Clear Sky Science · es
Mapeo semántico consciente de objetos usando funciones de densidad de probabilidad para relocalización y planificación de rutas en interiores
Por qué importan mapas interiores más inteligentes
A medida que los robots domésticos y de servicio pasan de los laboratorios a apartamentos reales, deben hacer más que evitar paredes y muebles. Para ser realmente útiles, los robots deberían entender que una cama suele indicar un dormitorio, o que un frigorífico sugiere una cocina. Este artículo presenta una nueva forma para que los robots “vean” los espacios interiores a través de los objetos que definen cada estancia, lo que les permite averiguar dónde están y elegir rutas que encajen mejor con la forma en que las personas usan sus hogares.
Ver las habitaciones a través de sus objetos cotidianos
Los mapas tradicionales para robots se centran bien en la geometría bruta o bien en símbolos abstractos. Los mapas de rejilla construidos a partir de escaneos láser capturan formas detalladas, pero se vuelven pesados de almacenar y lentos de buscar, y pueden empujar a los robots hacia trayectorias rígidas en forma de cuadrícula. Los grafos de alto nivel de habitaciones y puertas son más manejables, pero descartan el detalle fino necesario para una conducción precisa. Los autores salvan esta brecha organizando los mapas alrededor de las habitaciones y los objetos estáticos clave en su interior: camas, sofás, frigoríficos, mesas y similares. Cada habitación se delimita en un plano horizontal, y cada clase de objeto importante obtiene su propia capa, de modo que distintos tipos de mobiliario no se sobreescriben entre sí.
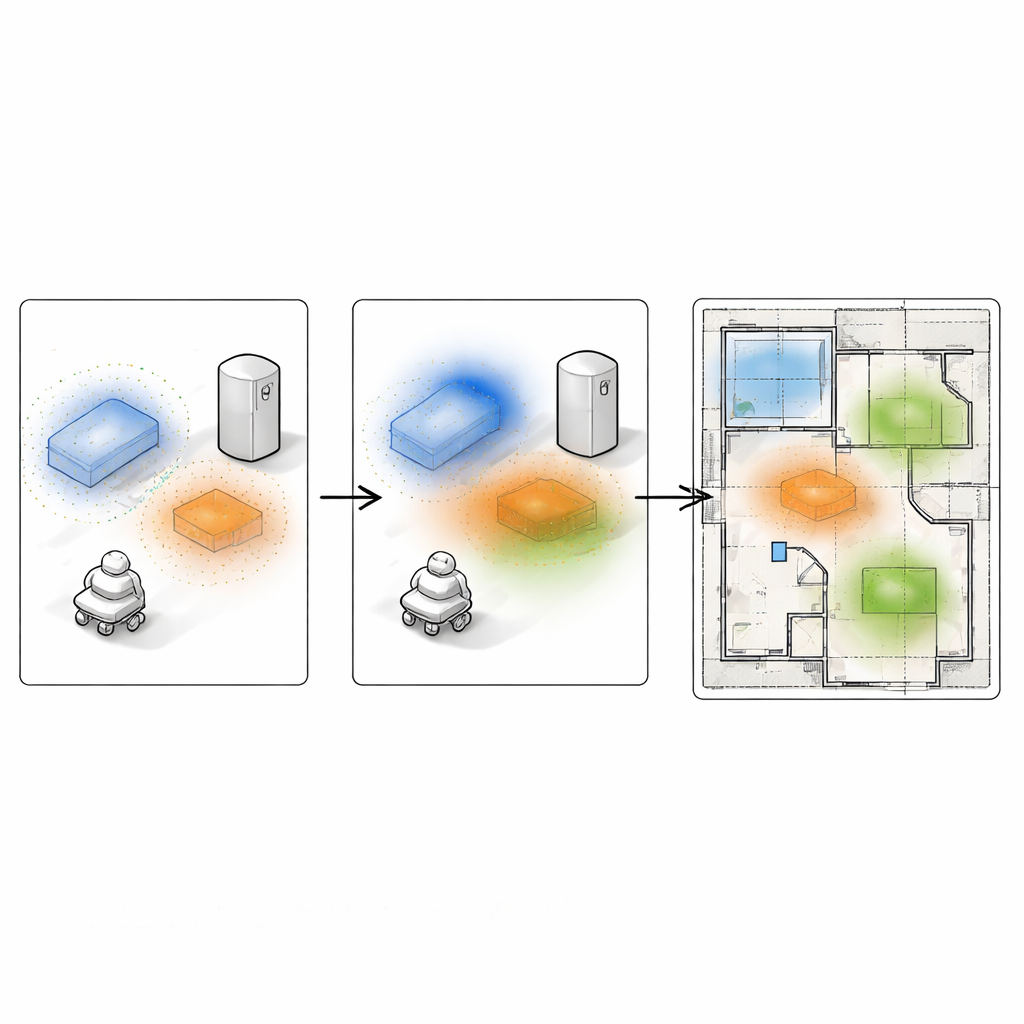
Convertir el mobiliario en nubes de probabilidad suaves
En lugar de dibujar cada objeto como una caja de bordes duros, el método convierte escaneos 3D del mobiliario en “mapas de calor” suaves sobre el suelo. El robot primero reconstruye cada habitación en 3D usando una cámara RGB‑D y herramientas estándar, y después etiqueta semánticamente los puntos que pertenecen a objetos como paredes, camas o sillas. Para cada tipo de objeto en una habitación, se detectan conglomerados de puntos que se proyectan sobre el suelo. A partir de estos conglomerados, el sistema estima una densidad de probabilidad continua: una mancha suave que es máxima donde el objeto probablemente está y se atenúa hacia el exterior. Apilar estas manchas por tipo de objeto produce un mapa compacto por capas que conserva tanto el significado de los objetos como su forma aproximada, manejando de forma natural el ruido y las vistas parciales.
Permitir que los robots redescubran dónde están
Un uso principal de este mapa centrado en objetos es ayudar al robot a relocalizarse cuando no tiene idea de su posición en el plano del edificio, un problema común cuando el robot se activa por primera vez o ha sido movido. El robot realiza una nueva observación con su cámara de profundidad, detecta los objetos en vista y construye su propio conjunto pequeño de manchas de probabilidad para esa escena parcial. A continuación, un algoritmo de búsqueda evolutiva explora muchas posibles poses del robot sobre el mapa del edificio. Para cada pose candidata, las manchas locales se superponen al mapa global y su similitud se mide mediante una distancia estadística. Las fronteras de las habitaciones y las comprobaciones de línea de visión descartan poses imposibles, como ver un frigorífico a través de una pared. A lo largo de muchas generaciones, la población de poses candidatas evoluciona hacia la ubicación donde los objetos observados coinciden mejor con los campos de probabilidad almacenados, proporcionando una estimación robusta de la posición y orientación del robot.
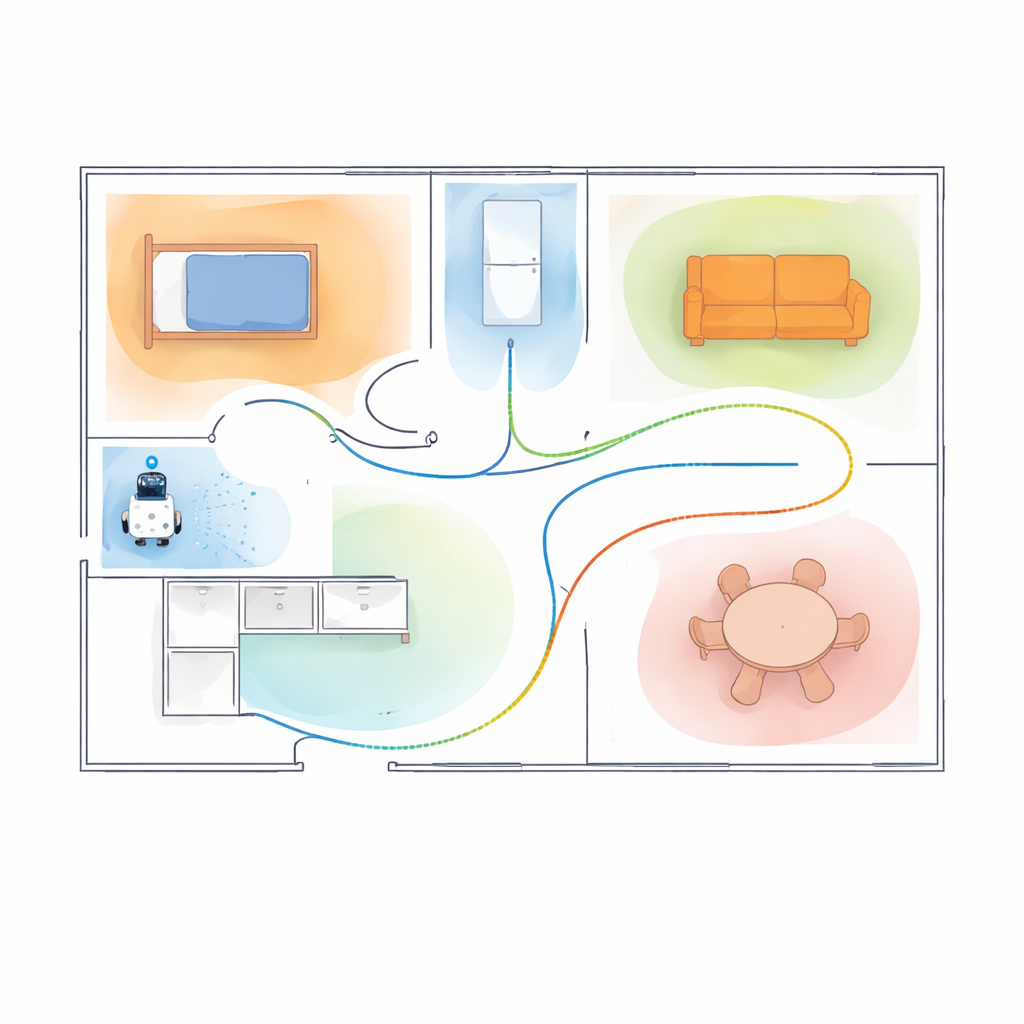
Planificar rutas que respeten cómo la gente usa el espacio
El mismo mapa también guía el movimiento del robot. Debido a que cada tipo de objeto se representa como un campo de influencia suave, se puede indicar al robot que favorezca o evite ciertas zonas ajustando pesos numéricos. Las camas pueden convertirse en regiones a evitar por la noche, mientras que las mesas pueden actuar como atractores al buscar objetos. Estas preferencias semánticas se combinan con un mapa de obstáculos estándar y un margen de seguridad alrededor de las paredes para formar un único paisaje de costes sobre el plano. Un planificador de rutas clásico encuentra entonces trayectorias que no solo evitan colisiones, sino que también siguen los sesgos sociales o relacionados con la tarea. Experimentos en un conjunto de datos realista y en un apartamento amueblado real muestran que estas rutas con sesgo semántico siguen mejor las preferencias deseadas, a veces a costa de pequeños aumentos en la longitud de la ruta, y pueden resultar más suaves en hogares reales.
Qué supone esto para los robots cotidianos
En términos simples, este trabajo enseña a los robots a pensar en los hogares como lo hacen las personas: como habitaciones definidas por sus muebles, no solo como cajas vacías con paredes. Al envolver cada objeto clave en una nube de probabilidad suave, un único mapa compacto puede soportar tanto “¿Dónde estoy?” como “¿Cómo debo llegar allí?” sin necesitar modelos separados específicos para cada tarea. Las pruebas muestran que este enfoque ayuda a los robots a localizarse de forma más fiable en habitaciones desordenadas o similares entre sí y a elegir rutas que encajen mejor con las expectativas humanas. A medida que estas ideas maduren, los futuros robots domésticos podrían navegar con más cortesía e inteligencia, moviéndose por nuestros espacios con una conciencia que resulta mucho menos mecánica.
Cita: Mora, A., Mendez, A., Moreno, L. et al. Object-aware semantic mapping using probability density functions for indoor relocalization and path planning. Sci Rep 16, 9450 (2026). https://doi.org/10.1038/s41598-026-40498-3
Palabras clave: localización de robots en interiores, mapeo semántico, navegación con conciencia de objetos, mapas robóticos probabilísticos, planificación de rutas