Clear Sky Science · es
InFoRM: un modelo unificado inverso y directo para el control sensorimotor
Cómo el cerebro podría simplificar el movimiento
Cada vez que alcanzas una taza o pulsas un teclado, tu cerebro debe transformar una intención ("mover mi mano allí") en una actividad muscular precisa y, al mismo tiempo, predecir qué sensación producirá ese movimiento. Las teorías clásicas asumen que el cerebro utiliza dos calculadoras internas separadas para esta tarea: una para generar las órdenes a los músculos y otra para predecir las sensaciones entrantes. Este estudio explora una alternativa audaz: que un único circuito unificado podría encargarse de ambos aspectos del problema, ahorrando energía y mejorando el rendimiento.
Dos maneras de concebir el control
Los modelos tradicionales del control del movimiento imaginan un sistema dividido. Una parte "inversa" convierte un resultado deseado (por ejemplo, la trayectoria de la punta del dedo en el espacio) en las activaciones musculares necesarias, mientras que una parte "directa" predice cómo se moverá el cuerpo y qué retroalimentación sensorial se generará. Estas dos piezas suelen representarse como cajas separadas en los manuales. Sin embargo, los datos de imagen cerebral y de lesiones no apoyan claramente una separación tan nítida, y algunas regiones cerebrales parecen participar en ambos roles. Además, mantener dos circuitos complejos activos puede ser costoso metabólicamente. Por ello, los autores se preguntan si una única red flexible podría aprender a producir comandos motores, predecir la retroalimentación sensorial e incluso inferir la meta original solo a partir de las señales internas.
Una sola red que lo hace todo
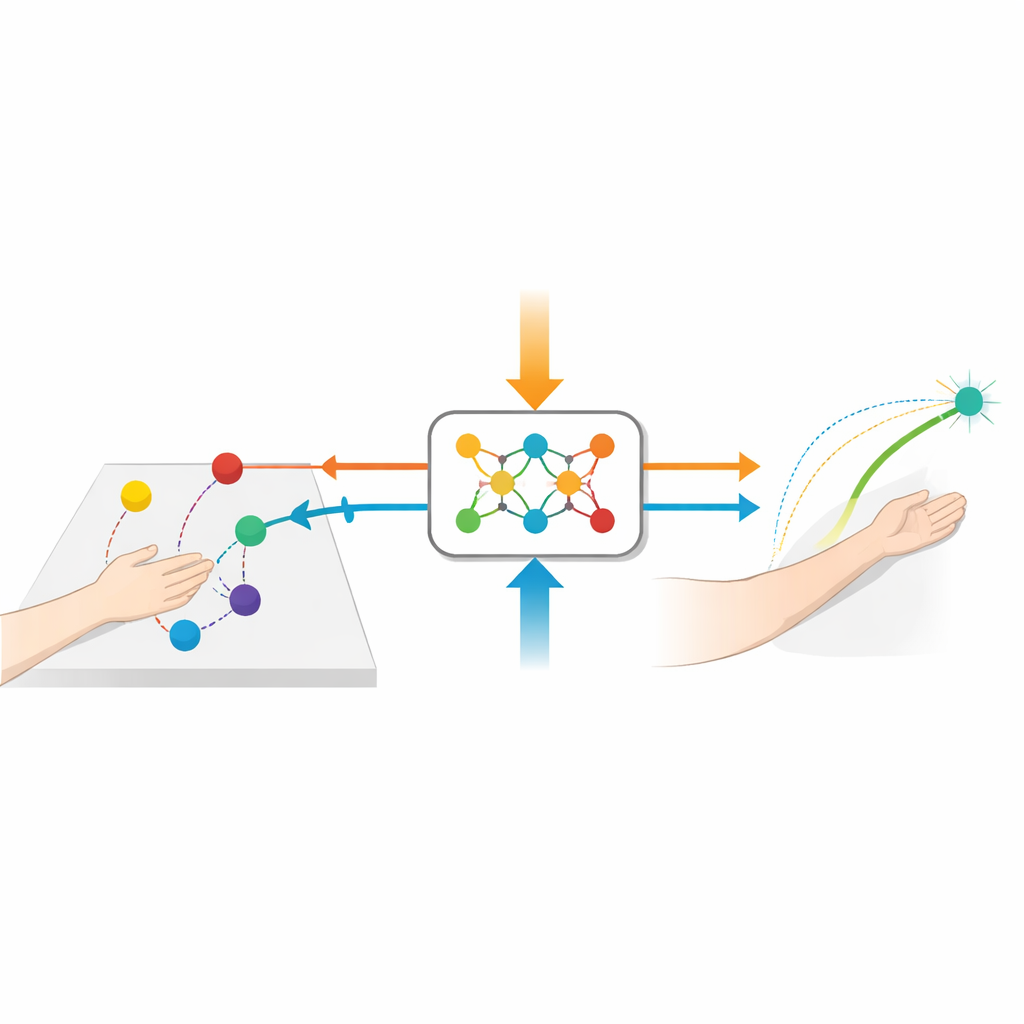
Para poner a prueba esta idea, los investigadores construyeron un modelo computacional llamado InFoRM (abreviatura de inverse–forward–recognition model). En lugar de dos módulos apilados, InFoRM utiliza una única red neuronal recurrente—una red de unidades interconectadas—en la que confluyen señales de meta, motoras y sensoriales. Desde este "reservorio" común de actividad se entrenan en paralelo tres lecturas de salida: una reconstruye la trayectoria deseada de la mano, otra genera las activaciones musculares necesarias para lograrla y una tercera predice las señales sensoriales (longitud y velocidad muscular) que seguirían. De forma crucial, las mismas dinámicas internas sostienen las tres tareas a la vez, de modo que el modelo puede compartir información entre ellas en lugar de aprender cada una de forma aislada.
Poniendo el modelo a prueba en el mundo real
El equipo registró movimientos reales del brazo de voluntarios que alcanzaban rítmicamente desde un punto central hacia dianas dispuestas en distintas direcciones y distancias sobre una mesa. Los datos de captura de movimiento y un modelo musculoesquelético detallado aportaron, para cada movimiento, la trayectoria de la punta del dedo, las activaciones musculares estimadas y las señales análogas a las sensoriales procedentes de los músculos. InFoRM se entrenó con un subconjunto de direcciones y luego se evaluó en varios escenarios exigentes: repetir movimientos aprendidos, generar movimientos en nuevas direcciones intermedias ("morfear" entre lo que había visto) y manejar transiciones naturales y autoelegidas entre dianas. Para comparar, los autores también construyeron arquitecturas de control más clásicas con redes inversa y directa separadas, además de variantes mejoradas a las que se les proporcionó información de entrada adicional.

Predicciones más nítidas con menos recursos
En todas las pruebas, la red unificada InFoRM reprodujo los movimientos y las señales musculares registradas con mayor precisión que cualquiera de las arquitecturas separadas. Sus salidas siguieron las señales reales más de cerca y con errores menores, incluso cuando se le pidió interpolar a direcciones no entrenadas o afrontar secuencias de dianas realistas y no guionizadas. Es importante señalar que InFoRM alcanzó esta mayor precisión usando un número comparable o menor de neuronas y necesitando muchas menos iteraciones de entrenamiento, lo que sugiere una mejor eficiencia computacional. El hecho de que también superara al mejor modelo de control aumentado—uno que tenía acceso a la misma combinación de información de meta, motora y sensorial—indica que la ventaja proviene de integrar todo en un único circuito recurrente, no solo de disponer de entradas más ricas.
Qué implica esto para entender el cerebro
Los hallazgos apoyan la idea de que el cerebro podría no mantener motores "directos" e "inversos" claramente separados para el movimiento. En su lugar, un único circuito ricamente conectado podría contener implícitamente ambos, con comandos motores y predicciones emergiendo de las mismas dinámicas subyacentes. Esta perspectiva encaja bien con las visiones modernas del cerebro como una máquina predictiva, que genera y actualiza constantemente expectativas sobre su propio cuerpo y el mundo. Aunque el modelo sigue siendo una abstracción simplificada y quedan por explorar detalles biológicos como los retardos nerviosos y los cambios sinápticos, InFoRM muestra que un diseño unificado puede ser a la vez potente y económico, ofreciendo un plano alternativo convincente sobre cómo nuestro sistema nervioso podría controlar el movimiento.
Cita: de Graaf, M.L., Kloock, L., Schwarze, A. et al. InFoRM: a unified inverse and forward model for sensorimotor control. Sci Rep 16, 8490 (2026). https://doi.org/10.1038/s41598-026-39944-z
Palabras clave: control sensorimotor, modelos internos, redes neuronales, aprendizaje motor, procesamiento predictivo