Clear Sky Science · es
La red de interacción anidada mejora la capacidad de respuesta en el comportamiento colectivo
Cómo las multitudes animales se mantienen tan sincronizadas
Los grupos grandes de animales a menudo parecen girar, esquivar o huir como si fuesen un solo organismo. Este artículo explora cómo la estructura oculta de “quién sigue a quién” dentro de un grupo de peces —y dentro de enjambres de robots inspirados en ellos— permite que toda la multitud reaccione con rapidez y fiabilidad cuando cambian las condiciones.
Capas de guía dentro de una multitud en movimiento
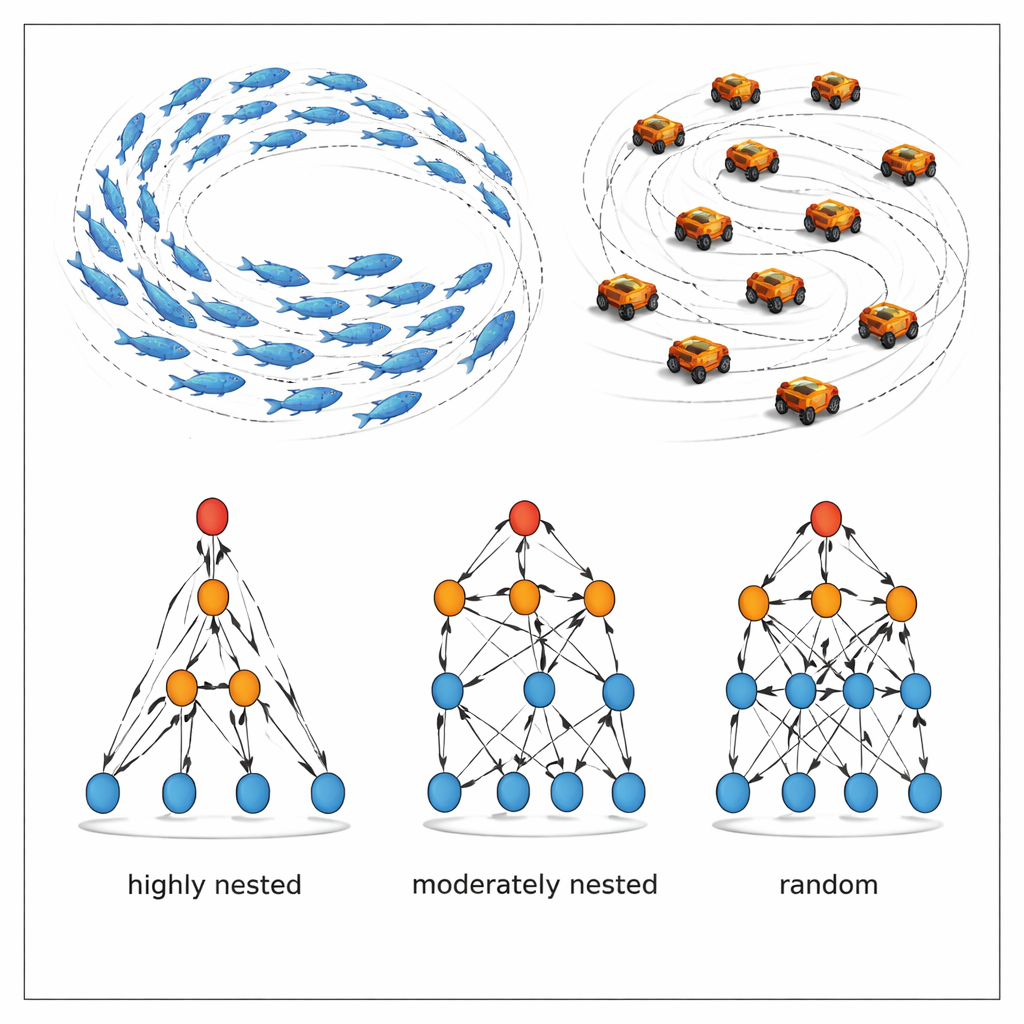
Cuando observamos a un cardumen de peces alejarse en espiral ante el peligro, es tentador pensar que cada pez simplemente copia a sus vecinos al mismo tiempo. Los autores muestran que la realidad es más sutil: existe un patrón invisible de guía en el que algunos peces influyen en muchos otros y otros principalmente siguen. Ese patrón no es un orden estricto, sino una red flexible de vínculos líder–seguidor que cambia según el tipo de movimiento que realiza el grupo. La característica estructural clave en la que se centran los investigadores se llama “anidamiento”: los líderes de nivel superior no sólo guían a sus seguidores inmediatos, sino que también guían indirectamente a muchos peces de niveles inferiores más abajo en la cadena.
Lo que los cardúmenes revelan sobre maniobras rápidas
El equipo filmó pequeños cardúmenes de rummy‑nose tetras nadando en un tanque circular poco profundo, rastreando la posición y la dirección de cada pez a lo largo del tiempo. A partir de esas trayectorias reconstruyeron quién tendía a moverse primero y quién solía reaccionar después, construyendo una red dirigida de influencia para cada grupo. También midieron cuán pronunciado era el giro del cardumen (curvatura) y cuán alineados estaban los peces (polarización). Encontraron que cuando el grupo ejecutaba maniobras rápidas y sinuosas con frecuentes cambios de dirección, la red subyacente era fuertemente anidada: unos pocos peces influían en muchos, y el patrón de influencia se parecía a una cascada triangular ordenada. En contraste, cuando el cardumen se deslizaba de forma estable en una sola dirección, la red era menos anidada y más igualitaria, aunque los peces seguían bien alineados.
Probando el flujo de información en redes idealizadas
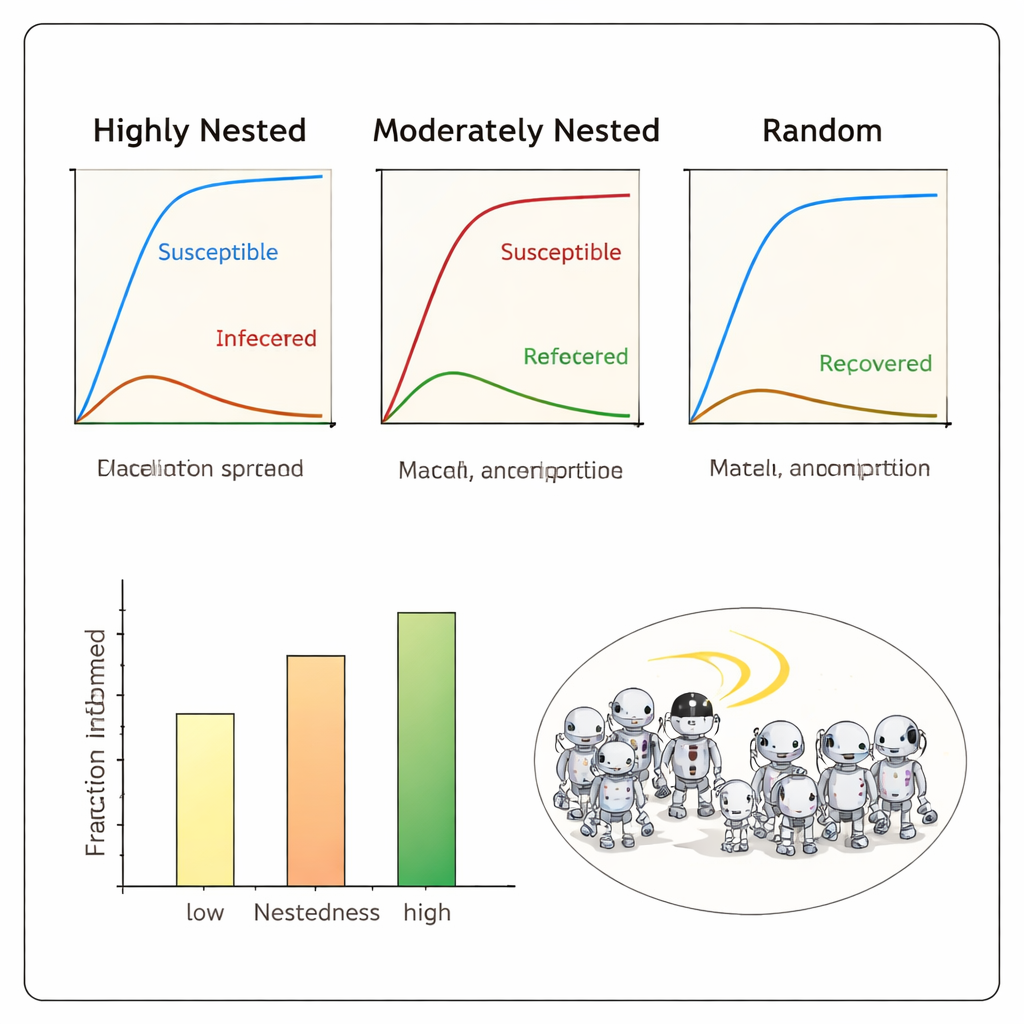
Para entender por qué las estructuras anidadas podrían ayudar, los autores recurrieron a un modelo simple de propagación usado a menudo para epidemias. Aquí, que un nodo se “infecte” significa que ha captado y está transmitiendo una señal direccional, no una enfermedad. Compararon redes líder–seguidor perfectamente anidadas con redes parcialmente anidadas y redes aleatorias, manteniendo el número total de conexiones igual. En el caso más anidado, una señal sembrada en la cima alcanzó rápidamente casi todos los nodos, y lo hizo incluso cuando los nodos se recuperaban (dejaban de transmitir) relativamente rápido. A medida que la red se aleatorizaba y disminuía el anidamiento, la señal se estancaba: muchos nodos permanecían desinformados, el número máximo de transmisores activos bajaba y el modelo necesitaba muchas más fuentes iniciales de señal para lograr la misma cobertura.
De las ecuaciones a multitudes robóticas que giran
El estudio preguntó luego si estas ventajas estructurales se traducen en movimiento real. Los autores construyeron un modelo de enjambre “autopropulsado” en el que cada individuo elige a quién seguir en función de lo llamativo que le parezca el movimiento de un vecino, pero con una variante: la regla favorece la construcción de una jerarquía anidada, donde los movimientos más “salientes” convierten a ciertos individuos en líderes de muchos otros. Compararon este esquema perfectamente anidado con dos alternativas comunes: una en la que cada vecino tiene el mismo peso y otra en la que las influencias se ponderan de forma continua según las señales de movimiento. En grupos simulados a los que se pidió realizar giros grandes y repetidos comandados por unos pocos individuos informados, el esquema anidado permitió que la multitud igualara el patrón de rumbo objetivo con mayor fidelidad y con demoras menores, incluso cuando se añadió ruido considerable al movimiento.
Robots reales actuando como peces en cardumen
Finalmente, los investigadores implementaron su control por red anidada en cincuenta pequeños robots con ruedas que se movían en una arena plana. En una tarea de “hovering”, un único robot informado trataba de mantener al grupo circulando en una región. Con una regla convencional de vecinos ponderados, la trayectoria del enjambre fue suave y lenta, mostrando solo curvas suaves. Con la regla anidada, los robots ejecutaron giros más pronunciados y decididos, siguiendo de cerca los cambios del robot informado. En una tarea de “seguimiento”, en la que un robot informado hacía cambios direccionales impredecibles, el enjambre controlado por la red anidada se mantuvo nuevamente más cerca tanto en posición como en rumbo, mientras que el enjambre de comparación suavizaba o perdía muchos de los giros.
Por qué esto importa más allá de peces y robots
En términos cotidianos, el trabajo muestra que cómo está cableada una multitud importa tanto como cuán sensibles son sus miembros. Una red de influencia fuertemente anidada —una cadena por capas donde líderes de niveles superiores alcanzan a muchos otros— permite que los grupos reaccionen más rápido y con mayor fiabilidad a señales importantes, sin dejarse abrumar por el ruido. Estas ideas podrían ayudar a los biólogos a interpretar los enjambres animales, guiar el diseño de equipos de drones o robots submarinos que deben responder con rapidez en entornos riesgosos e incluso orientar cómo organizamos redes humanas cuando se necesita acción coordinada y rápida.
Cita: Zheng, Z., Tao, Y., Xiang, Y. et al. Nested interaction network enhances responsiveness in collective behavior. Commun Phys 9, 75 (2026). https://doi.org/10.1038/s42005-026-02510-0
Palabras clave: comportamiento colectivo, cardumen de peces, robótica en enjambres, transferencia de información, jerarquía de red