Clear Sky Science · es
Trampeo acústico en tiempo real facilitado por aprendizaje automático en entornos multimédium variables en el tiempo hacia la manipulación de microburbujas guiada por imágenes de resonancia magnética
Guiando diminutos transportadores de fármacos con sonido y exploraciones
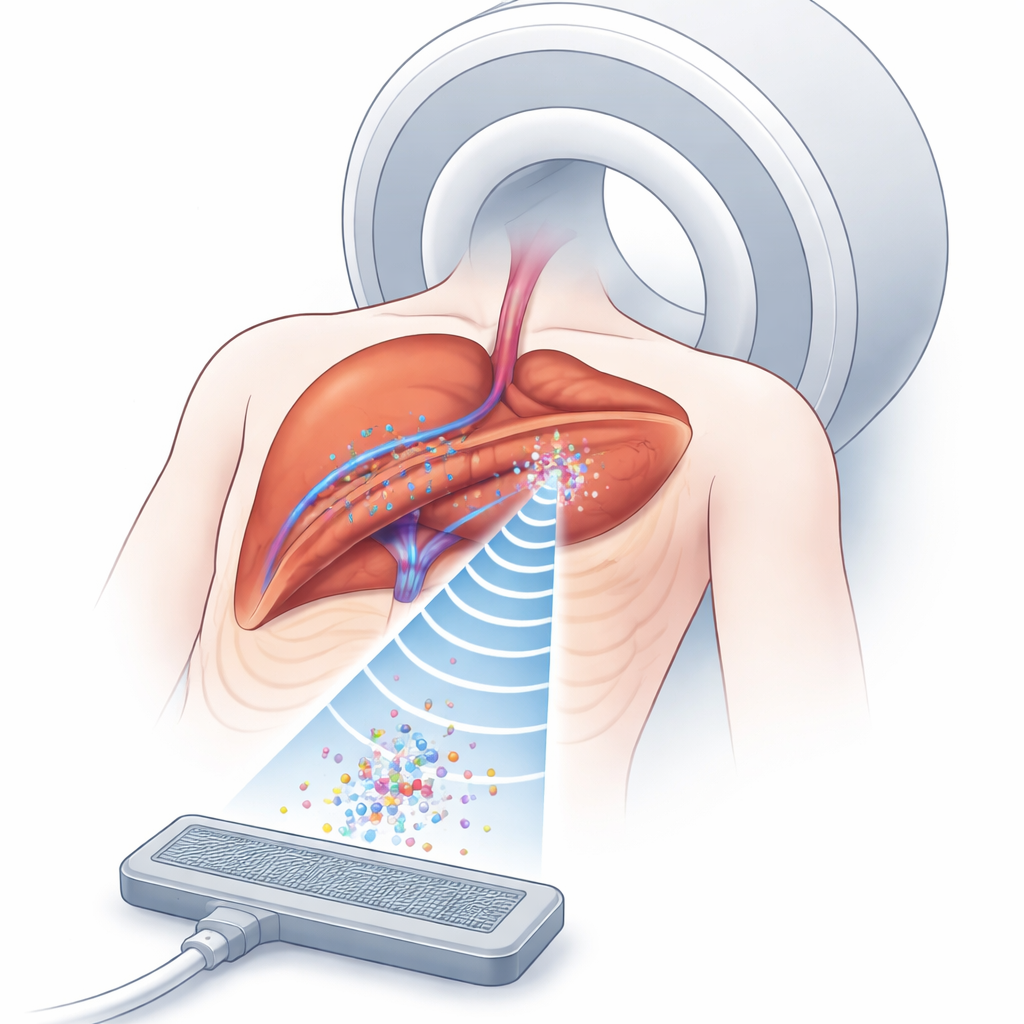
Los tratamientos modernos contra el cáncer dependen cada vez más de transportadores inteligentes de fármacos que pueden entregar medicación directamente a los tumores preservando el tejido sano. Este estudio explora una forma futurista de dirigir dichos transportadores dentro del cuerpo usando “trampas” de ultrasonido guiadas por imágenes por resonancia magnética (RM). Al combinar ondas sonoras, imagen médica y aprendizaje automático, los investigadores pretenden mantener microburbujas microscópicas cargadas con fármacos estacionadas cerca de tumores en movimiento, incluso cuando el cuerpo se desplaza con cada respiración.
Por qué importa atrapar microburbujas
Las microburbujas transportadoras de fármacos circulan por los vasos sanguíneos y pueden liberar su carga cuando se activan con ultrasonidos. El reto es mantener suficientes de estas burbujas en el lugar adecuado, durante el tiempo necesario y en profundidad dentro del cuerpo. El ultrasonido puede crear bolsillos invisibles de fuerza —trampas acústicas— que sostienen pequeños objetos en medio de un fluido sin contacto físico. La RM, por su parte, puede ver tanto el tejido como el patrón de efectos del ultrasonido, incluso dentro de los órganos. Unir estas dos herramientas ofrece una manera de concentrar transportadores de fármacos alrededor de tumores con mayor precisión que con los fármacos solos. Pero en personas reales, tejidos de distintos tipos —grasa, músculo, órganos y pulmones en movimiento— refractan y distorsionan las ondas sonoras, lo que dificulta enormemente formar y mantener una trampa estable exactamente en la ubicación del tumor.
El problema de un cuerpo con capas y en movimiento
En entornos simples como el aire o el agua, los ingenieros ya saben cómo usar arreglos faseados de emisores ultrasónicos para empujar, tirar y hacer girar objetos diminutos. Dentro del cuerpo, sin embargo, el sonido debe atravesar múltiples capas con densidades y velocidades distintas, y las fronteras entre ellas provocan refracción y distorsión. Los métodos computacionales tradicionales pueden, en principio, corregir esto calculando cuánto tarda el sonido en viajar desde cada emisor hasta el punto objetivo. Pero tales enfoques dividen el cuerpo en millones de bloques diminutos y simulan la propagación de la onda a través de cada uno —un proceso extremadamente costoso en tiempo que solo funciona si los tejidos permanecen casi perfectamente quietos. Solo la respiración puede desplazar los tejidos abdominales varios milímetros, dejando obsoleta cualquier solución precomputada en muy poco tiempo.
Enseñar a un modelo a predecir las rutas del sonido
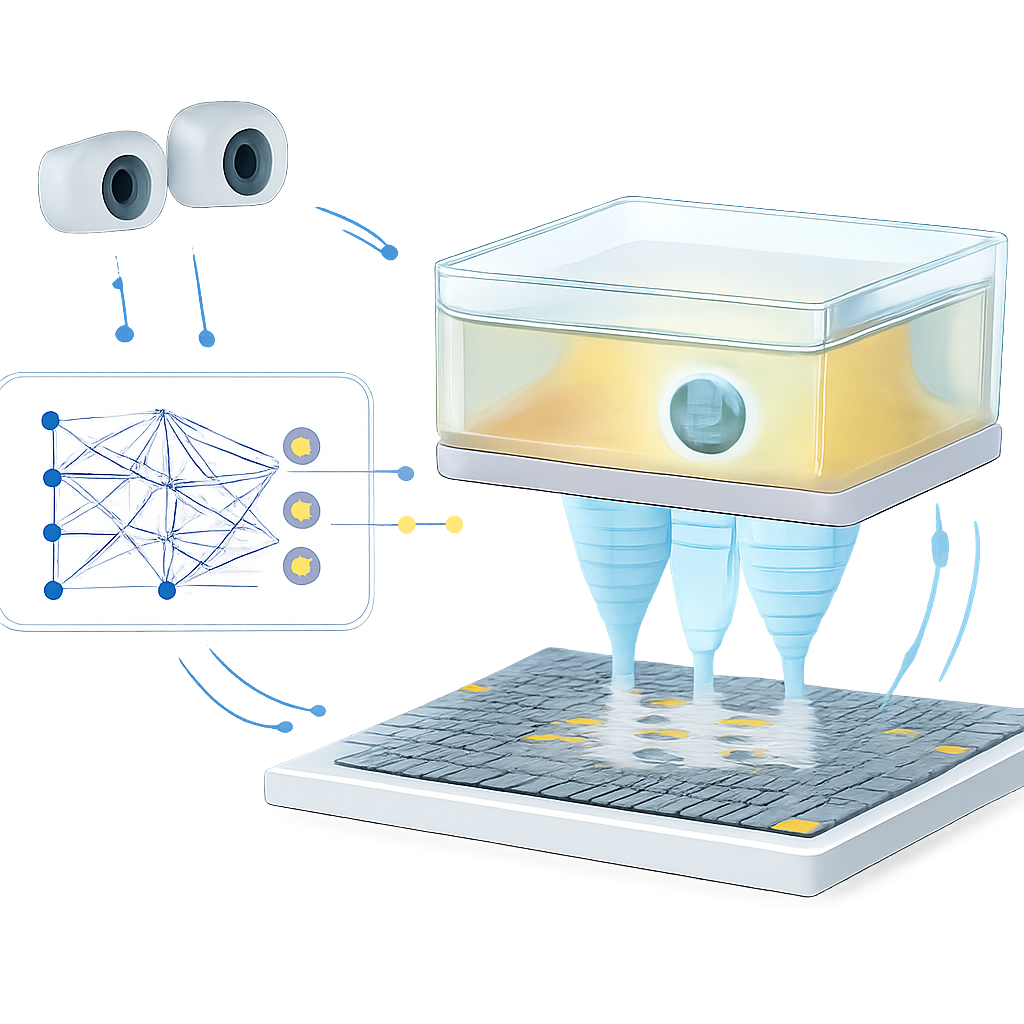
Los autores abordan este cuello de botella con un modelo basado en aprendizaje que actúa como un atajo rápido: en lugar de simular las ondas sonoras cada vez, entrenan una red neuronal para predecir cuánto tiempo necesitará cada pulso ultrasónico en llegar a un punto objetivo. Primero construyen un entorno virtual detallado usando una cámara llena de gas separada del aire por una película plástica fina, imitando cómo el sonido pasa por distintas capas de tejido. Con un simulador basado en física generan un conjunto de entrenamiento de tiempos de viaje del sonido entre muchos objetivos y una matriz ultrasónica de 14 por 14. También dejan que la cámara se desplace en dos direcciones para imitar el movimiento, y describen su posición siguiendo tres marcadores visuales, de forma similar a cómo en el futuro marcadores visibles en RM rastrearían la respiración del paciente. La red entrenada aprende a mapear la posición deseada de la trampa más la pose de la cámara directamente al patrón temporal requerido para los 196 emisores, logrando precisión a nivel de microsegundos en apenas unos 26 milisegundos.
Cerrando el lazo con visión y actualizaciones rápidas
La velocidad por sí sola no basta; la trampa también debe adaptarse cuando el entorno cambia inesperadamente. Para demostrarlo, el equipo construye un sistema de control en lazo cerrado. Cámaras estéreo observan una pequeña perla de poliestireno sostenida en el aire por la trampa acústica dentro de la cámara en movimiento. Cuando la perla se desvía de su objetivo más allá de un umbral establecido, el sistema desplaza ligeramente la posición objetivo, introduce las coordenadas actualizadas y la pose de la cámara en el modelo de aprendizaje y refresca rápidamente el patrón de fase que alimenta la matriz. En experimentos, el sistema puede actualizar el patrón de fase hasta 15 veces por segundo, guiando la perla a lo largo de trayectorias en forma de H, K y U con un error medio de aproximadamente 1 milímetro —comparable a la precisión de posicionamiento de algunos sistemas clínicos de ultrasonido focalizado. El mismo principio de retroalimentación también reduce el tiempo que la perla se aleja de su sitio previsto cuando la cámara se mueve, mostrando que el lazo de control puede compensar el movimiento y efectos no modelados procedentes de la película plástica y la estructura de soporte.
Qué significa esto para tratamientos futuros
Para un lector no especialista, el mensaje central es que los investigadores han construido una especie de “haz de tractor” remoto y sin contacto que algún día podría aparcar microburbujas cargadas con fármacos cerca de un tumor y mantenerlas allí, incluso mientras el paciente respira. Su modelo de aprendizaje sustituye simulaciones pesadas por un predictor rápido, mientras que las cámaras (y, en el futuro, marcadores visibles en RM) indican al sistema cómo se mueve el cuerpo para que la trampa pueda reajustarse al instante. Aunque el trabajo actual emplea aire, gases y plástico en lugar de tejidos reales, y levita una perla plástica en lugar de microburbujas auténticas, demuestra control en tiempo real en un medio en capas y en movimiento. Con hardware más potente, frecuencias ultrasónicas más altas y seguimiento de movimiento basado en RM, este enfoque podría evolucionar hacia una herramienta clínica para terapias por ultrasonido guiadas por RM y asistidas por robot que entreguen fármacos con mayor precisión y seguridad en las profundidades del cuerpo.
Cita: Wu, M., Li, X. & Tang, T. Machine learning-facilitated real-time acoustic trapping in time-varying multi-medium environments toward magnetic resonance imaging-guided microbubble manipulation. Commun Eng 5, 52 (2026). https://doi.org/10.1038/s44172-026-00600-z
Palabras clave: trampeo acústico, terapia guiada por RM, administración de fármacos con microburbujas, aprendizaje automático en ultrasonido, manipulación robótica no invasiva