Clear Sky Science · es
Estimación cuantitativa del kernel de desenfoque a partir de señales de tráfico utilizando la respuesta en frecuencia espacial de borde inclinado como métrica de nitidez
Por qué importan las cámaras borrosas en los coches
Los coches modernos dependen cada vez más de cámaras para detectar peatones, leer señales de tráfico y mantener el vehículo en su carril. Pero, al igual que la vista humana, la visión de las cámaras puede empeorar con el tiempo debido a la edad, el calor, las vibraciones o pequeños desplazamientos durante el montaje. Este artículo explora una nueva forma de "medir" cuánto se ha desenfocado una cámara automotriz examinando señales de tráfico corrientes, lo que potencialmente permite a los fabricantes monitorizar la salud de las cámaras a lo largo del tiempo en lugar de esperar a que fallen.
Convertir las señales de tráfico en cartas de prueba
En las fábricas, la nitidez de la cámara se comprueba con patrones de prueba especiales antes de enviar la unidad. En carretera, sin embargo, no existe un objetivo controlado: sólo el mundo real. Los autores aprovechan un objeto común y repetible en ese mundo: las señales de tráfico con bordes limpios y de alto contraste. Se centran en una medida estándar de nitidez denominada respuesta en frecuencia espacial (SFR), que esencialmente indica qué tan bien una cámara preserva el detalle fino en una imagen. Analizando bordes ligeramente inclinados ("slanted") en las señales de tráfico, pueden calcular la SFR de manera similar a las pruebas de laboratorio, pero directamente a partir de escenas reales de conducción.

Capturar cómo una lente dispersa la luz
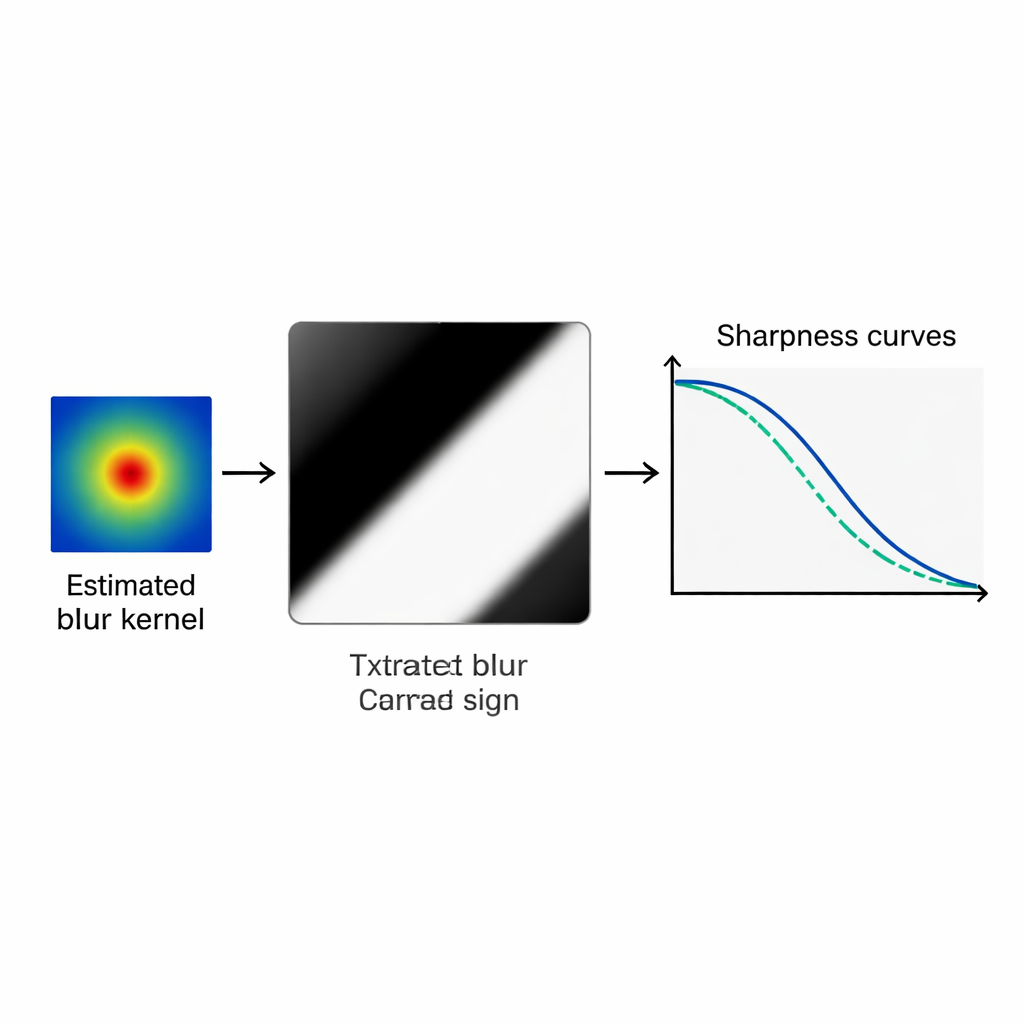
El desenfoque en una cámara puede describirse por una pequeña imagen llamada kernel de desenfoque, o función de dispersión puntual. Muestra cómo la luz de un único punto de la escena se distribuye sobre píxeles vecinos en el sensor. Estimar este kernel directamente a partir de una fotografía borrosa es normalmente muy difícil, porque muchas combinaciones posibles de imagen nítida y patrón de desenfoque pueden producir un resultado similar. Para abordar esto, los investigadores primero usan software de diseño óptico para simular unos 1.300 kernels de desenfoque realistas para una cámara automotriz específica, abarcando distintas posiciones de enfoque y ubicaciones en la imagen. Luego comprimen esta gran colección en un conjunto compacto de patrones clave usando una herramienta estadística llamada análisis de componentes principales (PCA), de modo que cualquier desenfoque realista pueda describirse con sólo unas pocas docenas de números en lugar de cientos de valores de píxel.
Comparar curvas de nitidez en lugar de píxeles
Una vez construido el "diccionario" compacto de desenfoques, el proceso de estimación real comienza con dos pequeños parches, cada uno de 45 × 45 píxeles, recortados de una imagen borrosa de una señal de tráfico, junto con parches coincidentes de una imagen de referencia nítida de la misma señal. Para un kernel de desenfoque candidato extraído del modelo PCA, los parches nítidos se desenfocan artificialmente y se calculan sus curvas SFR. Estas curvas se comparan luego con las curvas SFR medidas a partir de los parches borrosos reales. Un método de optimización global conocido como evolución diferencial ajusta los parámetros del kernel para minimizar la diferencia entre los dos conjuntos de curvas. En efecto, el algoritmo busca el patrón de desenfoque que haga que las curvas de nitidez sintéticas se alineen lo más posible con las medidas obtenidas de la imagen real de la cámara.
¿Qué tan bien funciona el método?
Los autores prueban primero su método con datos sintéticos, donde conocen exactamente los kernels de desenfoque verdaderos. A lo largo de diez niveles de desenfoque diferentes, desde muy nítido hasta visiblemente desenfocado, los kernels estimados coinciden estrechamente con la verdad de referencia según varias medidas de similitud independientes, con valores de similitud estructural típicamente por encima de 0,95 y errores medios muy bajos. También comparan su enfoque con técnicas recientes de "desenfoque ciego" de última generación en visión por computador, que están diseñadas principalmente para mejorar la apariencia de las imágenes más que para recuperar la forma exacta del desenfoque. En la tarea de reconstruir con precisión el kernel subyacente para esta cámara específica, el nuevo método basado en PCA supera claramente a estos métodos de referencia. Finalmente, aplican el algoritmo a imágenes reales de una cámara automotriz modificada cuyo sensor puede desplazarse en pequeños pasos para inducir desenfoque conocido. Aunque aquí no están disponibles los kernels verdaderos, los kernels estimados generan bordes sintéticos cuyas curvas de nitidez y apariencia visual permanecen muy próximas a los bordes borrosos reales en una amplia gama de ajustes de enfoque.
De la técnica de laboratorio al chequeo de salud de la cámara
Para no especialistas, el resultado principal es que los autores ahora pueden convertir señales de tráfico ordinarias en una herramienta diagnóstica que revela cómo cambian las ópticas de una cámara de coche con el tiempo, y no sólo si una imagen parece nítida o borrosa. En lugar de un único número de aprobado/reprobado, el kernel de desenfoque estimado codifica información detallada sobre cómo se dispersa la luz dentro de la lente, que a su vez puede relacionarse con desenfoque por falta de enfoque o con imperfecciones ópticas específicas. Aunque el método actual requiere mucho cálculo y funciona sólo en pequeños parches alrededor de bordes claros, apunta hacia sistemas futuros en los que ocasionalmente se envíen imágenes desde los vehículos a un servidor que rastree la degradación lenta de la nitidez de la cámara. Esto podría informar mantenimiento preventivo, apoyar sistemas avanzados de asistencia a la conducción más seguros y, en última instancia, ayudar a garantizar que los "ojos" digitales de los vehículos autónomos se mantengan en buen estado durante años de servicio.
Cita: Pandey, A., Akhtar, M.Z., Veettil, N.K. et al. Quantitative Kernel estimation from traffic signs using slanted edge spatial frequency response as a sharpness metric. Sci Rep 16, 7387 (2026). https://doi.org/10.1038/s41598-026-40556-w
Palabras clave: cámaras automotrices, nitidez de imagen, kernel de desenfoque, imágenes de señales de tráfico, monitorización de salud de la cámara