Clear Sky Science · es
Control independiente del hardware para la simulación de gravedad parcial usando un dispositivo robótico de 2 GDL
Por qué importa una gravedad más ligera en la Tierra
A medida que los humanos planifican viajes más largos a la Luna y a Marte, necesitamos con urgencia saber cómo niveles inusuales de gravedad afectarán al cuerpo. Realizar tales pruebas en el espacio es caro y poco frecuente, por lo que los científicos usan máquinas giratorias especiales en la Tierra, llamadas clinostatos, para imitar la baja gravedad en células y pequeños tejidos. Este artículo presenta una nueva forma de controlar ese dispositivo para que pueda imitar de manera fiable no solo la ingravidez, sino también las atracciones más débiles de la Luna, Marte e incluso niveles de gravedad cercanos a la terrestre, sin depender estrictamente de un motor o componente de hardware concreto.
Girando para crear gravedad falsa
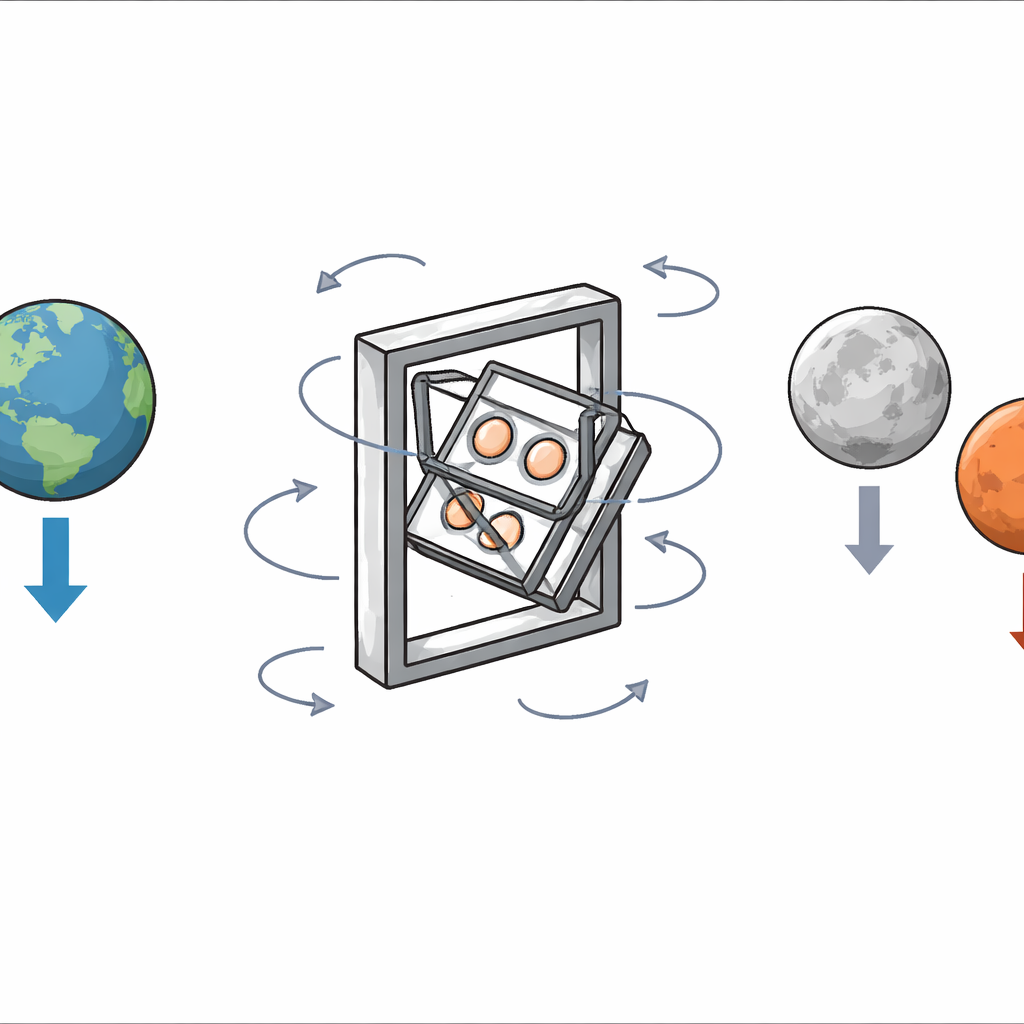
Cerca de la superficie terrestre, la gravedad apunta casi siempre hacia abajo. Un clinostato tridimensional toma una pequeña muestra —por ejemplo, células u organoides en una placa— y la hace girar lentamente alrededor de dos ejes perpendiculares. Como la orientación de la muestra cambia continuamente, la dirección de la gravedad “vist a” por las células va variando, y con el tiempo esas fuerzas se promedian. Cuando las rotaciones se organizan adecuadamente, la gravedad promediada en el tiempo puede acercarse a cero, imitando la microgravedad en órbita. Durante muchos años esta idea simple se ha usado para estudiar la pérdida muscular, el debilitamiento óseo, cambios en el sistema inmune y otros efectos parecidos a los del espacio sin salir del suelo.
De la ingravidez a una gravedad “tipo Luna”
Más recientemente, los investigadores comprendieron que no basta estudiar solo la ingravidez. Los astronautas en la Luna o Marte vivirán con una gravedad más débil, no ausente. Para cubrir ese hueco se introdujo el concepto de gravedad parcial simulada promediada en el tiempo: en lugar de hacer que la atracción media desaparezca, el dispositivo mantiene la gravedad apuntando con mayor frecuencia en una dirección que en las otras. Ese sesgo crea una atracción media entre cero y la gravedad terrestre completa, permitiendo a los científicos imitar condiciones como 0,17 g en la Luna o 0,38 g en Marte. Los métodos de control anteriores podían lograr esto, pero dependían mucho de los motores y la mecánica exactos y no podían producir gravedad parcial mayor de aproximadamente 0,44 g.
Nueva forma de gobernar el girador
La innovación central de este estudio es controlar el motor exterior del clinostato en función de su ángulo, en lugar de hacerlo en función del tiempo. Los métodos previos prescribían la velocidad de rotación en cada instante, pero el hardware real nunca sigue ese plan a la perfección: pequeños retrasos y límites del motor provocan desviaciones angulares, y esos errores se acumulan, obligando a los investigadores a añadir bucles de retroalimentación adicionales sintonizados para cada dispositivo. Aquí, los autores rediseñan la regla de control de modo que la velocidad angular se dé directamente como función del ángulo actual. Ese cambio aparentemente pequeño reduce en gran medida el crecimiento del error y hace que el método sea en gran medida independiente de la potencia del motor y de la inercia. Al mismo tiempo, el motor interior se conduce con un patrón aleatorio‑parecido para que la gravedad no siga la misma trayectoria repetidamente, mejorando la fiabilidad experimental.
Acercando la gravedad a la de la Tierra
Mediante simulaciones por computador, el equipo mapeó cómo un parámetro de control clave, llamado α, afecta la gravedad media final. Aumentando α pudieron elevar la gravedad parcial simulada hasta aproximadamente 0,68 g —ya mucho más alto que el antiguo límite de 0,44 g. Para llegar más lejos introdujeron un truco de “tiempo de reposo”: cada vez que el armazón exterior alcanza el ángulo donde la gravedad se alinea con la atracción media deseada, el motor se detiene brevemente. Durante esta pausa la muestra siente un tirón constante en esa dirección, reforzando el sesgo. Las simulaciones mostraron que pausas más largas llevan la gravedad efectiva más cerca del 1 g terrestre, y los experimentos confirmaron valores de hasta aproximadamente 0,81 g con una diferencia de solo alrededor del 1% respecto a los resultados predichos en el rango de mayor precisión.
Probando Luna, Marte y más allá
Los investigadores construyeron un clinostato de dos ejes accionado por servomotores comerciales y monitorizaron la dirección de la gravedad usando un sensor inercial montado en el centro. Probaron una gama de valores de α y tiempos de reposo, midiendo cuán rápido se estabilizaba la gravedad media y cuánto se ajustaban los experimentos a las simulaciones. Para valores moderados de α que corresponden a 0,33–0,63 g, la discrepancia fue típicamente del orden del 1% o menos. Las simulaciones y experimentos para condiciones tipo Luna y Marte produjeron atracciones medias próximas a 0,17 g y 0,38 g, manteniendo al mismo tiempo trayectorias de gravedad variadas de un ensayo a otro. Los autores también exploraron los límites prácticos impuestos por la resolución del motor y los retrasos de respuesta, y ofrecen pautas sencillas para elegir actuadores y márgenes de seguridad para que otros laboratorios puedan reproducir niveles precisos de gravedad parcial.
Qué significa esto para la salud espacial futura
En términos sencillos, este trabajo convierte un montaje giratorio complejo y sensible al hardware en un simulador de gravedad parcial más plug‑and‑play. Al ligar la velocidad del motor al ángulo y añadir pausas controladas, el método puede imitar fielmente una amplia gama de niveles de gravedad, desde el espacio profundo hasta Luna y Marte y hasta acercarse a la Tierra, sin necesidad de un ajuste constante de bucles de control. Esa flexibilidad facilita que muchos grupos de investigación estudien cómo responden las células, tejidos y organoides a niveles específicos de gravedad, ayudando a predecir riesgos para la salud y diseñar contramedidas para misiones espaciales de larga duración.
Cita: Kim, Y.J., Park, S. & Kim, S. Hardware-independent control for partial gravity simulation using a 2-DOF robotic device. Sci Rep 16, 9727 (2026). https://doi.org/10.1038/s41598-026-40665-6
Palabras clave: simulación de gravedad parcial, clinostato, biología espacial, investigación en microgravedad, control de movimiento robótico