Clear Sky Science · es
Mejora de la extracción de carreteras en teledetección mediante DS-Unet con atención complementaria y gradientes sustitutos
Mapas más nítidos desde el espacio
Los mapas digitales modernos dependen en gran medida de fotos satelitales y aéreas, pero trazar automáticamente las carreteras en estas imágenes resulta sorprendentemente difícil. Sombras, árboles, caminos de tierra y cambios estacionales pueden confundir a los programas informáticos, provocando carreteras rotas o falsas en el mapa. Este artículo presenta un nuevo método de análisis de imágenes, llamado DS-Unet, que pretende extraer redes viarias más limpias y completas a partir de imágenes de teledetección, haciendo que los mapas futuros sean más fiables para la navegación, la planificación y la respuesta a desastres.
Por qué es tan difícil encontrar carreteras
Visto desde lo alto, las carreteras reales serpentean por ciudades, campos y fábricas, a menudo ocultas por edificios, vegetación y luz cambiante. Los sistemas tradicionales de aprendizaje profundo, que ya impulsan muchos servicios de cartografía, analizan las imágenes por partes. Son buenos detectando patrones locales, como una franja de asfalto, pero les cuesta entender cómo piezas distantes se conectan para formar una vía continua. Como resultado, pueden pasar por alto calles estrechas en pueblos densos, fragmentar autopistas largas o confundir rasgos de apariencia similar, como caminos de tierra o marcas en aparcamientos, con carreteras reales.
Una nueva forma de combinar lo que ve la red
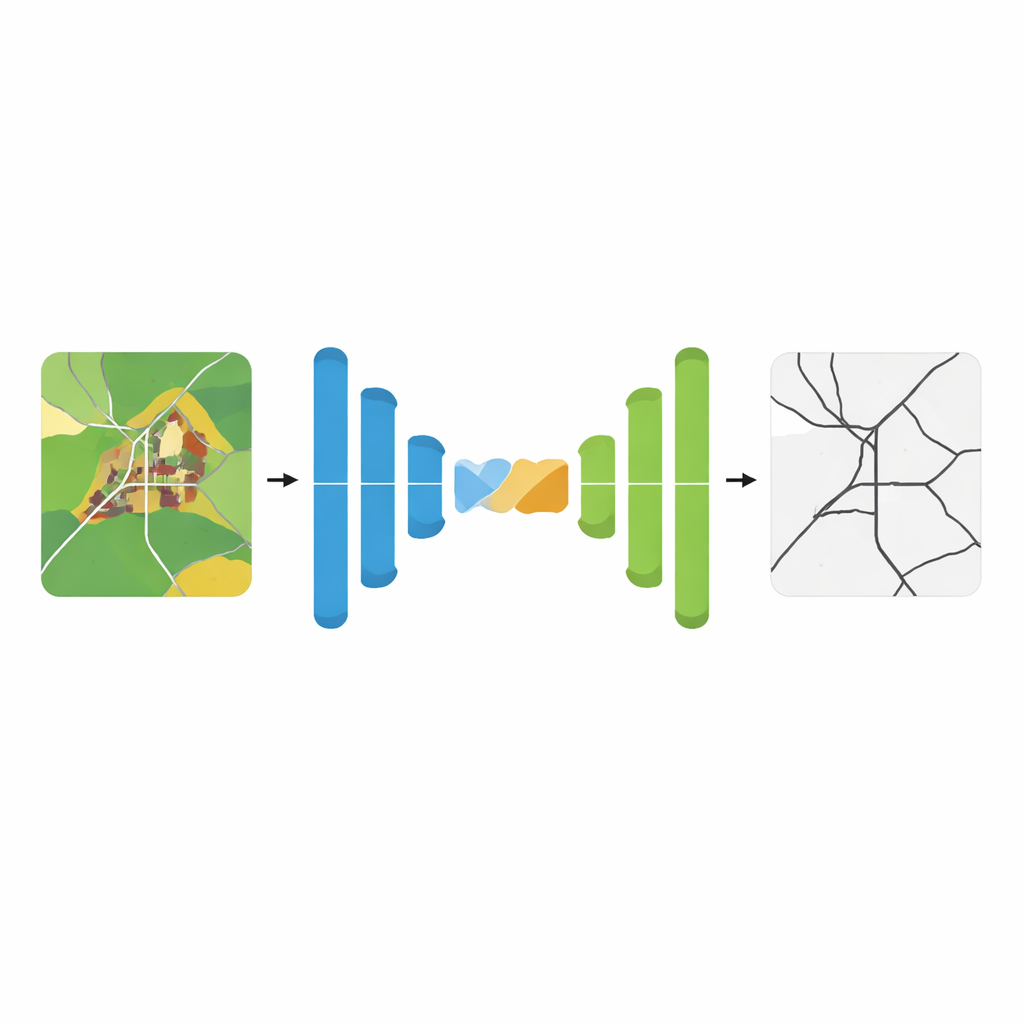
DS-Unet se basa en un diseño de red neuronal popular que procesa una imagen mediante una vía contractiva (que resume los detalles) y una vía expansiva (que reconstruye una predicción a resolución completa). Los diseños clásicos enlazan estas vías con atajos sencillos que transmiten detalles visuales tempranos. Los autores sostienen que estos atajos mezclan la información de forma tosca, a menudo combinando bordes útiles de carreteras con patrones de fondo distractores. DS-Unet los sustituye por un conector más inteligente, el Módulo de Fusión de Atención Complementaria, que intenta resaltar los detalles adecuados al tiempo que mantiene una visión general.
Permitir que la red se concentre y vea en amplio
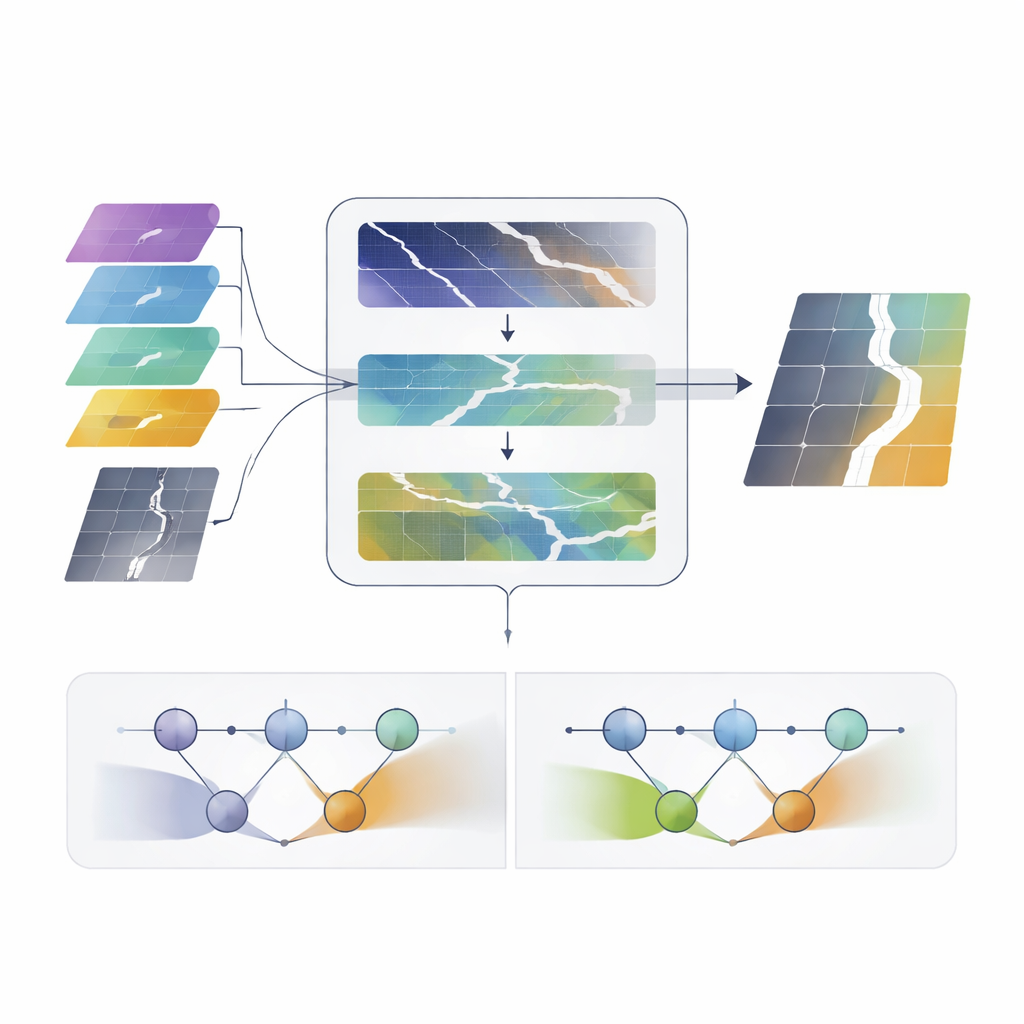
El nuevo módulo de fusión funciona en dos etapas que se complementan. Primero, una fase “discriminativa” se centra en lo que hace que las carreteras destaquen de su entorno. Efectivamente resta patrones de fondo amplios y con pocos detalles de los mapas de características, actuando como un filtro pasaaltos que agudiza los bordes y la textura de las carreteras mientras suprime elementos de ruido como campos o tejados. A continuación, una fase de “contexto global” recoge información de toda la imagen para que segmentos de carretera distantes puedan considerarse parte de una misma red. Al combinar estas dos perspectivas, el modelo conserva mejor calles diminutas en pueblos y mantiene bucles y curvas continuos en zonas industriales.
Mantener vivo el proceso de aprendizaje
Las redes profundas aprenden ajustando muchas “neuronas” internas, pero una regla de activación común, conocida por su simplicidad y rapidez, puede hacer que algunas neuronas dejen de actualizarse por completo. Cuando demasiadas se silencian, el entrenamiento se vuelve inestable y las predicciones finales pierden detalle fino. Para evitarlo, los autores adoptan una técnica que denominan SUGAR, que mantiene la regla simple para los cálculos hacia adelante pero usa un gradiente artificial más suave entre bastidores cuando el modelo se actualiza. Este truco mantiene el flujo de las señales de gradiente incluso cuando las entradas son débiles, de modo que más neuronas permanecen activas y pueden contribuir a aprender patrones sutiles de las carreteras.
Demostrando su eficacia en el mundo real
Para evaluar DS-Unet, el equipo usó dos colecciones conocidas de imágenes satelitales de carreteras procedentes de distintas regiones y paisajes. Cortaron las imágenes grandes en teselas manejables, aplicaron variaciones realistas de brillo, color y orientación, y luego entrenaron su sistema junto a 17 métodos líderes de extracción de carreteras y segmentación, que incluyeron tanto redes convolucionales clásicas como diseños más recientes basados en transformadores. En todas las medidas clave de precisión —qué parte del área real de la carretera se captura, con qué frecuencia se evitan carreteras falsas y cuánto se solapan los mapas predichos y reales— DS-Unet destacó consistentemente, y al mismo tiempo funcionó con la suficiente rapidez como para ser práctico en cartografía a gran escala.
Qué significa esto para mapas mejores
En términos simples, este trabajo muestra que enseñar a una red neuronal a eliminar el ruido de fondo y a comprender la disposición amplia de una escena puede ofrecer mapas de carreteras más limpios y conectados a partir de imágenes satelitales. Unido a una regla de aprendizaje más estable que mantiene las unidades internas del modelo mejorando activamente, DS-Unet traza calles estrechas de pueblos, evita confundir caminos de tierra con carreteras reales y enlaza fragmentos dispersos en redes coherentes mejor que los sistemas existentes. A medida que agencias cartográficas y empresas tecnológicas avanzan hacia mapas totalmente automatizados y actualizados con frecuencia, enfoques como DS-Unet podrían desempeñar un papel clave en convertir imágenes en bruto en información viaria precisa y útil para la vida cotidiana.
Cita: Wang, J., Huang, Z., Ren, C. et al. Enhancing remote sensing road extraction via DS-Unet with complementary attention and surrogate gradients. Sci Rep 16, 9044 (2026). https://doi.org/10.1038/s41598-026-39811-x
Palabras clave: carreteras en teledetección, cartografía por satélite, segmentación mediante aprendizaje profundo, redes basadas en atención, análisis de imágenes aéreas