Clear Sky Science · es
Avances en robótica blanda: progresos recientes en actuadores dieléctricos elastoméricos y de fluido
Robots blandos que se mueven más como músculos
Imagínese un robot que pueda abrazar con seguridad a un niño, atravesar escombros en un edificio colapsado o masajear suavemente un corazón en fallo. Para hacer esas tareas, las máquinas deben doblarse y estirarse como lo hace el tejido vivo, no sonar a golpes de metal. Este artículo de revisión explica cómo una nueva clase de “músculos” eléctricos blandos —fabricados con sólidos y líquidos elásticos— acerca esa visión a la realidad, y qué desafíos permanecen antes de que salgan del laboratorio y entren en la vida cotidiana.
De los motores rígidos a los músculos eléctricos blandos
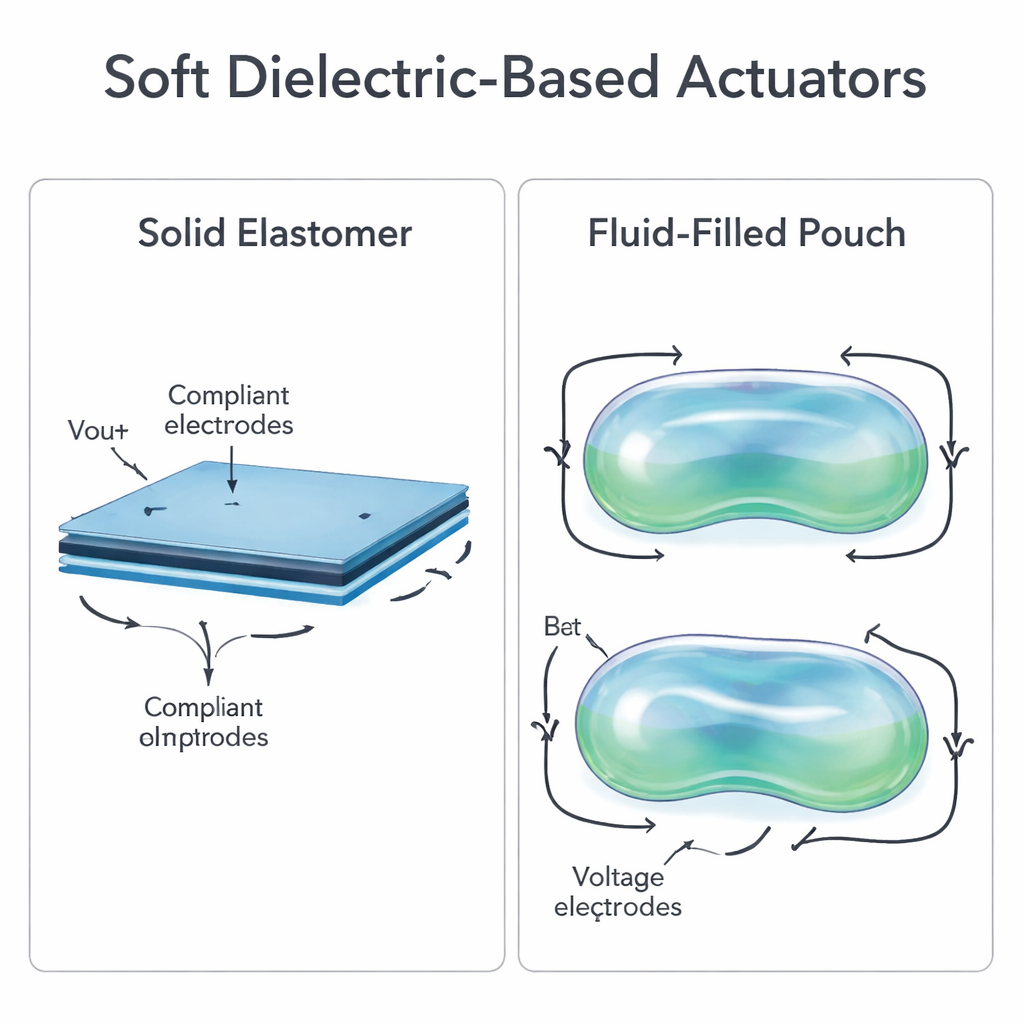
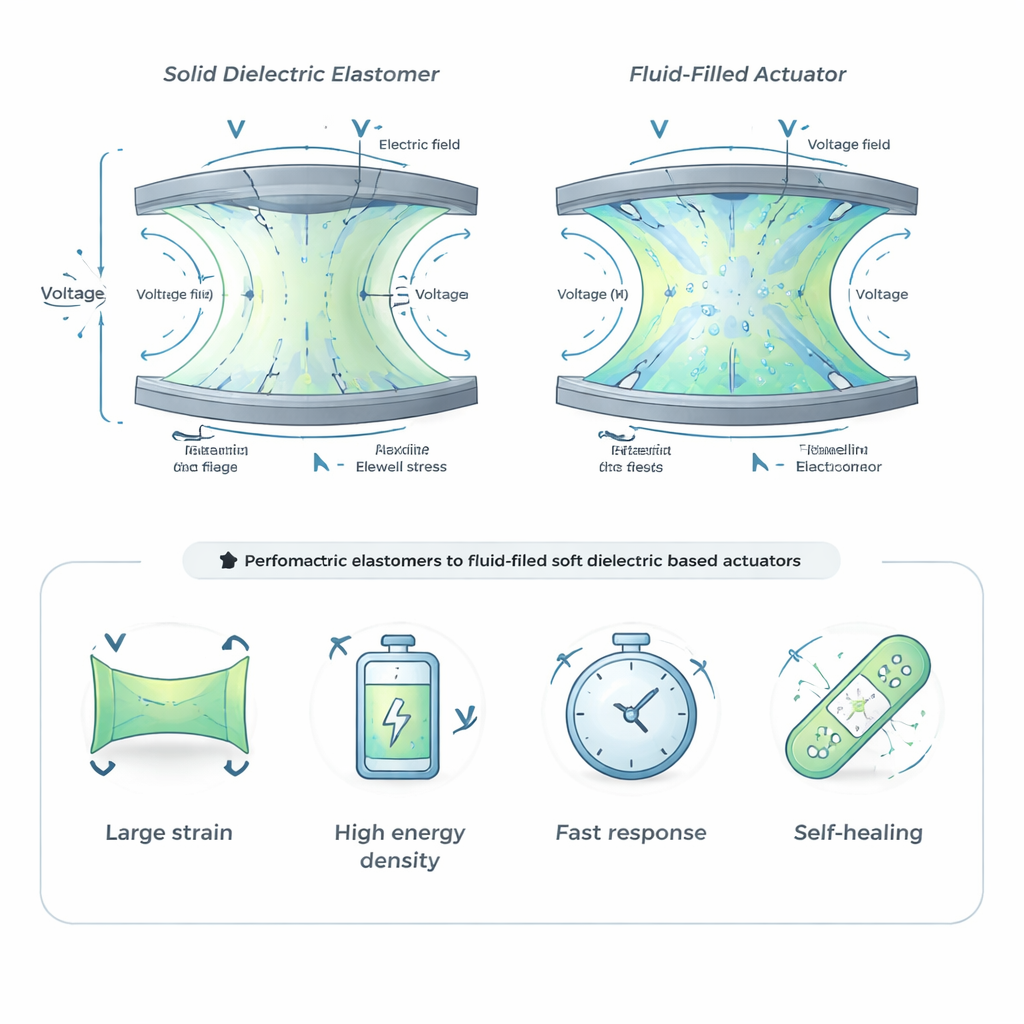
La mayoría de los robots industriales dependen de motores y engranajes pesados y rígidos. Son potentes y precisos, pero también caros, frágiles y potencialmente peligrosos en presencia de personas. Los robots blandos, construidos con materiales elásticos similares a los moldes de silicona o bandas elásticas, cambian la fuerza bruta por la suavidad, la adaptabilidad y la resiliencia. El foco de este artículo son los actuadores blandos accionados por electricidad: actuadores dieléctricos elastoméricos (ADA), que usan una capa de caucho sólida, y actuadores dieléctricos de fluido (ADF), que emplean un líquido aislante eléctrico sellado en una bolsa flexible. En ambos casos, aplicar una tensión entre dos electrodos conformables comprime el material mediante fuerzas electrostáticas y convierte la energía eléctrica directamente en movimiento con gran deformación, alta densidad energética y respuesta rápida.
Cómo los materiales hacen funcionar los músculos
Para comportarse como músculos útiles, estos dispositivos necesitan materiales muy específicos. En los ADA, la lámina central de caucho debe ser extremadamente blanda para estirarse con facilidad, pero también resistir campos eléctricos altos sin desgarrarse ni producir cortocircuitos. Los investigadores afinan este equilibrio con dos estrategias principales. Una es diseñar nuevos polímeros —desde acrílicos, siliconas y poliuretanos hasta copolímeros en bloque más exóticos— que incorporen muchos grupos químicos polares (que aumentan la respuesta eléctrica) en redes flexibles y de baja rigidez. La otra es crear composites mezclando partículas diminutas o líquidos que aumenten la capacidad del material para almacenar energía eléctrica. Un razonamiento similar guía el diseño de ADF: los ingenieros eligen aceites y otros líquidos dieléctricos con la viscosidad, estabilidad y compatibilidad adecuadas con cápsulas finas de plástico o silicona, de modo que la tensión pueda desplazar el fluido rápidamente para crear abultamientos, carreras y vibraciones sin fugas ni degradación química.
Fabricar y accionar actuadores blandos a escala
Convertir estos materiales ingeniosos en dispositivos fiables es en sí un reto de ingeniería. La fabricación tradicional a menudo implica pasos manuales laboriosos: estirar películas finas sobre marcos, pintar o imprimir electrodos flexibles, apilar capas y —en el caso de los ADF— inyectar el líquido y sellar la bolsa. El artículo repasa rutas de fabricación más recientes como la impresión por inyección de tinta y serigráfica, la extrusión de músculos tipo hilo y la impresión 3D multimaterial que puede depositar electrodos y dieléctricos en una sola pasada. También explica cómo diferentes geometrías producen distintos movimientos: parches planos que aumentan su área, cúpulas que emergen, cilindros enrollados que se contraen en longitud y estructuras que se doblan o vibran. Dado que estos materiales pueden envejecer, tener fugas o fallar por descargas eléctricas, los autores resumen estudios de vida útil y modos comunes de fallo, y subrayan el impulso hacia diseños autorreparables que puedan recuperarse tras una chispa o una perforación.
Control más inteligente y usos emergentes
Como los músculos naturales, los actuadores blandos deben controlarse. Los esquemas abiertos simples solo aplican un patrón de tensión, pero esto puede desviarse a medida que el material se calienta o experimenta fluencia. Enfoques más avanzados integran sensores —o usan las propias señales eléctricas del actuador— para medir deformación, fuerza o vibración en tiempo real y ajustar la señal de accionamiento en consecuencia. Los investigadores experimentan ahora con controladores basados en aprendizaje automático y aprendizaje por refuerzo que pueden lidiar con el comportamiento no lineal y dependiente de la historia de los materiales blandos. En el plano de aplicaciones, el artículo recorre un amplio panorama: músculos artificiales que levantan muchas veces su propio peso, robots semejantes a peces o insectos que nadan o vuelan, bandas hápticas y almohadillas para yemas táctiles que proporcionan retroalimentación de tacto realista, lentes de zoom y superficies que moldean la luz inspiradas en calamares y ojos humanos, superficies cambiantes de forma y dispositivos médicos conceptuales que podrían algún día ayudar a corazones en fallo o rostros paralizados.
Qué aún separa las demostraciones de laboratorio de los robots del mundo real
A pesar de su promesa, estos músculos eléctricos aún afrontan obstáculos antes de poder alimentar con seguridad ayudantes domésticos, implantes médicos o dispositivos portátiles de consumo masivo. Muchos requieren tensiones de conducción del orden del kilovoltio, lo que complica la seguridad y la electrónica. Materiales que rinden de forma excelente en pruebas cortas pueden endurecerse, secarse o fallar tras millones de ciclos. La fabricación a menudo es demasiado lenta e inconsistente para la producción a gran escala. Y sigue siendo difícil reciclar o biodegradar la mayoría de los polímeros actuales. Los autores sostienen que el progreso dependerá del codiseño a múltiples escalas: nuevos materiales blandos que combinen baja rigidez, alta respuesta eléctrica, robustez e incluso autorreparación; fabricación y pruebas automatizadas guiadas por datos; y sistemas de control que exploten sensores integrados e IA ligera. Juntos, estos avances podrían dotar a los robots del futuro de músculos que no solo sean fuertes y rápidos, sino también seguros, adaptativos y sostenibles.
Cita: Molla, M.H.O.R., Chen, J. & Xu, C. Advancing soft robotics: recent progress in dielectric elastomer and fluid actuators. npj Robot 4, 17 (2026). https://doi.org/10.1038/s44182-026-00074-3
Palabras clave: robótica blanda, actuadores dieléctricos elastoméricos, actuadores dieléctricos de fluido, músculos artificiales, interfaces hápticas