Clear Sky Science · es
Seguimiento y control impulsados por rayos X sintéticos de dispositivos médicos en miniatura
Herramientas más pequeñas, cirugías más seguras
Los cirujanos empiezan a usar herramientas médicas diminutas y sin cables que pueden desplazarse por vasos sanguíneos y otros pasajes estrechos para administrar fármacos, abrir arterias obstruidas o medir señales vitales en lo profundo del cuerpo. Estos dispositivos en miniatura prometen procedimientos menos agresivos y recuperaciones más rápidas, pero solo si los médicos pueden verlos y pilotarlos de forma segura en tiempo real. Este artículo presenta MicroSyn-X, una nueva forma de entrenar a los ordenadores para rastrear estos diminutos dispositivos en imágenes de rayos X, allanando el camino para cirugías más precisas y menos invasivas.
El problema de los auxiliares invisibles
La herramienta de imagen quirúrgica de uso común hoy es la fluoroscopia por rayos X, que muestra sombras en movimiento de huesos, vasos e instrumentos en una pantalla. Sin embargo, los dispositivos en miniatura son tan pequeños y tenues que con frecuencia se confunden con el ruido de fondo. Pueden quedar ocultos por hueso, herramientas de metal o contrastes, y los robots blandos o líquidos cambian constantemente de forma mientras se mueven. Los operadores humanos deben vigilar la pantalla con atención y ajustar imanes o catéteres a mano, un proceso lento y fatigante que entraña riesgo de errores. Entrenar visión por computador —software que puede “ver” por sí mismo— podría ayudar, pero normalmente requiere colecciones enormes de imágenes cuidadosamente etiquetadas. Para estos nuevos dispositivos, esos conjuntos de datos apenas existen porque su recopilación es costosa, lenta y está limitada por la privacidad de los pacientes.
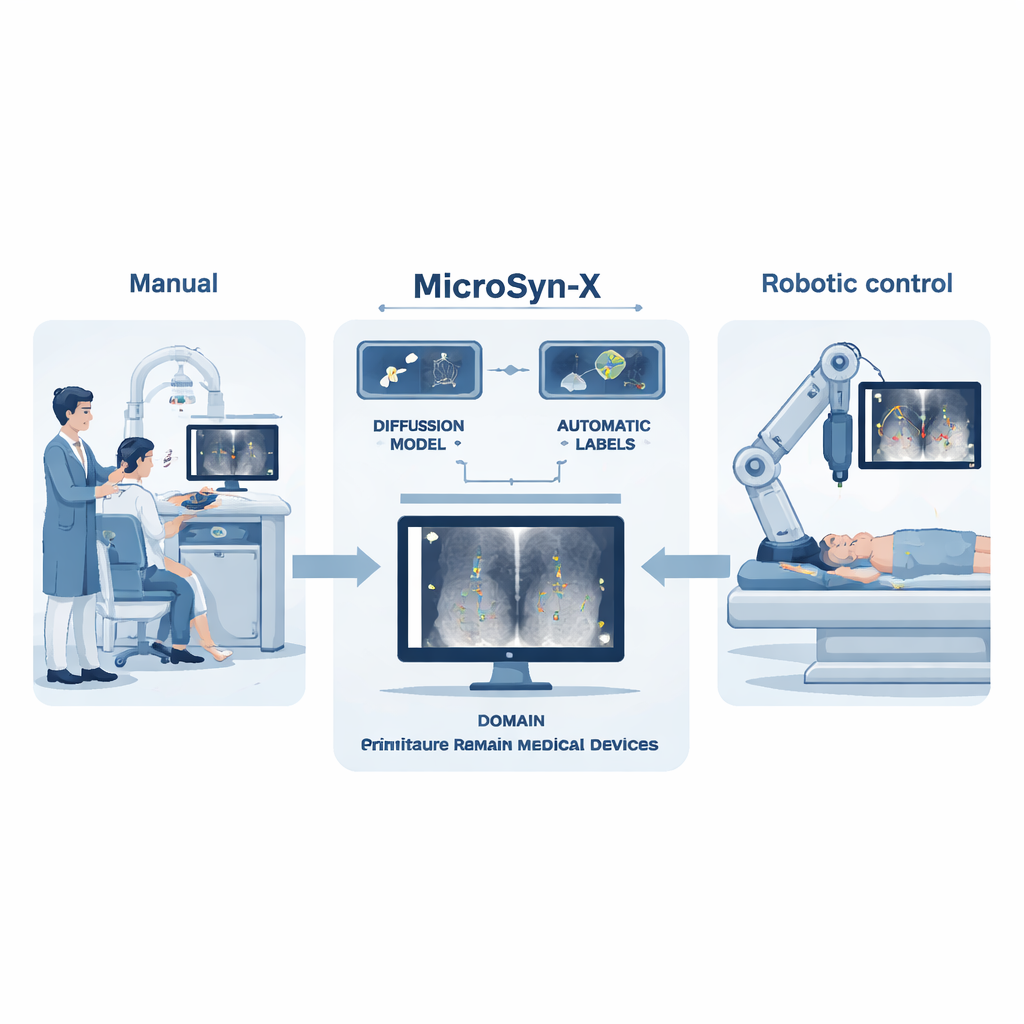
Enseñar a los ordenadores con rayos X falsos pero fieles
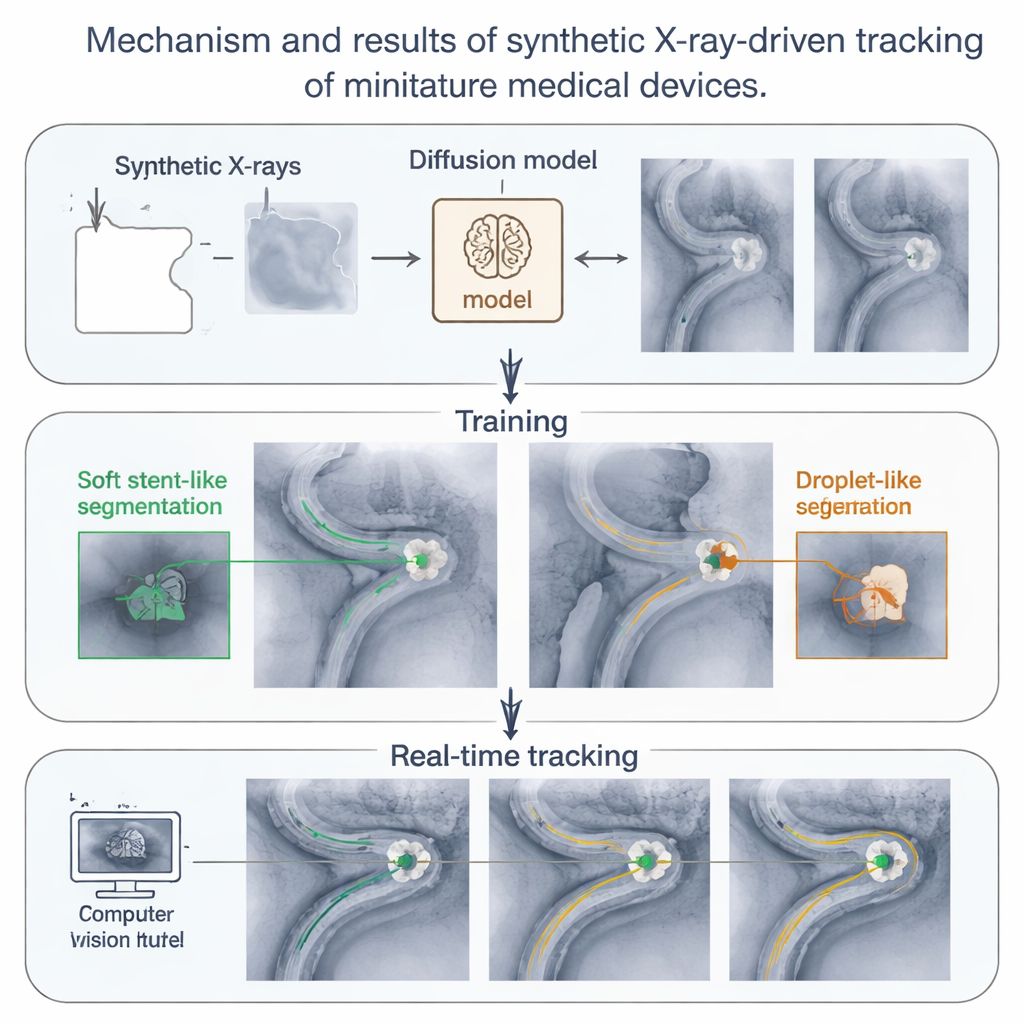
MicroSyn-X aborda este cuello de botella de datos creando sus propias imágenes de rayos X altamente realistas, completas con etiquetas integradas que indican exactamente dónde está cada dispositivo para el algoritmo de aprendizaje. Primero, el sistema usa un generador de imágenes moderno, llamado modelo de difusión, para producir fondos de rayos X verosímiles de órganos, huesos y herramientas quirúrgicas, guiado por indicaciones simples y máscaras aproximadas que señalan tejido, metal y canales llenos de líquido. Luego, imágenes de los dispositivos en miniatura —ya sea fotografiados una vez sobre un fondo neutro o descritos matemáticamente para gotas líquidas— se integran digitalmente en estas escenas para que parezca que realmente estuvieran dentro del cuerpo. Como el ordenador sabe con exactitud dónde se colocó cada dispositivo, genera automáticamente contornos precisos y cuadros delimitadores, eliminando el etiquetado manual tedioso.
Prepararse para el mundo real con caos controlado
Una innovación clave de MicroSyn-X es la “aleatorización de dominio”, una inyección deliberada de variedad en las imágenes sintéticas. El sistema cambia automáticamente las formas de los órganos, las posiciones de los dispositivos, el brillo, el nivel de ruido e incluso cuánto quedan ocultos los dispositivos por huesos o herramientas. También crea muchas formas diferentes para los robots líquidos, que pueden estirarse, dividirse en enjambres y reunirse. Al exponer al algoritmo de aprendizaje a miles de situaciones ligeramente diferentes —muchas de las cuales son raras o difíciles de capturar en pacientes reales— los autores entrenan modelos que se centran en las señales visuales esenciales de los dispositivos en lugar de en patrones superficiales. Las pruebas muestran que los modelos entrenados exclusivamente con estas imágenes sintéticas pueden igualar o superar a los entrenados con rayos X reales, especialmente en casos difíciles con bajo contraste, mucho ruido u oclusión intensa.
De la pantalla del ordenador al robot en el quirófano
Los investigadores van más allá de las demostraciones de software y conectan MicroSyn-X directamente a un sistema robótico. Un brazo robótico sostiene un imán potente cerca del tejido mientras un arco en C de fluoroscopia captura imágenes de rayos X. El modelo de visión entrenado con MicroSyn-X detecta robots blandos con forma de stent y gotas líquidas en cada fotograma, y un algoritmo de seguimiento ensambla estas detecciones en trayectorias suaves, incluso cuando los dispositivos desaparecen brevemente detrás del hueso. Usando este realimentación, el robot guía los dispositivos a través de vasos artificiales tortuosos, órganos reales de animales fuera del cuerpo y arterias vivas en conejos y ratas. El sistema guía con éxito múltiples dispositivos a la vez, los sigue por vasos ramificados y supervisa enjambres de gotas líquidas que se dividen y se fusionan bajo control magnético —todo en tiempo real bajo condiciones de imagen desafiantes.
Hacia una atención más inteligente y menos invasiva
En términos sencillos, este trabajo muestra que los ordenadores pueden aprender a rastrear herramientas quirúrgicas diminutas de forma segura dentro del cuerpo practicando con vastas bibliotecas de rayos X “falsos” cuidadosamente elaborados en lugar de con los escasos reales. MicroSyn-X convierte la imagen sintética en un motor práctico para la robótica: crea datos de entrenamiento realistas, enseña a los modelos de visión y alimenta su salida a un sistema de navegación magnética que ya ha funcionado en animales vivos. A medida que estos métodos maduren y se prueben en casos más complejos, podrían ayudar a los cirujanos a realizar procedimientos delicados con mayor precisión y menos esfuerzo, acercándonos a un futuro en el que flotas de robots en miniatura mejoren silenciosamente el tratamiento desde dentro hacia afuera.
Cita: Wang, C., Kang, W., Sun, M. et al. Synthetic X‑ray‑driven tracking and control of miniature medical devices. Nat Mach Intell 8, 276–291 (2026). https://doi.org/10.1038/s42256-026-01190-3
Palabras clave: dispositivos médicos en miniatura, imágenes por rayos X, datos sintéticos, robótica médica, visión por computador