Clear Sky Science · es
Sistema de filtrado de Kalman multinivel para fusión de sensores integrado con memtransistor de MoS2 con 1024 niveles de conductancia
Percepción más inteligente para coches autónomos más seguros
Los coches autónomos modernos dependen de un enjambre de sensores para entender la carretera, pero combinar toda esa información de forma rápida y eficiente es extraordinariamente difícil. Este estudio muestra cómo un nuevo tipo de dispositivo electrónico diminuto, llamado memtransistor, puede acelerar y simplificar ese proceso de fusión de sensores. Al trasladar cálculos clave desde chips digitales voluminosos a hardware analógico esbelto, los investigadores reducen drásticamente tanto el consumo de energía como la latencia, apuntando a sistemas autónomos más seguros y con mayor capacidad de respuesta que pueden lidiar con mal tiempo, visibilidad bloqueada y calles concurridas.
Por qué muchos ojos son mejores que uno
En las pistas de prueba y autopistas actuales, los vehículos autónomos observan el mundo mediante una mezcla de cámaras, medición por láser (LiDAR), radar de ondas milimétricas y sensores de movimiento que siguen cómo se mueve el coche. Cada uno de estos tiene sus propias fortalezas y debilidades: el LiDAR puede quedar bloqueado por camiones o edificios, el radar tiene dificultades con detalles finos, y los sensores de movimiento se desvían lentamente de la verdad si se usan solos. Para obtener una imagen fiable del tráfico circundante, el vehículo debe fusionar estas visiones imperfectas en una estimación coherente de dónde están las cosas y cómo se mueven. Una herramienta matemática llamada filtro de Kalman se ha convertido en un recurso para hacer esto en tiempo real, pero en su forma convencional funciona en procesadores digitales que consumen energía e introducen retrasos al mover repetidamente datos entre sensores analógicos y lógica digital.

Un nuevo tipo de bloque electrónico
El equipo aborda este problema usando un dispositivo construido a partir de una sola capa atómica del semiconductor disulfuro de molibdeno (MoS2). Su memtransistor combina los roles de elemento de memoria y transistor en una estructura de tres terminales, cuya conductancia eléctrica puede ajustarse de forma continua y luego conservarse incluso cuando se corta la alimentación. Al controlar cuidadosamente pequeñas vacancias en la red atómica del material con campos eléctricos, el dispositivo puede almacenar de forma fiable 1024 niveles de conductancia distintos a lo largo de un amplio rango, y mantenerlos durante más de un año. Igualmente importante, estos niveles cambian de forma casi lineal al barrer la tensión de control, lo que permite mapear un peso matemático deseado en el filtro de Kalman directamente sobre una configuración física del memtransistor.
Convertir las matemáticas en hardware
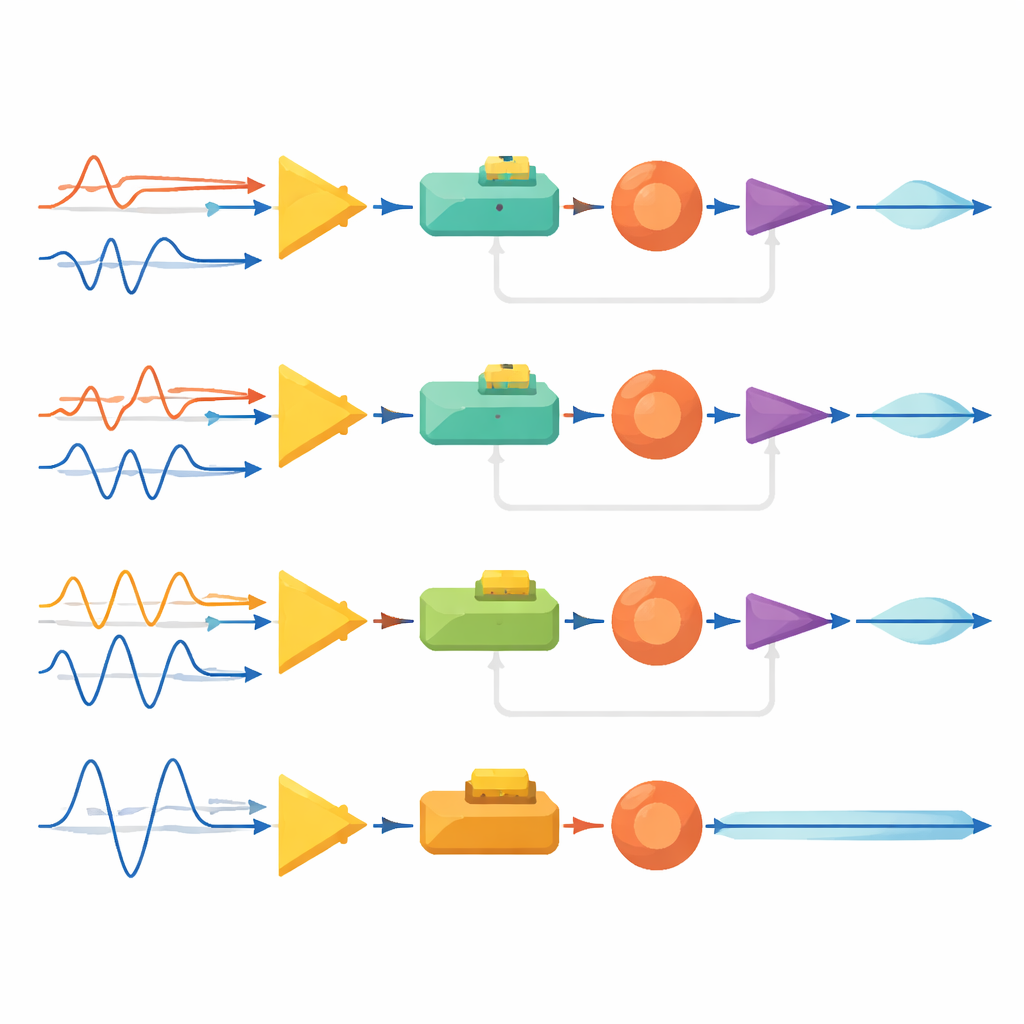
Partiendo de este dispositivo, los investigadores diseñan una versión analógica de un filtro de Kalman multinivel que opera directamente sobre tensiones de los sensores en lugar de números digitales. El circuito consiste en tres etapas encadenadas que estiman la posición, la velocidad y la aceleración del vehículo. Dentro de cada etapa, operaciones básicas como resta, integración, suma y diferenciación se llevan a cabo mediante módulos analógicos compactos. El factor de “ganancia” crucial que indica al filtro cuánto confiar en las nuevas lecturas de los sensores frente a sus propias predicciones se implementa usando la conductancia del memtransistor. Ajustando simplemente una tensión de puerta, el sistema puede cambiar de forma continua cuánto escucha al LiDAR, al radar o a los sensores de movimiento, sin reescribir ningún software.
Escenarios de conducción y condiciones difíciles
Para mostrar cómo funciona en la práctica, el equipo implementa el filtro completo de tres etapas en una placa de circuito poblada con sus dispositivos de MoS2 y componentes analógicos estándar. Alimentan señales realistas y ruidosas que imitan lo que verían el LiDAR, el radar y los sensores de movimiento durante una maniobra de adelantamiento con cambio de carril en autopista. Conforme las señales fluyen por cada etapa, las salidas se vuelven más limpias, proporcionando estimaciones coherentes de posición, velocidad y aceleración mientras se preservan cambios bruscos que importan para la seguridad, como un frenado repentino. El sistema es especialmente notable cuando un sensor se vuelve poco fiable o queda bloqueado —por ejemplo, cuando un camión oculta temporalmente otro vehículo al LiDAR—. Al reducir la ganancia asociada con el sensor comprometido en hardware, el filtro analógico desplaza automáticamente su confianza hacia las entradas restantes y hacia patrones de movimiento previos, manteniendo las estimaciones de velocidad y aceleración suaves y físicamente razonables.
Cerebros más rápidos y ligeros para máquinas
En comparación con una implementación digital estándar de la misma tarea de filtrado, el sistema analógico basado en memtransistores utiliza aproximadamente 13 veces menos energía y completa sus cálculos alrededor de 59 veces más rápido, mientras gestiona tres variables de movimiento clave a la vez. Dado que los dispositivos son compactos, estables y compatibles con fabricación a gran escala, este enfoque apunta a futuros bloques de procesamiento “en el sensor” o “cerca del sensor” que puedan ubicarse cerca de cámaras y radares dentro de coches, drones y otras máquinas conectadas. Para el público no especializado, la conclusión es que al permitir que la física de materiales avanzados resuelva parte de las matemáticas, los ingenieros pueden construir “cerebros” electrónicos más inteligentes, rápidos y eficientes que ayudan a los sistemas autónomos a navegar de forma fiable incluso cuando la visión del mundo está lejos de ser perfecta.
Cita: Tan, T., Guo, H., Wang, S. et al. Multi-stage Kalman filtering system for sensor fusion integrated with MoS2 memtransistor featuring 1024 conductance levels. npj 2D Mater Appl 10, 31 (2026). https://doi.org/10.1038/s41699-026-00672-7
Palabras clave: conducción autónoma, fusión de sensores, filtro de Kalman, memtransistor, computación analógica