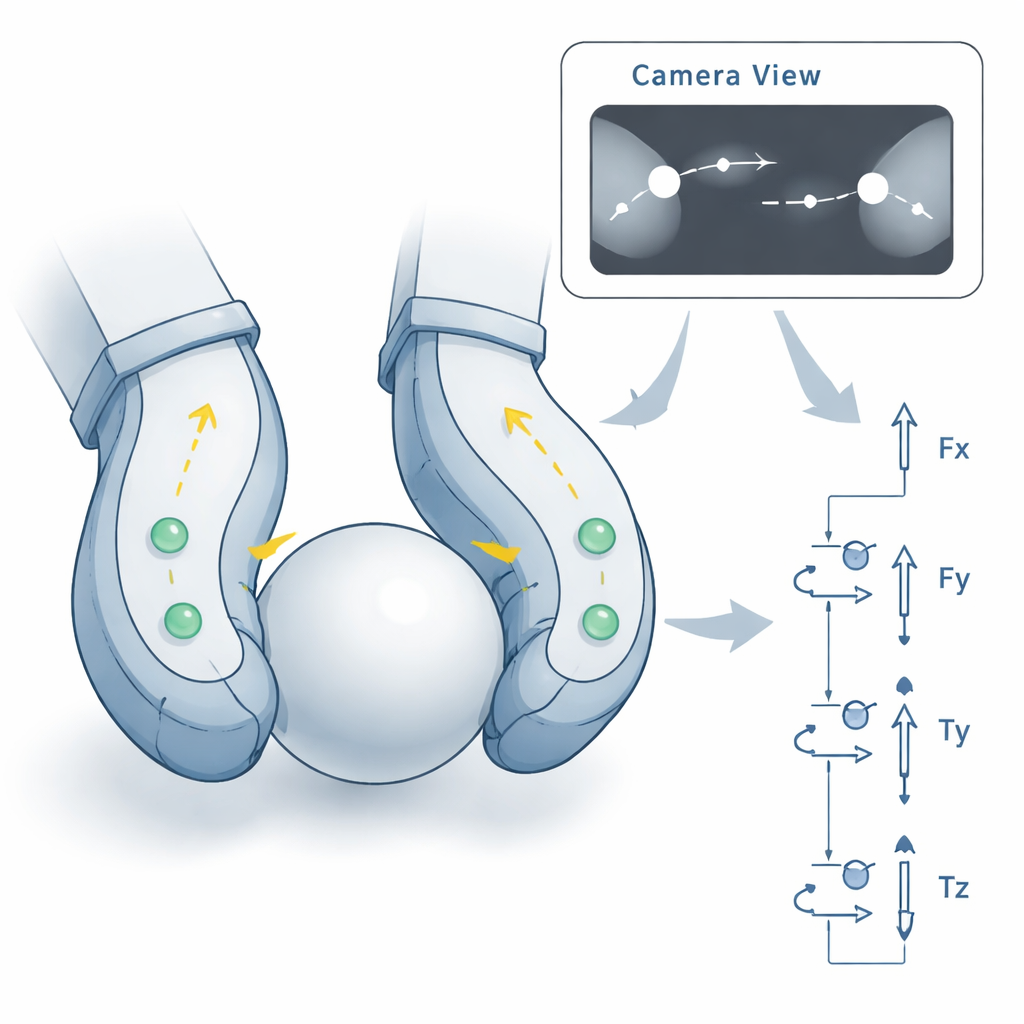
El Seezer es una pinza robótica blanda y compliant cuyos dedos se flexionan en lugar de articularse como alicates metálicos. La idea clave es fabricar casi todo en una sola pieza en una impresora 3D de consumidor: una pieza monolítica del dedo que incluye articulaciones flexibles, formas de la yema adaptadas a la tarea y pequeños marcadores integrados. Este módulo de dedo desechable se desliza sobre una unidad motriz compacta que alberga una cámara diminuta y luces. Al girar el motor un engranaje sin fin, las articulaciones flexibles se doblan y los dedos se cierran alrededor del objeto, mientras la cámara observa las yemas y el espacio frente a la pinza.

Leer la fuerza a partir de las flexiones del dedo
En vez de incrustar cables, galgas extensométricas o almohadillas de presión en los dedos, el Seezer pinta el interior con señales visuales ricas en información. Cada yema lleva pequeños marcadores circulares «fiduciales» cuya posición en la imagen de la cámara cambia siempre que el dedo se deforma. El software detecta y sigue estos marcadores en cada fotograma. Luego, a partir de una breve secuencia de calibración, modelos matemáticos sencillos aprenden cómo los desplazamientos de los marcadores se relacionan con las fuerzas reales de empuje y tracción en cada yema. Al combinar las fuerzas de las tres yemas con física básica, el sistema estima las fuerzas y torsiones totales sobre la pinza en las seis direcciones, además de la fuerza de apriete entre los dedos.
Qué tan bien percibe las fuerzas
Para comprobar la precisión de esta detección basada en cámara, los autores compararon las estimaciones del Seezer con lecturas de un sensor comercial de fuerza/torque de alta precisión en un montaje de laboratorio controlado. Con una versión del diseño del dedo (yemas más rígidas), la pinza midió fuerzas de agarre de hasta unos 1,1 newton con errores típicos entre el 8% y el 17%, y fuerzas y torques en seis ejes con errores mayoritariamente entre el 8% y el 24%. Una versión con yema más blanda sacrificó fuerza máxima por mayor sensibilidad, produciendo fuerzas menores pero con errores porcentuales comparables. Es importante que los modelos necesitaron sólo entre 31 y 141 puntos de calibración, muy por debajo de los miles de imágenes que suelen requerir los métodos de aprendizaje profundo que trabajan con fotogramas completos de cámara.
De engranajes diminutos a bayas suaves
Dos tareas de demostración ilustran lo que esta pinza podría hacer en entornos reales. En una, el Seezer recogió repetidamente pequeños engranajes impresos en 3D de ejes, los desplazó y los colocó de nuevo, usando la cámara interna tanto para alinear la chaveta del engranaje con el eje como para supervisar el movimiento del dedo. Esto imita trabajos de ensamblaje industrial fino en espacios reducidos. En otra, la pinza cosechó grosellas rojas de sus tallos. Allí, el sistema vigiló en tiempo real la fuerza de apriete estimada y dejó de cerrarse al alcanzar un umbral prefijado, de modo que la baya se arrancó sin aplastarse. Ambos ejemplos funcionaron con electrónica económica y mostraron que un mismo diseño puede manejar objetos rígidos y blandos de unos pocos milímetros.
Desafíos y usos futuros
El Seezer sigue siendo una prueba de concepto y tiene limitaciones. El seguimiento de marcadores funciona mejor en escenas estables y bien iluminadas con fondos poco recargados; cambios de iluminación, superficies brillantes y movimientos complejos pueden causar errores de seguimiento. La modesta tasa de fotogramas de la cámara también limita la rapidez con que el sistema puede reaccionar para control de fuerza fino o una realimentación háptica rica. Los materiales de los dedos pueden fatigarse o cambiar de comportamiento con un uso prolongado, y el equipo aún no ha probado sistemáticamente el rendimiento a lo largo del tiempo. Los autores sostienen que algoritmos de seguimiento más robustos o combinar su hardware con estimadores de fuerza basados en aprendizaje profundo modernos podría mejorar la precisión y fiabilidad, mientras que los avances en impresión 3D deberían permitir más miniaturización y dedos desechables esterilizables para uso quirúrgico o de laboratorio.
Qué implica esto para la robótica cotidiana
En términos sencillos, este trabajo demuestra que una mano robótica pequeña y barata puede ver y sentir observando cómo se doblan sus propios dedos blandos. Con sólo datos de calibración modestos y piezas comerciales, el Seezer estima con suficiente precisión cuánta fuerza aplica y hacia dónde actúan las fuerzas y torques de contacto, lo bastante para tareas de manipulación delicada. Si se mejora su robustez, el mismo enfoque podría ayudar a futuros robots a manejar objetos pequeños y frágiles—como dispositivos médicos, componentes electrónicos, fruta o incluso tejido en cirugía mínimamente invasiva—sin sensores voluminosos ni hardware complejo, llevando un tacto sensible a lugares donde el espacio y el coste son críticos.
Cita: Duverney, C., Gerig, N., Hüls, D. et al. Affordable 3D-printed miniature robotic gripper with integrated camera for vision-based force and torque sensing. npj Robot 4, 10 (2026). https://doi.org/10.1038/s44182-026-00075-2
Palabras clave: pinza robótica blanda, detección de fuerza basada en visión, robótica impresa en 3D, manipulación en miniatura, realimentación háptica