Clear Sky Science · es
Control predictivo basado en juegos para asistencia interactiva personalizada y dirigida
Robots que se sienten como buenos compañeros de entrenamiento
Imagínese un compañero de ejercicios o un fisioterapeuta que siempre sabe cuándo ayudarle a levantar, cuándo dejarle esforzarse un poco y con qué intensidad planea moverse a continuación. Este artículo muestra cómo dotar a robots de contacto —como exoesqueletos usados en rehabilitación o en fábricas— de una intuición similar. Al «adivinar» matemáticamente cómo una persona piensa moverse en el próximo segundo o dos, el robot puede compartir el esfuerzo de forma fluida, reducir la fatiga y guiar sutilmente cómo la gente se mueve y aprende.
Por qué es difícil compartir el esfuerzo con robots
Cuando un robot está físicamente conectado a una persona —ayudándole a mover un miembro o a transportar un objeto pesado— ambos están constantemente empujando y reaccionando. Los controladores robóticos tradicionales suelen ignorar en gran medida lo que el humano planea hacer; simplemente persiguen objetivos de rendimiento como precisión o ahorro de energía. Eso puede hacer que el robot sea demasiado rígido y mandón, o demasiado pasivo e inútil. Los compañeros humanos reales lo hacen mejor: perciben cómo se mueve el otro, se adaptan a sus capacidades y fomentan distintos comportamientos, desde la relajación hasta el esfuerzo intenso. Los autores sostienen que, para acercar a los robots a este tipo de interacción, el robot debe modelar explícitamente cómo el humano planifica movimientos y cuánto esfuerzo está dispuesto a invertir.
Una visión de teoría de juegos de la interacción humano–robot
Los investigadores se basan en la teoría de juegos —las matemáticas de la interacción estratégica— para tratar al humano y al robot como dos «jugadores» que comparten la misma tarea. Cada uno tiene sus propios objetivos: el humano quiere seguir el movimiento deseado gastando el menor esfuerzo posible, y el robot quiere ayudar a seguir el movimiento reduciendo además el esfuerzo de la persona. De forma crucial, se asume que ambos solo miran a corto plazo, sobre una ventana de planificación finita de aproximadamente uno o dos segundos, reflejando cómo la gente planifica naturalmente los movimientos. Dentro de esa ventana, el equipo deriva una fórmula compacta para un equilibrio de Nash: un patrón equilibrado de fuerzas en el que ni el humano ni el robot pueden mejorar su resultado sin que el otro cambie también. Este equilibrio define cuánto debe empujar cada uno en cada momento.
Enseñar al robot a leer la intención humana
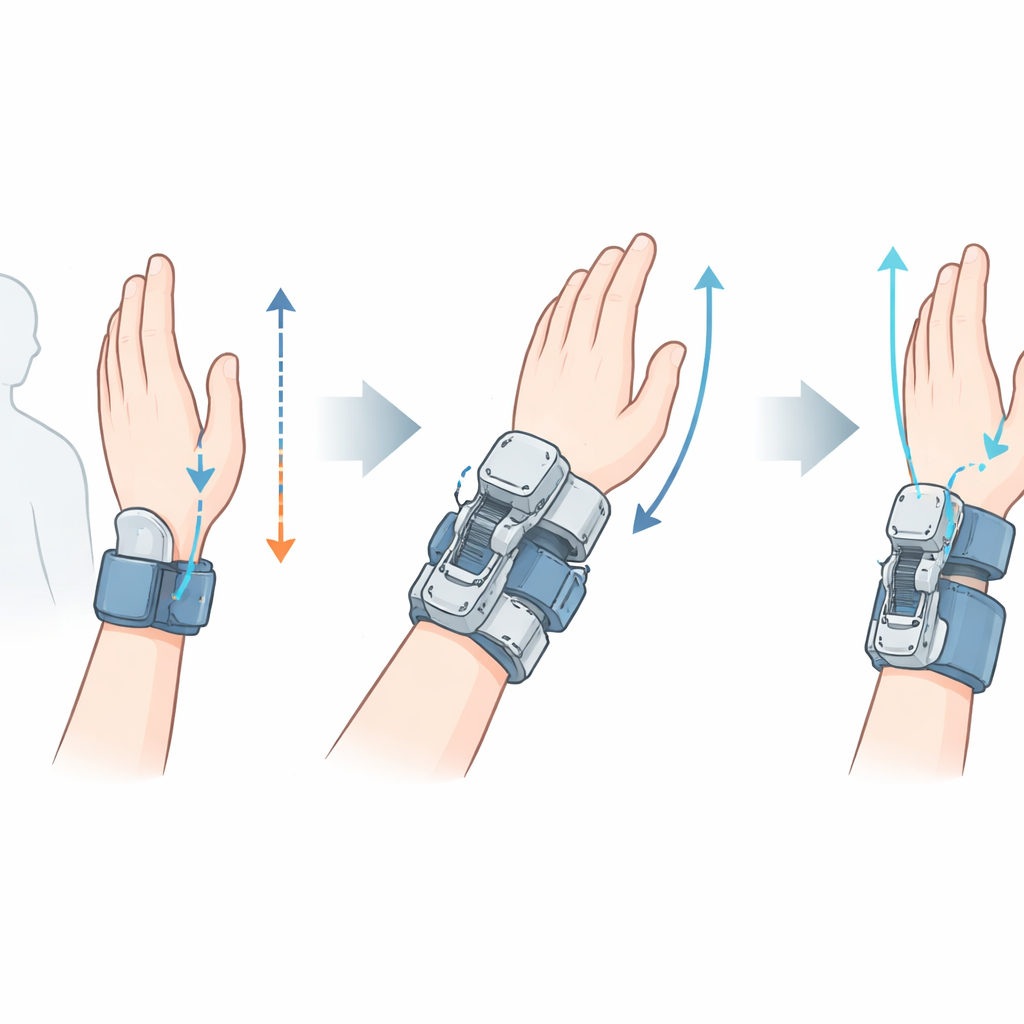
Para que el robot juegue este «juego del movimiento», primero debe inferir cuánto valora el humano la precisión frente al esfuerzo —una preferencia oculta que varía entre personas e incluso en el tiempo. Los autores resuelven esto con un enfoque de juego inverso. A medida que la persona se mueve, los sensores miden el ángulo articular y el torque que produce. El controlador busca repetidamente el conjunto de preferencias humanas que mejor expliquen la historia reciente de movimientos y fuerzas. Con esas preferencias, predice cómo es probable que actúe el humano en el próximo horizonte corto y calcula la fuerza de asistencia óptima del robot. Todo esto se ejecuta en tiempo real en un exoesqueleto de muñeca que ayuda a los sujetos a seguir un objetivo en movimiento con la mano.
Humanos y robots aprenden a coordinarse
El equipo probó su controlador con treinta adultos sanos en tres experimentos. En el primero, se pidió a las personas que alternaran entre seguir activamente el objetivo y permanecer pasivas. El controlador ajustó rápidamente su estimación interna de cuánto les importaba la precisión, aumentando durante las fases activas y cayendo cerca de cero cuando se relajaban. En el segundo experimento, los participantes alternaron entre ensayos con y sin asistencia robótica. Con el nuevo controlador, el robot redujo el esfuerzo articular humano y la actividad muscular, al tiempo que mejoró la precisión del seguimiento. Tras ensayos repetidos, el patrón de interacción de cada persona se estabilizó en un «equilibrio» individual y la correlación entre fuerzas humanas y robóticas aumentó —prueba de una comprensión mutua creciente. En el tercer experimento, los investigadores introdujeron una única perilla de asistencia, un meta-parámetro que desplaza la intensidad con la que el robot intenta minimizar el esfuerzo de la persona. Girar esa perilla cambió de forma continua cuánto esfuerzo elegían aportar los humanos, sin degradar el rendimiento en la tarea.
Dirigir el comportamiento con una sola perilla
El meta-parámetro de asistencia permite a los diseñadores abarcar un espectro de estilos de interacción con un único control: desde casi ninguna ayuda, pasando por un reparto equitativo del esfuerzo, hasta un apoyo casi total donde el robot lidera y el humano puede relajarse. En ajustes intermedios, los humanos tendieron a coordinarse mejor con el robot, cada uno soportando aproximadamente la mitad de la carga. El patrón de preferencias humanas inferidas se mantuvo consistente para cada persona a través de distintos niveles de asistencia —excepto cuando el robot hacía prácticamente todo, momento en el que los comportamientos se uniformizaron porque la gente dejó de implicarse en gran medida. Esto demuestra que el robot puede tanto descubrir estilos de control individuales como incentivarlos suavemente, por ejemplo pidiendo a los usuarios que hagan más en una fase de entrenamiento y menos en otra.
Qué significa esto para la rehabilitación y el trabajo
Para un lector no especializado, el mensaje clave es que este controlador hace que los robots actúen más como compañeros inteligentes que como máquinas rígidas. Al predecir cómo vamos a movernos y ajustar cuánto ayudan, los robots pueden reducir nuestro esfuerzo cuando es necesario, incentivarnos a esforzarnos más cuando conviene y mantener los movimientos precisos y estables. El mismo marco matemático puede ajustarse para la rehabilitación —trasladando gradualmente el esfuerzo del robot al paciente— o para la fabricación colaborativa, donde personas y robots comparten cargas de forma segura y eficiente. En esencia, el estudio muestra que las personas se adaptan naturalmente a un robot que «juega el mismo juego» que ellas, abriendo la puerta a formas de asistencia interactiva más personalizadas y dirigidas.
Cita: Hafs, A., Farr, A., Verdel, D. et al. Model predictive game control for personalized and targeted interactive assistance. Commun Eng 5, 57 (2026). https://doi.org/10.1038/s44172-026-00605-8
Palabras clave: interacción humano-robot, asistencia con exoesqueleto, control teórico de juegos, rehabilitación motora, control compartido