Clear Sky Science · es
Atenuación del ruido de medida en un predictor de Smith modificado y controladores automáticos de offset para sistemas integrador con retardo
Por qué importa en la tecnología cotidiana
Muchos dispositivos de los que dependemos —desde plantas químicas y sistemas eléctricos hasta coches y pequeños montajes de laboratorio— deben reaccionar a lecturas de sensores que llegan con retraso y están contaminadas por ruido. Este artículo plantea una pregunta simple pero crucial: cuando las señales están retardadas y ruidosas, ¿qué tipo de controlador automático mantiene el sistema estable, preciso y sin castigar el equipo? Los autores comparan un método popular basado en predicción con un enfoque más reciente que estima y cancela activamente las perturbaciones, y muestran por qué uno resulta mucho más fiable en el mundo real y ruidoso.
Reacciones retardadas y lecturas de sensores inestables
En muchos procesos, cambiar una entrada (como la potencia de un calentador o la posición de una válvula) no afecta inmediatamente a la salida. Existe un retardo inherente mientras el calor se propaga, los químicos se mezclan o las piezas mecánicas se mueven. Los ingenieros suelen describir estos sistemas como un “integrador más tiempo muerto”: la salida sigue acumulando el efecto de la entrada, pero solo después de un periodo de espera. Al mismo tiempo, los sensores que miden temperatura, flujo o posición siempre contienen algo de ruido aleatorio. Por tanto, un controlador debe gobernar un sistema cuya respuesta está retrasada y se observa a través de una lente con fluctuaciones. Si esto se hace mal, la señal de control puede oscilar violentamente, desgastar los actuadores y aun así no alcanzar el valor objetivo deseado.
Predictor clásico frente a eliminador de offset
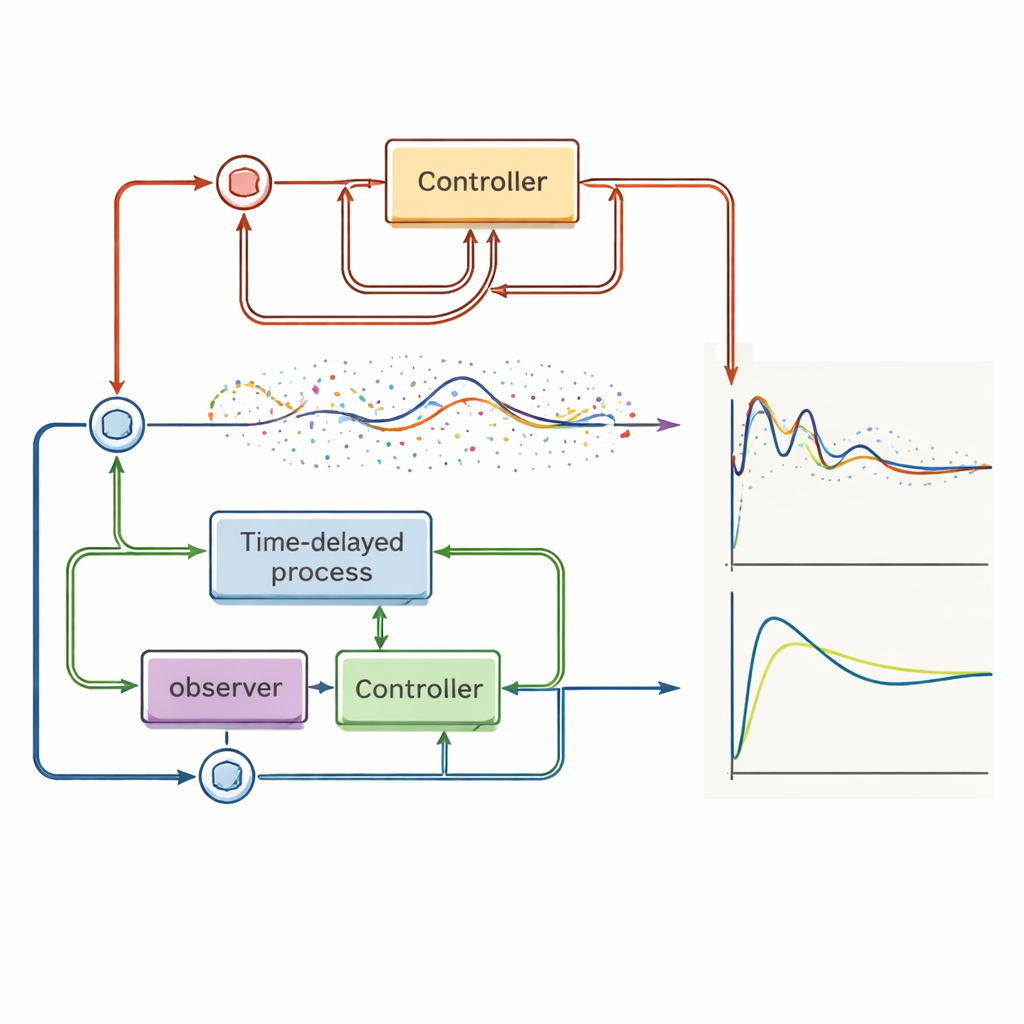
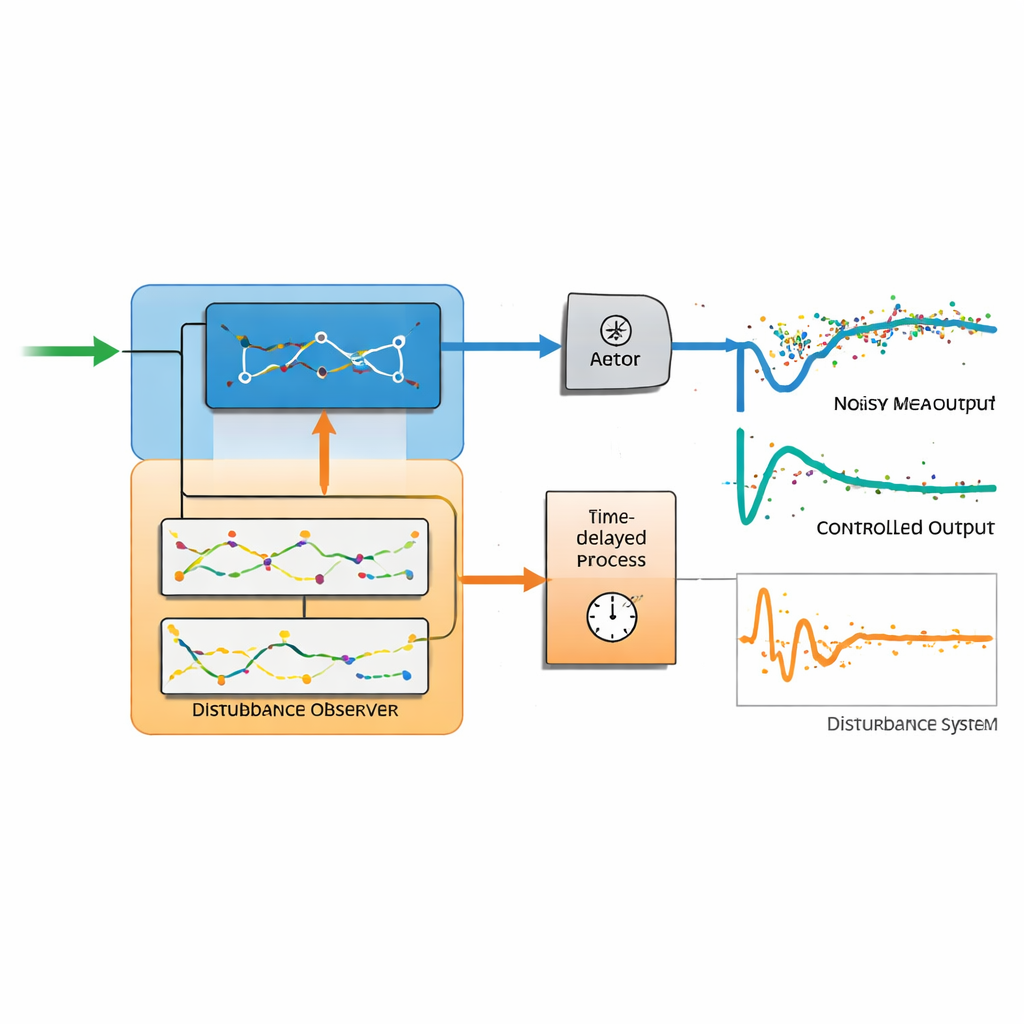
El predictor de Smith clásico y su variante moderna, el predictor Åström–Smith, abordan el retardo construyendo un modelo interno del proceso y usándolo para predecir la salida futura. En condiciones ideales, esto puede dar respuestas rápidas y precisas. El diseño competidor examinado aquí, llamado controlador automático de offset, sigue otra ruta. Combina un controlador estabilizante ordinario con un observador de perturbaciones: un módulo que infiere las perturbaciones ocultas que actúan sobre la entrada y las cancela automáticamente. La clave es que este observador usa un modelo interno completo del sistema con retardo, junto con filtros pasa‑bajo cuidadosamente diseñados y, si es necesario, derivadas de orden superior de la salida. Esta estructura permite a los ingenieros ajustar la velocidad con que se reconstruyen las perturbaciones sin afectar la capacidad del sistema para seguir un consigna deseada.
Qué ocurre cuando el ruido es real, no ideal
Cuando los autores introducen ruido de medida realista en simulaciones y experimentos, la diferencia entre ambos enfoques se vuelve nítida. El controlador basado en predictor, que depende de varios bloques integradores marginalmente estables, se vuelve extremadamente sensible al ruido. Incluso para niveles de ruido tan bajos como aproximadamente el uno por ciento de la señal, el esfuerzo de control se dispara —cientos a miles de veces mayor que con el controlador automático de offset— y la señal del actuador se vuelve violentamente inestable. Peor aún, el predictor ya no puede garantizar que la salida alcance finalmente la consigna: aparecen offsets persistentes e incluso inestabilidad, especialmente cuando los actuadores alcanzan sus límites de saturación. En contraste, el controlador automático de offset mantiene señales de control suaves, rechaza eficazmente perturbaciones constantes y mantiene la salida cerca del valor objetivo, gracias a su filtrado y a la estructura de estimación de perturbaciones.
Poniendo los métodos a prueba práctica
El artículo no se queda en modelos abstractos. Los autores aplican ambos controladores a un reactor químico inestable aproximado por un modelo dominado por retardos, y a un montaje térmico de laboratorio real construido alrededor de una lámpara, un sensor de temperatura y un ventilador de refrigeración. En el caso inestable, el controlador automático de offset sigue funcionando de forma fiable, aunque su ajuste debe suavizarse para evitar sobreimpulsos, mientras que el método basado en predictor sufre errores crecientes a medida que el ruido se intensifica. En la planta térmica, el controlador automático de offset produce respuestas próximas al tiempo‑óptimo que son suaves tanto en temperatura como en el esfuerzo de control, incluso cuando el ventilador introduce cambios bruscos. El controlador basado en predictor, en contraste, muestra errores estacionarios visibles y un comportamiento notablemente más lento y menos fiable siempre que hay ruido realista y límites de actuadores.
Qué significa esto para los controladores futuros
Desde una perspectiva general, la conclusión es clara: un controlador que simplemente predice el futuro basándose en un modelo ideal puede parecer impresionante en teoría, pero puede comportarse mal cuando aparecen ruido y límites del mundo real. El controlador automático de offset, con su observador de perturbaciones integrado y su modelo interno filtrado, demuestra ser más robusto, más preciso y más fácil de ajustar en una amplia gama de procesos con retardo. Los autores concluyen que, aunque un predictor de Smith modificado puede seguir siendo útil en situaciones de nicho con bajo ruido, un diseño basado en observador de perturbaciones es una opción predeterminada más sencilla y fiable para los sistemas de control modernos donde los sensores son imperfectos y la estabilidad importa de verdad.
Cita: Huba, M., Bistak, P. & Vrancic, D. Measurement noise attenuation in modified Smith predictor and automatic offset controllers for integrator plus dead-time system. Sci Rep 16, 8335 (2026). https://doi.org/10.1038/s41598-026-39732-9
Palabras clave: control con retardo, observador de perturbaciones, ruido de medida, controlador automático de offset, predictor de Smith