Clear Sky Science · es
Investigación sobre un método inteligente de reconocimiento de piezas mecánicas con alta similitud de características en entornos industriales
Por qué importa identificar piezas que parecen iguales
Las fábricas modernas dependen de robots para localizar, recoger y ensamblar miles de piezas metálicas pequeñas. Muchas de estas piezas —engranajes, rodamientos, piñones, tuercas y tornillos— se parecen de forma confusa, especialmente con iluminación adversa o cuando se superponen en una cinta transportadora. Si un robot confunde una por otra, el resultado puede ser atascos, defectos o incluso daños en las máquinas. Este estudio aborda una pregunta aparentemente sencilla con grandes consecuencias industriales: ¿cómo puede un sistema de visión compacto y rápido distinguir de forma fiable piezas casi idénticas en condiciones reales de taller?
Retos de la visión en la fábrica real
En el piso de producción, las cámaras rara vez disfrutan de las vistas limpias que se muestran en videos de demostración. La iluminación es desigual, provocando fuertes reflejos en el metal brillante y sombras profundas en otras zonas. Las piezas se vierten en contenedores o se esparcen en cintas, a menudo ocultándose parcialmente unas a otras. Para colmo, muchos componentes metálicos comparten formas, colores y texturas similares, dejando muy pocas pistas visuales obvias. El software tradicional que empareja plantillas o usa características diseñadas a mano tiene grandes dificultades en estas condiciones: es lento, frágil ante cambios de luz y suele fallar cuando las piezas se solapan o están rotadas de forma inesperada.
Partiendo de detectores rápidos de un solo paso
En los últimos años, una familia de modelos de inteligencia artificial llamada YOLO (por “You Only Look Once”) se ha popularizado para detectar objetos en imágenes en una sola y rápida pasada. YOLOv8, una de las versiones más recientes, ya equilibra bien precisión y velocidad y puede ejecutarse en tiempo real. Sin embargo, cuando las piezas diferentes se parecen casi por completo, incluso YOLOv8 puede pasar por alto señales sutiles o dibujar cuadros imprecisos. Intentos anteriores de reducir modelos YOLO para dispositivos pequeños tendían a recortar parámetros pero también debilitaban su capacidad para representar detalles finos, que es precisamente lo necesario para distinguir piezas mecánicas que se parecen entre sí.
Una red de detección más ligera pero más precisa
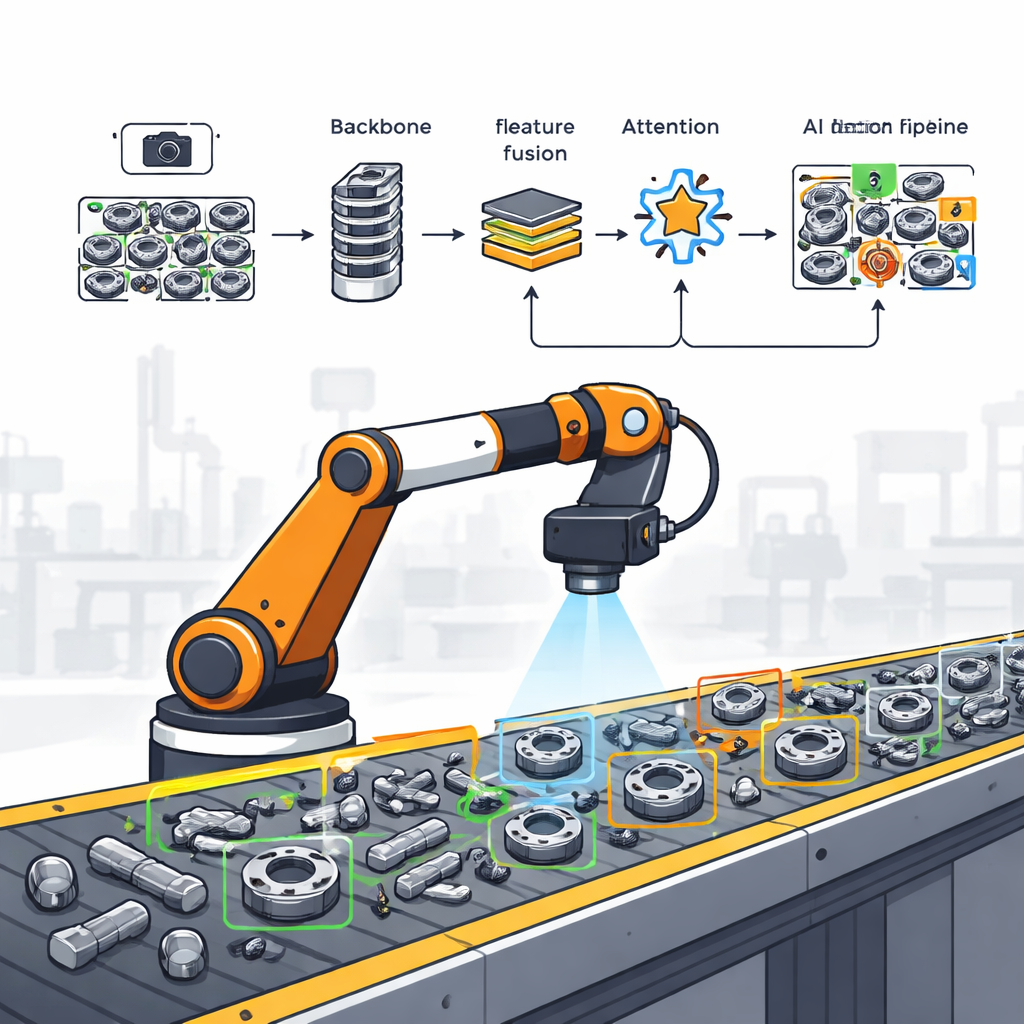
Los autores proponen una versión mejorada del modelo más pequeño de YOLOv8, llamado YOLOv8n, diseñada específicamente para piezas industriales confusas y para hardware con potencia de cálculo limitada. Primero, sustituyen el núcleo estándar de la red por un diseño más reciente llamado FasterNet, que emplea un truco de convolución “parcial” para trabajar solo en las regiones más útiles de la imagen en cada paso. Esto reduce trabajo repetido en memoria sin perder información visual clave. Segundo, rediseñan la “neck” intermedia de la red para usar una pirámide de características bidireccional (BiFPN), que permite que la información fluya tanto desde vistas globales y toscas hacia detalles finos como a la inversa, de modo que las piezas pequeñas y ocluidas se benefician del contexto y viceversa.
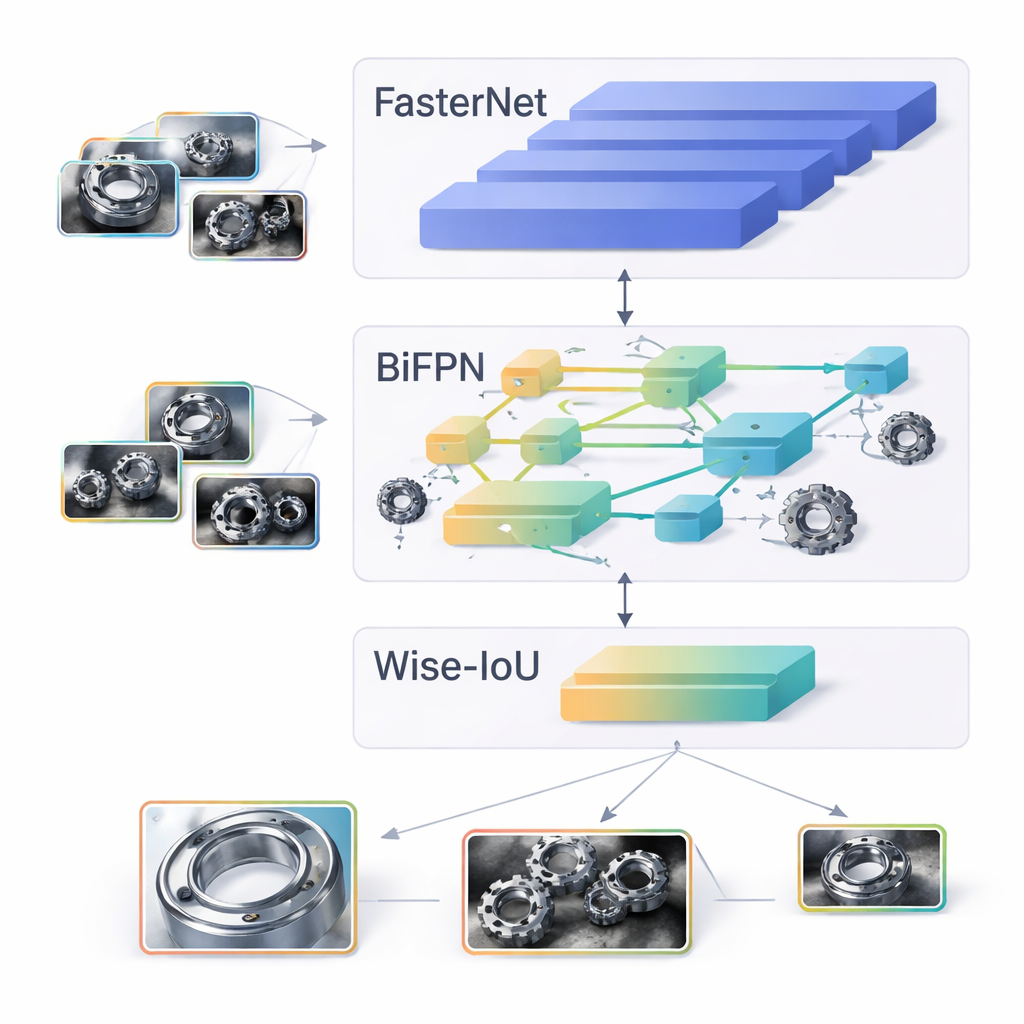
Enseñar a la red a ignorar pistas malas
Más allá de la arquitectura de la red, la forma en que aprende a ajustar sus parámetros internos —guiada por una función de pérdida— influye mucho en qué presta atención. Los métodos de entrenamiento estándar tratan la mayoría de los ejemplos más o menos por igual, lo que significa que cajas de entrenamiento de baja calidad (mal alineadas o ambiguas) pueden confundir al modelo. Los autores reemplazan la regla habitual de emparejamiento de cajas por un método llamado Wise‑IoU. En términos simples, este enfoque puntúa cada ejemplo de entrenamiento no solo por la superposición, sino por cuánto actúa como un “outlier”, y reduce discretamente la influencia de aquellos ejemplos poco fiables. Con el tiempo, el sistema aprende principalmente de piezas claras y bien etiquetadas, produciendo cajas de detección más ajustadas y más fiables, especialmente cuando las piezas se solapan o aparecen con iluminación difícil.
Poniendo el sistema a prueba
Para evaluar su diseño, el equipo creó su propia colección de imágenes de seis piezas mecánicas comunes, cada una capturada 1.250 veces bajo distintos niveles de luz y con grados variables de obstrucción mutua. Compararon su modelo mejorado con el YOLOv8n estándar y con varios otros detectores ligeros. El nuevo sistema logró una mayor calidad de detección global mientras usaba menos de dos tercios del cómputo y reducía el número de parámetros en torno a un 42%. En particular, aumentó una métrica clave llamada mean average precision en un umbral de uso común en 1,5 puntos porcentuales, manteniéndose lo bastante eficiente para uso en tiempo real en hardware modesto.
Qué supone esto para las fábricas inteligentes
En términos cotidianos, el estudio muestra que los robots de fábrica pueden volverse a la vez más inteligentes y más ligeros. Con el núcleo de red rediseñado, una fusión de características más eficiente y una regla de aprendizaje más selectiva, un modelo de IA pequeño puede distinguir con mayor fiabilidad entre engranajes, rodamientos y otras piezas que se parecen, en escenas desordenadas del mundo real, incluso cuando la iluminación es mala y las piezas se solapan. Esta combinación de mayor precisión y menor carga computacional facilita desplegar visión robusta en dispositivos edge de bajo coste, allanando el camino hacia líneas de producción más flexibles y completamente automatizadas sin necesitar servidores masivos o entornos perfectamente controlados.
Cita: Lu, C., Ye, X., Wu, J. et al. Research on intelligent recognition method of mechanical parts with high feature similarity in industrial field environment. Sci Rep 16, 7640 (2026). https://doi.org/10.1038/s41598-026-39036-y
Palabras clave: detección de objetos industriales, piezas mecánicas, aprendizaje profundo ligero, YOLOv8, automatización de fábricas