Clear Sky Science · es
Tubería TinyML para clasificación eficiente de fisuras en inspecciones de salud estructural con UAV
Ojos más inteligentes en el cielo
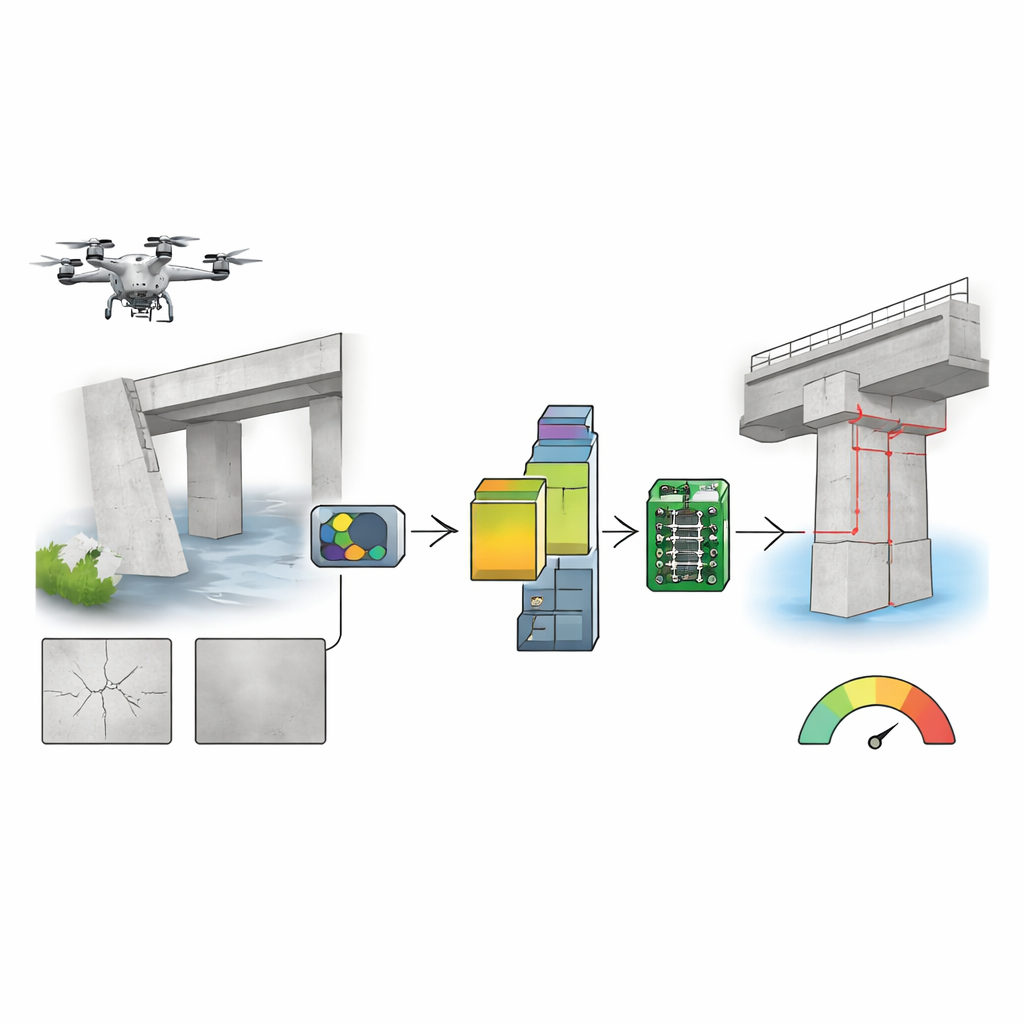
Puentes, presas y otras estructuras críticas envejecen como lo hacen las personas, y las pequeñas fisuras pueden ser señales tempranas de futuros fallos. Los ingenieros envían cada vez más drones pequeños para fotografiar estas superficies, pero hoy muchas de esas imágenes deben enviarse a servidores remotos para su análisis, consumiendo batería y poniendo en riesgo la privacidad de los datos. Este artículo explora cómo reducir el "cerebro" detector de grietas a un chip diminuto de escala miliwatio que puede montarse en el propio dron, haciendo las inspecciones más rápidas, seguras y mucho más eficientes.
Por qué importan las grietas
Los métodos tradicionales para vigilar la salud de las estructuras suelen depender de sensores de contacto atornillados o pegados al hormigón y al acero. Estos sistemas pueden ser caros de instalar y tienden a detectar problemas solo después de que el daño ha progresado. La inspección visual ofrece una visión más directa, pero enviar inspectores humanos a andamios o a carriles de tráfico es lento, arriesgado y subjetivo. Pequeños vehículos aéreos no tripulados (UAV) equipados con cámaras prometen una mejor solución: pueden barrer rápidamente tableros de puentes y paredes, capturando miles de fotos detalladas que revelan fracturas capilares. El reto es qué hacer con todos esos datos cuando el dron solo tiene vida de batería limitada y conexiones de red a menudo poco fiables.
El problema de enviar todo a la nube
La mayoría de los sistemas actuales siguen un patrón de "adquisición en el borde—inferencia en la nube". El dron actúa simplemente como una cámara voladora, retransmitiendo imágenes a un ordenador potente en otro lugar que ejecuta un modelo de aprendizaje profundo para decidir si cada parche de hormigón contiene una grieta. Este enfoque tiene sentido desde el punto de vista informático, pero conlleva importantes inconvenientes. El streaming de imágenes de alta calidad agota la batería del dron, reduciendo drásticamente el tiempo de vuelo. Si el enlace inalámbrico se cae o se debilita, la misión de inspección puede estancarse en el peor momento. Y enviar imágenes detalladas de infraestructuras estratégicas a servidores remotos plantea preocupaciones comprensibles de privacidad y seguridad. Estas tensiones motivan un enfoque diferente: poner la inteligencia directamente en el dron, en hardware apenas más potente que un reloj digital.
Reducir el cerebro para que quepa en un chip diminuto
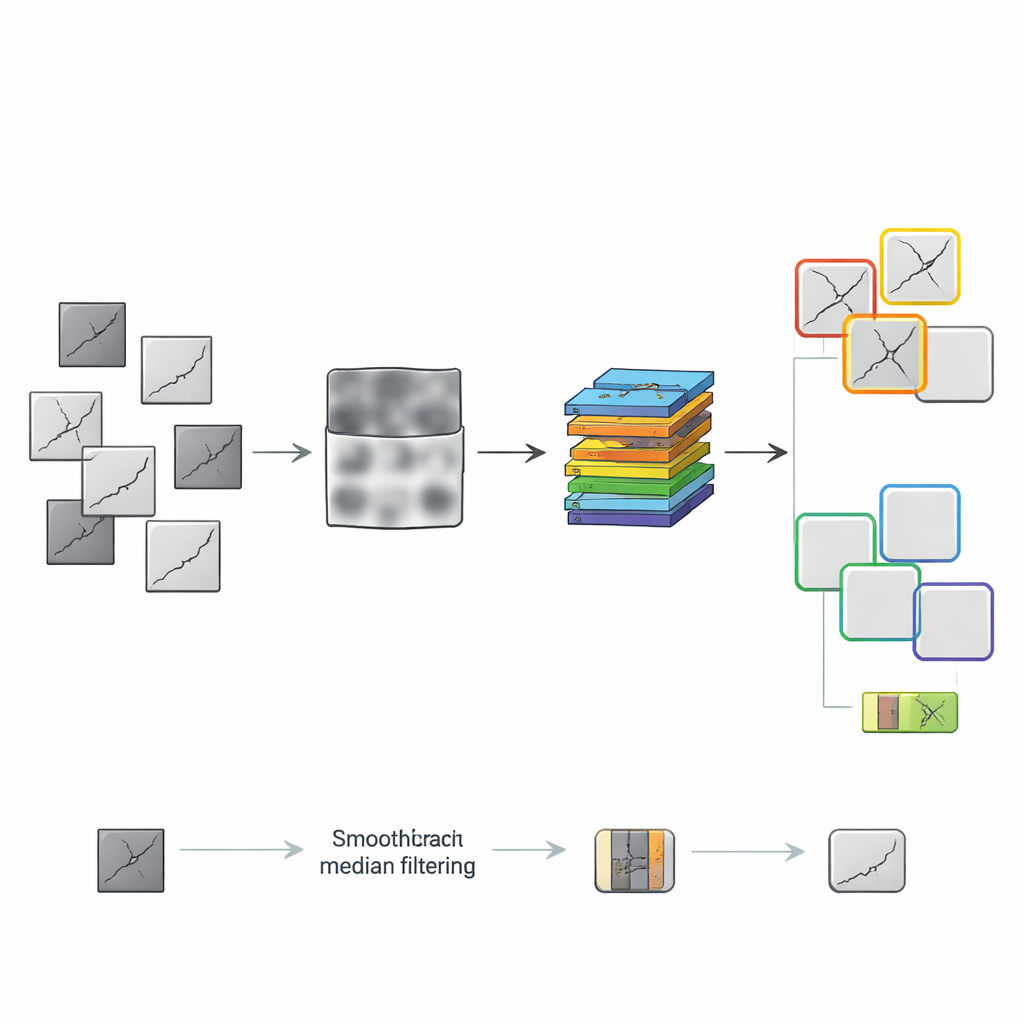
Los autores construyeron una tubería de extremo a extremo que se ejecuta en un microcontrolador de bajo consumo, el STM32H7, empleando una red neuronal compacta llamada MobileNetV1x0.25. En lugar de inventar un nuevo modelo, se centraron en todo lo que lo rodea: cómo se preprocesan las imágenes y cómo se comprime el modelo. Utilizaron un conjunto de datos ampliamente estudiado de más de 50.000 imágenes de hormigón, divididas en pequeños parches etiquetados como "grieta" o "sin grieta", y luego entrenaron y probaron distintas formas de preparar estos parches para el modelo diminuto. Una vía siguió una secuencia artesanal de pasos, como convertir a escala de grises, aumentar el contraste, eliminar ruido, suavizar y, finalmente, convertir las imágenes en siluetas en blanco y negro. Otra vía permitió que una estrategia de búsqueda "codiciosa" construyera una cadena de preprocesado paso a paso, manteniendo siempre la combinación que realmente mejoraba el rendimiento del modelo.
Encontrar el equilibrio óptimo en la tubería
Las pruebas revelaron que más procesamiento no siempre es mejor. La tubería manual, que terminaba con una binarización extrema, en realidad dañaba a la red neuronal, eliminando matices de sombreado que el modelo necesitaba para ver fisuras finas. En contraste, la búsqueda codiciosa descubrió que un par de pasos más sencillo—conversión a escala de grises seguida de filtrado mediano para suavizar el ruido suavemente—daba los mejores resultados. Además, el equipo exploró sistemáticamente cuatro formas de exprimir el modelo: convertir sus valores de precisión completa a enteros de ocho bits, entrenarlo mientras "simulaba" estar cuantizado, recortar pesos menos importantes y agrupar valores de pesos similares. Probaron estas técnicas por separado y en combinaciones, luego desplegaron los modelos resultantes en la placa del microcontrolador y midieron no solo la precisión, sino el uso de memoria, el tiempo de procesamiento y la energía por decisión.
Ordenador diminuto, gran rendimiento
Surgió una configuración como la mejor opción global: una entrada en escala de grises más filtrado mediano alimentando un modelo que combina poda con entrenamiento consciente de la cuantización en formato de ocho bits. Esta configuración compacta logró una puntuación F1—un equilibrio entre detectar grietas reales y evitar falsas alarmas—de 0,938, un salto de más de 11 puntos porcentuales respecto a detectores de grietas previos en dispositivo. Al mismo tiempo, necesitó solo unos 2,9 megabytes de memoria de trabajo, 309 kilobytes de almacenamiento de programa y menos de medio segundo para procesar cada parche de imagen. Cada decisión consumió aproximadamente 0,6 julios de energía. Montado en un dron DJI Mini 4 Pro, ejecutar continuamente este clasificador de grietas reduciría el tiempo de vuelo en solo alrededor del 4 por ciento, comparado con aproximadamente una cuarta parte de la batería que consumen las populares placas de computación en el borde, mucho más pesadas.
Qué significa esto para las inspecciones en el mundo real
Para los no especialistas, el mensaje clave es que las evaluaciones estructurales serias ya no requieren enviar imágenes sensibles a centros de datos lejanos ni llevar ordenadores voluminosos y consumidores de energía al cielo. Afinando con cuidado cómo se limpian las imágenes y cómo se comprime la red neuronal, los autores demuestran que un chip del tamaño de un pulgar puede detectar fiablemente grietas en hormigón sin apenas mermar la batería del dron. El sistema se mantiene razonablemente robusto frente al desenfoque por movimiento y a cambios de iluminación, y se comporta de forma sensata incluso cuando las imágenes con grietas son raras entre muchos parches sanos. En conjunto, estos resultados acercan las inspecciones con drones a un futuro en el que enjambres de pequeños UAV económicos puedan vigilar silenciosamente nuestra infraestructura, detectando problemas temprano con inteligencia a bordo inteligente y eficiente.
Cita: Zhang, Y., Nürnberg, A., Rau, L.S.M. et al. TinyML pipeline for efficient crack classification in UAV-based structural health inspections. Sci Rep 16, 8964 (2026). https://doi.org/10.1038/s41598-026-43534-4
Palabras clave: inspección con dron, grietas en hormigón, tiny machine learning, monitorización de la salud estructural, IA en el borde