Clear Sky Science · es
Travesabilidad probabilística profunda con adaptación en tiempo de prueba para la navegación de rovers planetarios consciente de la incertidumbre
Por qué importa conducir rovers con más seguridad
Cuando enviamos robots con ruedas a la Luna o a Marte, deben desplazarse por arenas, rocas y pendientes sin ayuda humana. Un único error de cálculo sobre la suavidad del suelo puede dejar a un rover de miles de millones de dólares atascado para siempre, como sucedió cuando el rover Opportunity de la NASA quedó atrapado en arena ondulada durante semanas. Este estudio presenta una nueva forma para que los rovers "sientan" qué riesgo representa el terreno por delante, tomen decisiones de ruta más seguras e incluso aprendan de sus errores mientras conducen.
El suelo blando como peligro oculto
En otros mundos, los obstáculos más peligrosos no siempre son los peñascos o los acantilados, que las cámaras ven con facilidad, sino parches de suelo suelto engañosamente liso. Cuando las ruedas del rover patinan en este tipo de terreno, el vehículo se desliza, avanza mucho más despacio de lo ordenado, desperdicia energía y puede quedar inmovilizado de forma permanente. Los sistemas de navegación tradicionales se concentran principalmente en peligros geométricos visibles—lo que parece un obstáculo y lo que no—sin capturar totalmente cómo se comportará el suelo bajo las ruedas. Al mismo tiempo, los métodos de aprendizaje automático que intentan predecir el deslizamiento de las ruedas a partir de imágenes y mapas 3D pueden fallar en condiciones desconocidas, como con iluminación diferente o pendientes más pronunciadas, y por lo general no indican cuánta incertidumbre tienen sus predicciones.
Enseñar al rover a razonar sobre el riesgo
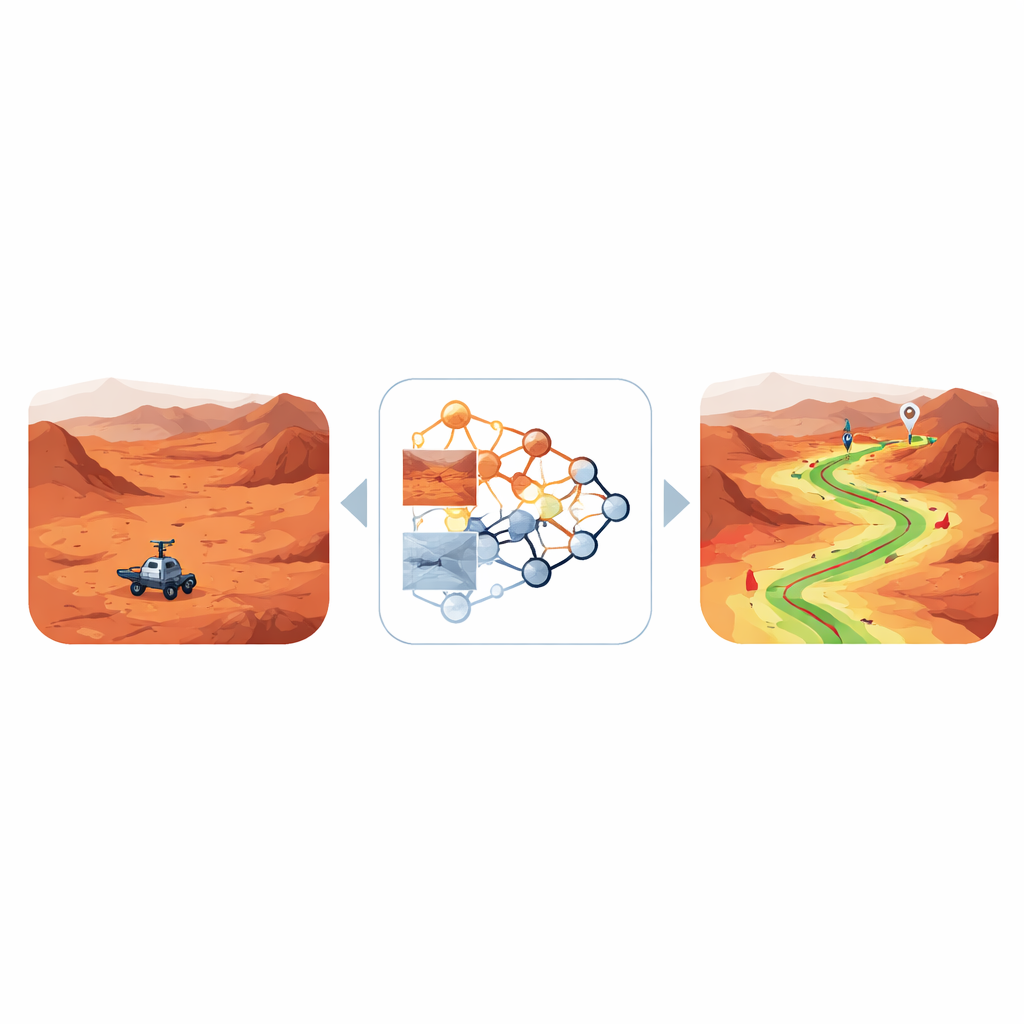
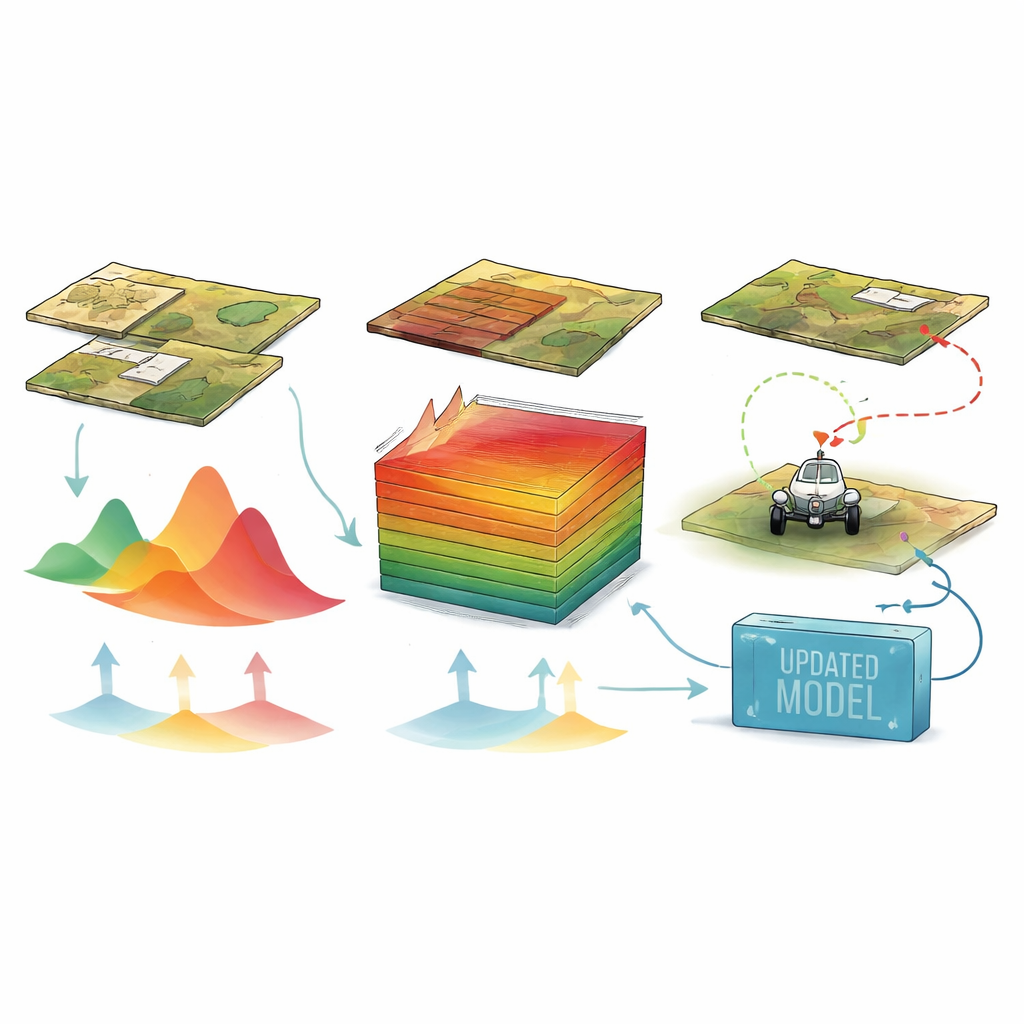
Los autores proponen un marco integrado de aprendizaje y planificación que llaman travesabilidad probabilística profunda. En lugar de producir una única "mejor estimación" de cuánto patinarán las ruedas en cada parche de terreno, su modelo predice una distribución de probabilidad completa de posibles deslizamientos, basada en imágenes en color y la pendiente local. Un conjunto (ensemble) de redes neuronales profundas observa el paisaje desde arriba y, para cada movimiento posible en una rejilla, ofrece tanto un valor esperado de deslizamiento como su incertidumbre. A partir de esta distribución, el sistema traduce el deslizamiento en una velocidad efectiva de conducción y, en última instancia, en un coste de tiempo de viaje para cada paso. Las zonas donde es probable que el rover se quede atascado reciben costes muy elevados; las áreas donde la predicción es favorable y confiable obtienen costes bajos. Un algoritmo estándar de búsqueda de rutas encuentra entonces un trayecto que negocia la distancia corta frente a un bajo riesgo de inmovilización.
Permitir que el rover aprenda mientras avanza
Un desafío importante en la exploración planetaria es que las condiciones que encuentra un rover al llegar pueden diferir significativamente de las de sus datos de entrenamiento: las pendientes pueden ser más empinadas, las propiedades del suelo desconocidas o la iluminación muy distinta. Para afrontar esto, el marco incluye un mecanismo de adaptación en tiempo de prueba. A medida que el rover avanza, mide el deslizamiento real que experimenta. Después de cada pequeño movimiento, estas mediciones recientes se usan para ajustar suavemente capas añadidas de "escala y desplazamiento" en las redes neuronales manteniendo fijos los pesos originales. Esta estrategia permite que el modelo se adapte rápidamente a nuevos terrenos usando solo unas pocas observaciones, al tiempo que preserva lo que ya ha aprendido sobre condiciones previas. Las predicciones actualizadas se retroalimentan luego en la replanteación de la ruta, de modo que el camino elegido puede mejorar en tiempo real.
Poner el sistema a prueba con retos exigentes
Dado que los datos reales de rovers cubren solo tipos limitados de terreno, el equipo construyó un gran conjunto sintético de paisajes tipo marciano. Combinaron topografías generadas por ordenador con diez clases de terreno ocultas, cada una con su propio color y comportamiento de deslizamiento, y variaron tanto la inclinación de las pendientes como la dirección de la iluminación para crear escenarios familiares y no familiares. En miles de misiones simuladas, el nuevo método se comparó con dos planificadores de última generación que o bien ignoran la incertidumbre o la usan de forma menos directa. En condiciones familiares, todos los enfoques se comportaron de forma similar. Pero en los casos más desafiantes—iluminación tenue y terrenos pronunciados tipo cráter—el enfoque de travesabilidad probabilística profunda logró tasas de éxito más altas y un deslizamiento máximo menor, manteniendo tiempos de viaje competitivos. Cuando se habilitó la adaptación en tiempo real, el sistema redujo además los errores de predicción y mejoró la seguridad, especialmente en entornos que diferían notablemente del entrenamiento.
Qué significa esto para futuras misiones
Para un lector general, el mensaje clave es que este trabajo ofrece a los rovers planetarios una manera más cautelosa y autoconsciente de conducir sobre terrenos peligrosos. En lugar de confiar ciegamente en una única predicción sobre cómo agarrarán sus ruedas, los rovers pueden ahora sopesar tanto el comportamiento esperado como la incertidumbre, eligiendo rutas que sean rápidas pero poco propensas a dejarlos varados. Al aprender continuamente de su propia experiencia de deslizamiento, pueden adaptarse a arenas, pendientes e iluminaciones nuevas sin necesidad de rescate humano. A medida que las agencias espaciales planifican misiones de superficie más largas y ambiciosas, una navegación consciente de la incertidumbre podría ayudar a que los valiosos robots pasen más tiempo explorando nuevos objetivos científicos y menos tiempo intentando salir de problemas.
Cita: Endo, M., Taniai, T. & Ishigami, G. Deep probabilistic traversability with test-time adaptation for uncertainty-aware planetary rover navigation. Sci Rep 16, 9499 (2026). https://doi.org/10.1038/s41598-026-40109-1
Palabras clave: navegación de rovers planetarios, travesabilidad del terreno, planificación consciente de la incertidumbre, robótica y aprendizaje automático, exploración autónoma