Clear Sky Science · es
Estrategia de reconstrucción de datos de trayectoria vehicular para reconocimiento en vídeo basada en un método de dos pasos de interpolación y filtrado
Por qué limpiar los datos de tráfico digitales es realmente importante
Cada vez que una cámara de tráfico observa cómo los coches atraviesan una intersección, genera un flujo oculto de datos que describe a dónde va cada vehículo, qué velocidad tiene y cómo acelera o frena. Esta información es valiosa para carreteras más seguras, semáforos más inteligentes y los futuros vehículos autónomos. Pero en la práctica esos datos son desordenados: los coches se ocultan detrás de camiones, los faros centellean bajo la lluvia y los sistemas de visión por ordenador cometen errores. Este estudio aborda una cuestión muy práctica: ¿cómo convertir esos datos de vídeo defectuosos en un registro fiable de cómo se mueven realmente los vehículos?
Cuando las cámaras interpretan mal el movimiento de los coches
El seguimiento basado en vídeo resulta atractivo porque es barato, no intrusivo y cubre grandes áreas. Sin embargo, la salida en bruto está plagada de dos problemas principales. El primero son errores evidentes, como un coche que parece saltar hacia atrás, detenerse instantáneamente desde velocidad de autopista o mostrar picos de aceleración imposibles. Estos suelen derivar de la oclusión, el desenfoque por movimiento o a que el software de seguimiento pierde momentáneamente el vehículo. El segundo problema es la vibración aleatoria: pequeñas oscilaciones rápidas en la posición reportada. Cuando la velocidad y la aceleración se calculan a partir de esas posiciones, las oscilaciones se amplifican, haciendo que una conducción normal parezca errática. Si no se corrigen, estos problemas pueden distorsionar los modelos de tráfico en más del 40 %, lo que a su vez puede inducir a error estudios de seguridad y sistemas de conducción automatizada.
Un plan de limpieza en dos pasos
Para reparar este daño, los autores proponen una estrategia de reconstrucción en dos pasos que funciona como un mecánico digital cuidadoso. El paso uno se centra en los errores evidentes: escanea el registro de cada vehículo en busca de velocidades y aceleraciones que rompan límites físicos sencillos, como un jerk extremadamente alto (cambios muy bruscos en la aceleración) o aceleraciones más allá de lo que un coche y un conductor reales pueden tolerar. Una vez localizados estos puntos atípicos, se reemplazan usando herramientas matemáticas llamadas interpolación, que estiman valores faltantes a partir de puntos cercanos y más fiables. El estudio compara varias variantes de interpolación y encuentra que un enfoque llamado interpolación de Hermite preserva mejor la forma natural de la trayectoria que el método más tradicional de Lagrange, especialmente cuando el movimiento es complejo.
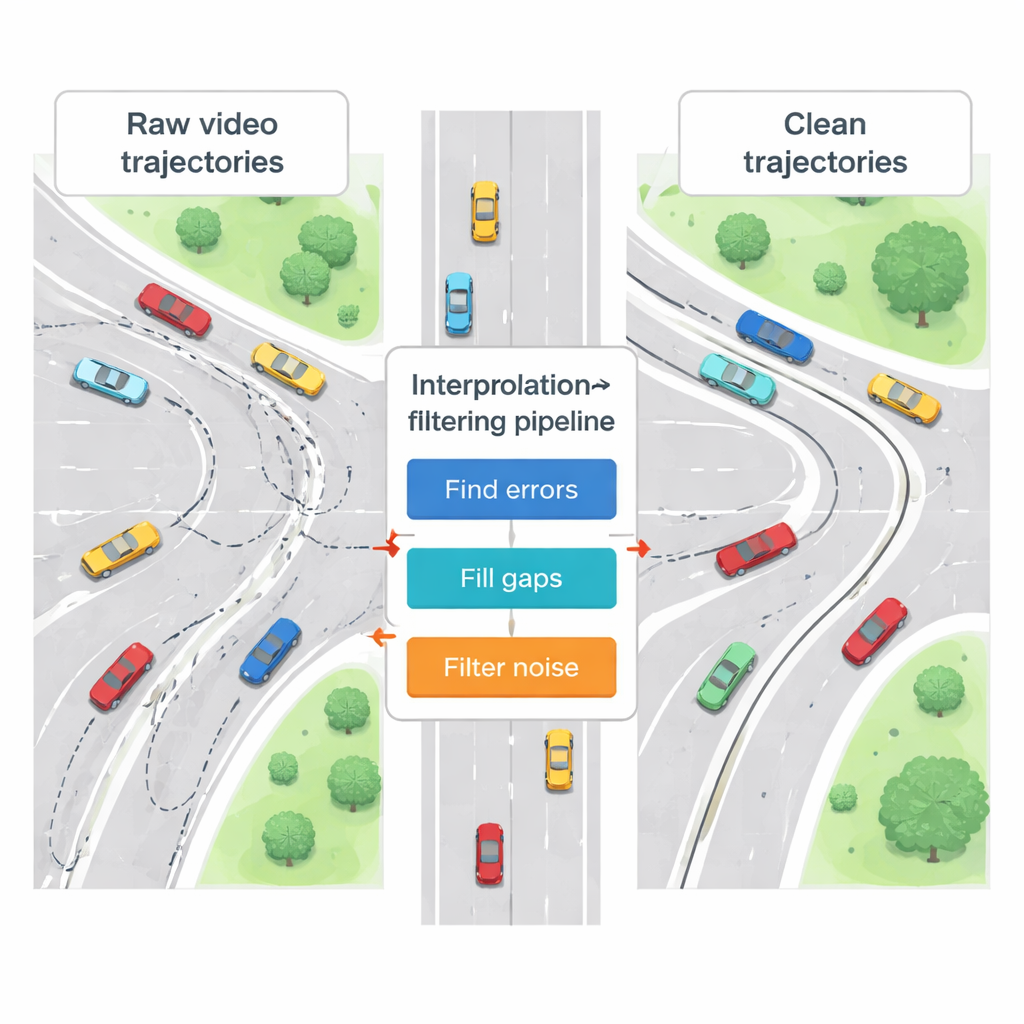
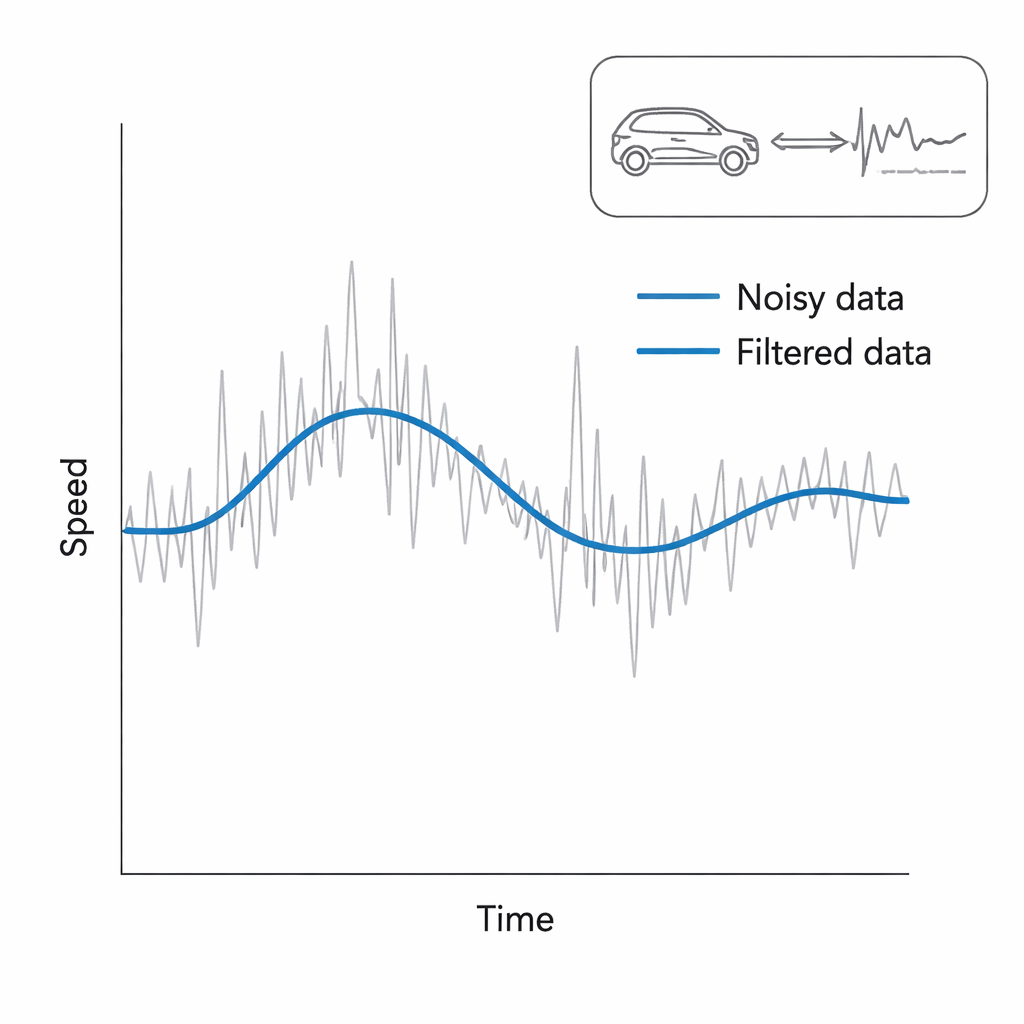
Suavizando el recorrido digital
El paso dos aborda el problema más sutil del ruido. Incluso después de corregir errores graves, las trazas restantes pueden seguir viéndose ligeramente inestables. Aquí los investigadores prueban dos formas de suavizar los datos: un método refinado de media móvil que da más peso a los puntos recientes y una técnica estadística conocida como filtro de Kalman, que actualiza continuamente su mejor estimación de la posición y velocidad reales de un coche a medida que llegan nuevas mediciones. Ambas técnicas reducen la vibración, pero el filtro de Kalman hace un mejor trabajo al seguir los cambios reales en la conducción —por ejemplo, una frenada suave o un cambio de carril— sin difuminarlos. El resultado es una descripción más suave y realista de cómo se comportó cada vehículo a lo largo del tiempo.
Poniendo el método a prueba
El equipo aplica su marco a vídeos reales capturados en una intersección urbana concurrida de Zhengzhou, China, usando software moderno de detección y seguimiento de objetos para extraer las trayectorias de los vehículos. Luego hacen pasar docenas de trazas por su proceso de dos pasos y evalúan el éxito con medidas físicas sencillas: cuánto fluctúa la aceleración y con qué frecuencia el jerk supera un nivel considerado poco realista para turismos. También comparan las trayectorias depuradas a partir de vídeo con datos de referencia registrados directamente desde los instrumentos del salpicadero de un coche. En muchos patrones de conducción —crucero estable, frenadas fuertes, cambios de carril— la estrategia combinada de interpolación y filtrado reduce la variabilidad de la aceleración en aproximadamente un 85 % y casi elimina los picos de jerk inverosímiles, además de ajustarse a los registros instrumentales mejor que varios métodos competidores.
Qué significa esto para la movilidad cotidiana
En términos sencillos, este artículo muestra cómo convertir imágenes imperfectas de cámaras de tráfico ordinarias en datos de los que los ingenieros y los vehículos autónomos realmente puedan fiarse. Al reparar primero las anomalías evidentes y después suavizar cuidadosamente el ruido, el método propuesto genera trazas digitales realistas del movimiento de los coches, sin exigir hardware exótico ni un gran consumo de computación. Esa imagen más limpia puede alimentar una mejor sincronización de semáforos, simulaciones de congestión más precisas y algoritmos de conducción autónoma más seguros que dependen de comprender el comportamiento real en carretera. Aunque el estudio se centra en una ciudad y aún no cubre todas las condiciones meteorológicas o de la vía, traza un camino claro y práctico para usar las redes de vídeo existentes como sensores fiables para la próxima generación de sistemas de transporte inteligente.
Cita: Ding, S., Zhang, S., Peng, F. et al. Reconstruction strategy of vehicle trajectory data for video recognition based on a two-step method of interpolation filtering. Sci Rep 16, 7428 (2026). https://doi.org/10.1038/s41598-026-38947-0
Palabras clave: trayectoria vehicular, datos de vídeo de tráfico, desruido de datos, transporte inteligente, conducción autónoma