Clear Sky Science · es
Control predictivo directo secuencial de velocidad de PMSM
Control más inteligente para motores eléctricos cotidianos
Los motores eléctricos impulsan silenciosamente líneas de fábrica, bombas, robots e incluso algunos electrodomésticos. Hacer que estos motores funcionen de forma eficiente y suave ahorra energía, reduce el ruido y el desgaste, y mejora la fiabilidad. Este artículo explora una nueva forma de controlar un tipo de motor muy utilizado para que reaccione rápidamente a los cambios sin volverse inestable ni generar un exceso de "ruido" eléctrico. Los autores se centran en una estrategia que promete un ajuste más sencillo para los ingenieros, al tiempo que ofrece un control de velocidad rápido y preciso.
Por qué los controles actuales de motores son difíciles de ajustar
Los motores síncronos de imanes permanentes se usan ampliamente porque son compactos, eficientes y capaces de un control preciso de la velocidad. Los esquemas de control tradicionales se basan en varios bucles anidados y un conjunto de perillas de ajuste que los ingenieros deben modificar por ensayo y error. Los enfoques más recientes, basados en control predictivo, intentan elegir la mejor acción para el motor una fracción de segundo en el futuro, mejorando el tiempo de reacción y permitiendo manejar múltiples objetivos (como precisión de velocidad y bajo consumo de corriente) a la vez. Sin embargo, estos controladores predictivos suelen combinar todos los objetivos en una gran expresión matemática que depende de varios “factores de ponderación”. Elegir estos pesos es notoriamente difícil: una buena elección puede dar un rendimiento excelente, mientras que una mala puede volver el sistema lento o incluso inestable.
Una forma paso a paso de tomar decisiones
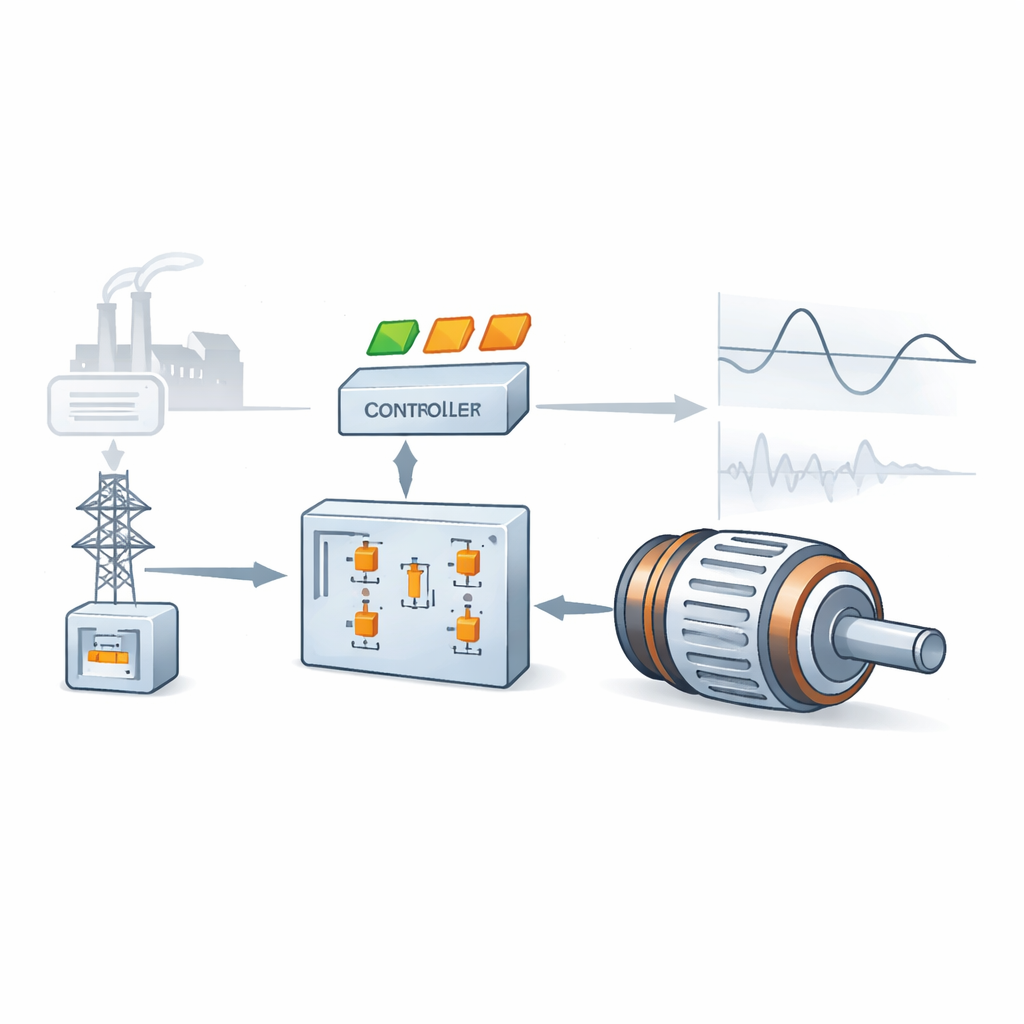
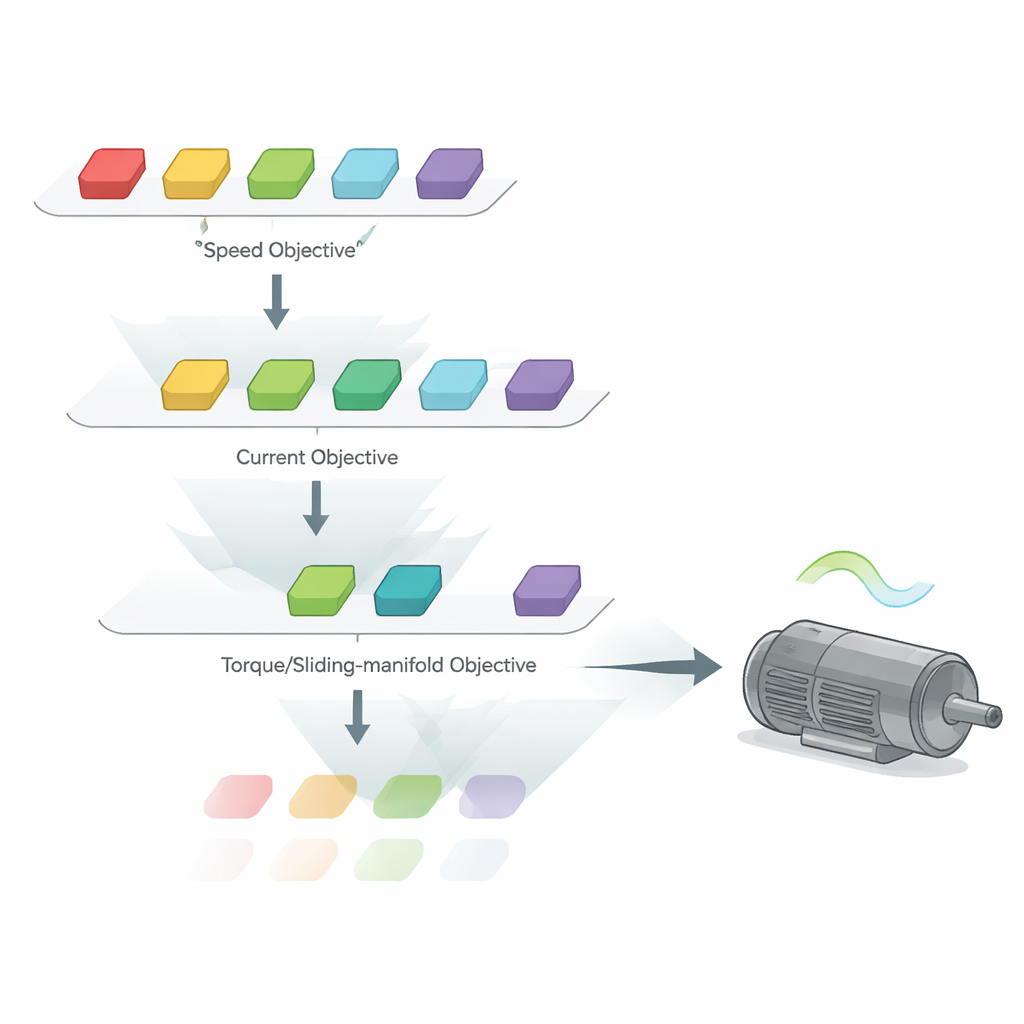
En lugar de agrupar todos los objetivos en una fórmula complicada, los autores estudian un enfoque "secuencial". Aquí, el controlador sigue prediciendo cómo se comportará el motor para cada posición posible de los interruptores en la electrónica de potencia, pero evalúa objetivos separados y más sencillos uno tras otro. Primero elimina las opciones de conmutación que darían un comportamiento de velocidad deficiente. Luego, entre las opciones restantes, mantiene solo las que hacen un uso eficiente de la corriente. Finalmente, selecciona la opción que mejor moldea el par del motor, utilizando una regla deslizante especial que vincula el error de velocidad y el error de par para que la velocidad del motor converja más rápido. Debido a que cada paso se centra en un único objetivo, no es necesario equilibrar varios factores de ponderación; en su lugar, el controlador usa un proceso lógico de eliminación. Un observador complementario estima el par de carga desconocido en el eje para que las predicciones sigan siendo precisas incluso cuando el motor sufre perturbaciones.
Mejorando la estabilidad con un diseño mejorado
Cuando los autores probaron por primera vez este método secuencial, encontraron que, aunque respondía rápidamente a los cambios de velocidad, podía volverse inestable y producir grandes ondulaciones en la corriente del motor, especialmente cuando intentaban forzar una reacción más rápida. Para corregir esto, propusieron una versión mejorada que añade un giro inteligente al primer paso de decisión: no solo mira la velocidad prevista, sino que también penaliza suavemente ciertos componentes de la corriente, y escala esta penalización con la velocidad solicitada. A bajas velocidades, el controlador se centra más en mantener las corrientes calmadas; a velocidades mayores, permite una acción más fuerte para mantener el rendimiento. Este cambio hace posible usar una regla deslizante más agresiva para el par sin provocar inestabilidad. En simulaciones informáticas detalladas, el método mejorado igualó el tiempo de subida de un controlador predictivo convencional bien ajustado y produjo niveles similares de distorsión eléctrica, todo con menos parámetros de ajuste.
Poniendo el método a prueba en el laboratorio
El equipo implementó entonces tanto los controladores secuenciales originales como los mejorados en un accionamiento real de 1,1 kilovatios usando una plataforma de rápido prototipado. Los compararon con un controlador predictivo estándar en condiciones realistas, incluidas rampas de velocidad rápidas, aplicación súbita de carga e incluso inversión de la velocidad. El controlador secuencial original pudo regular la velocidad pero mostró pérdidas ocasionales de estabilidad y fuertes ondulaciones de corriente, particularmente a mayores velocidades. En contraste, la versión mejorada funcionó de forma estable en todo el rango probado. Al ajustar un único parámetro clave que moldea la regla deslizante, los investigadores pudieron negociar entre un seguimiento de velocidad más estricto y formas de onda de corriente más suaves. Ajustes intermedios ofrecieron un equilibrio práctico: los errores de velocidad se redujeron significativamente respecto a configuraciones conservadoras, mientras que el aumento de distorsión de la corriente se mantuvo aceptable.
Qué significa esto para los accionamientos del mundo real
Para quienes no son especialistas, el mensaje principal es que los autores han demostrado una forma más sencilla pero potente de controlar motores eléctricos de alto rendimiento. Su estrategia secuencial mejorada elimina gran parte de las conjeturas involucradas en el ajuste de controladores predictivos tradicionales, al tiempo que conserva reacciones rápidas a cambios de velocidad y perturbaciones. El método no es perfecto: las formas de onda de corriente siguen siendo algo más ruidosas de lo ideal, especialmente en ajustes muy exigentes, pero representa un paso importante hacia accionamientos de motor más robustos y fáciles de poner en servicio. Trabajos futuros se centrarán en reducir estas distorsiones de corriente y en analizar más a fondo la estabilidad, con el objetivo de hacer que este tipo de control secuencial inteligente sea adecuado para sistemas industriales más grandes y con regulación más estricta.
Cita: Pancurák, L., Horváth, K. & Kyslan, K. Sequential model predictive direct speed control of PMSM. Sci Rep 16, 8226 (2026). https://doi.org/10.1038/s41598-026-39256-2
Palabras clave: motor síncrono de imanes permanentes, control predictivo basado en modelo, control de velocidad del motor, control secuencial, accionamientos de electrónica de potencia