Clear Sky Science · es
Control neuronal adaptativo basado en ESO para un quadrotor frente a perturbaciones de viento y carga útil
Mantener los drones estables en un mundo real desordenado
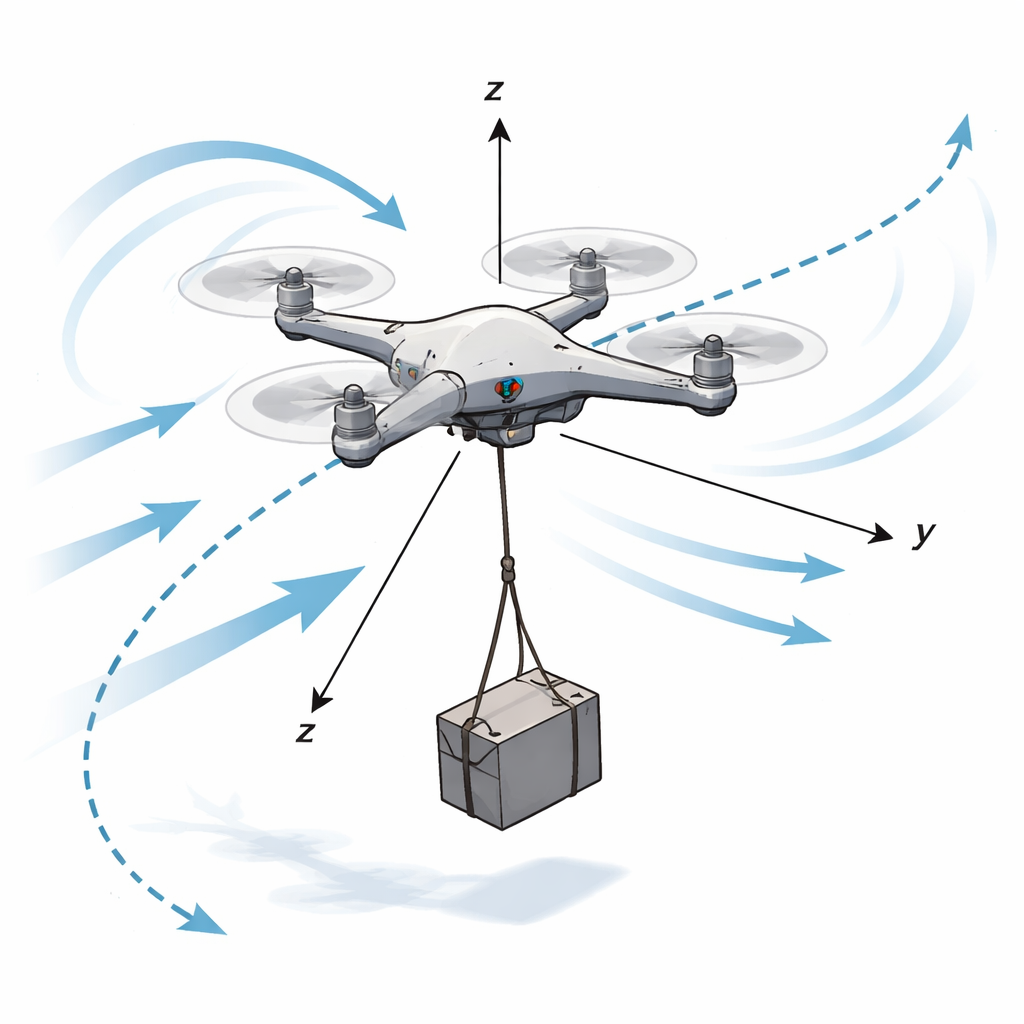
Los pequeños drones de cuatro rotores se emplean cada vez más en tareas como inspeccionar puentes, vigilar cultivos o transportar paquetes pequeños. Pero en el mundo real, estos robots voladores se enfrentan a ráfagas de viento y a cargas oscilantes colgando debajo de ellos, que pueden desviarlos fácilmente de su trayectoria. Este artículo presenta una nueva forma de mantener esos drones volando suavemente por sus rutas planificadas, incluso cuando el aire es turbulento y una carga que oscila les tira.
Por qué el viento y las cargas colgantes son tan problemáticos
Un drone quadrotor es intrínsecamente difícil de controlar. Es ligero, responde rápidamente a pequeños cambios en los motores y sus movimientos en distintas direcciones están fuertemente acoplados. Cuando ráfagas de viento fuertes o cambiantes golpean el dron, lo empujan de forma impredecible. Añadir una carga suspendida por cable, como un equipo de cámara o una botella con líquido, empeora la situación: la carga puede oscilar como un péndulo y devolver fuerzas adicionales al dron. Los controladores tradicionales, como el ampliamente usado PID o esquemas más avanzados de modo deslizante y backstepping, funcionan bien solo cuando los ingenieros conocen la física del dron con mucha precisión y cuando las perturbaciones son moderadas. Si el modelo matemático es inexacto, o si las fuerzas del viento y la carga varían de maneras complejas, estos métodos pueden producir respuestas lentas, sobreimpulso o balanceo visible en vuelo.
Un vigilante inteligente para perturbaciones ocultas
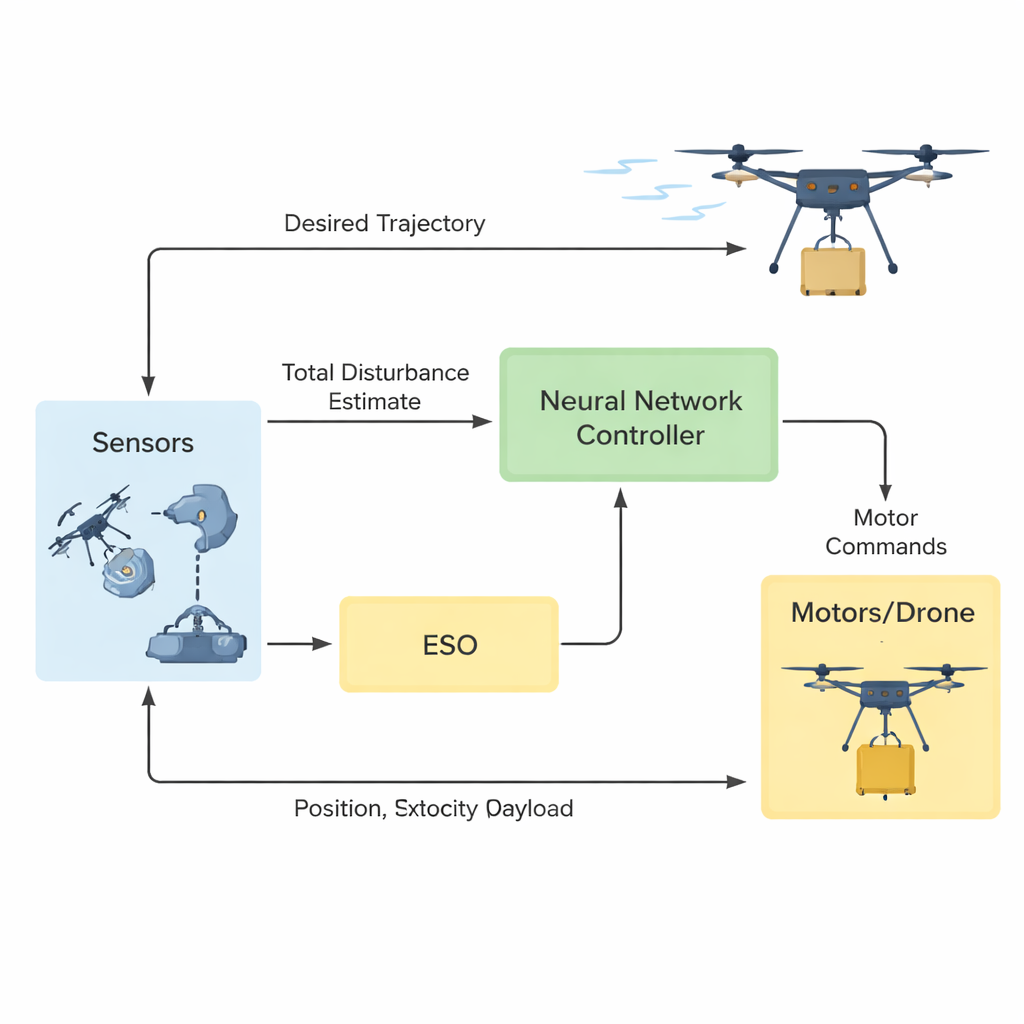
Para abordar esto, los autores se apoyan en un concepto llamado rechazo activo de perturbaciones. En lugar de intentar modelar cada detalle del viento y de la carga oscilante, tratan todas las influencias desconocidas en conjunto como una sola “perturbación agrupada”. Un observador de estado extendido especialmente diseñado actúa como un vigilante matemático, inferiendo constantemente esta perturbación total a partir del movimiento del dron. De forma notable, su observador se ajusta con un único parámetro principal, lo que simplifica mucho la puesta a punto en comparación con muchos diseños existentes. La teoría muestra que, con un ajuste adecuado, la estimación de la perturbación por parte del observador converge rápidamente y permanece fuertemente acotada, lo que significa que puede utilizarse como una corrección feedforward en tiempo real en lugar de una conjetura aproximada.
Permitir que una red neuronal aprenda las partes difíciles
Incluso con buenas estimaciones de la perturbación, el controlador aún necesita saber cómo los motores del dron traducen las órdenes en movimiento real —una relación que depende de la masa, la geometría y otros detalles físicos que pueden cambiar con el tiempo. En lugar de confiar en un modelo identificado minuciosamente, los autores introducen una red neuronal de funciones base radial que aprende esa relación directamente a partir de las señales de vuelo. El controlador solo necesita saber dónde está el dron, hacia dónde debe ir y la segunda derivada de la trayectoria deseada (qué tan rápido acelera el punto objetivo). Una ley adaptativa actualiza continuamente los pesos internos de la red neuronal para reducir los errores de seguimiento. Mediante un análisis basado en Lyapunov, los autores demuestran que bajo este esquema adaptativo los errores de seguimiento permanecen uniformemente acotados y pueden reducirse arbitrariamente, mientras que las actualizaciones de pesos se mantienen estables.
Poner el método a prueba
El equipo valida su enfoque mediante simulaciones por ordenador y experimentos en el mundo real. En las simulaciones, se pide al dron que siga trayectorias espirales tridimensionales desafiantes mientras recibe ráfagas de viento aleatorias y fuerzas de carga que cambian con el tiempo. El nuevo controlador se compara con tres métodos avanzados: rechazo activo de perturbaciones lineal, control por modo deslizante, control por modo deslizante terminal sin modelo y, en una prueba más exigente, control adaptativo de orden fraccionario. En múltiples escenarios, el método propuesto logra trayectorias más suaves y errores cuadráticos medios de posición menores, especialmente después de que se introducen perturbaciones. En las pruebas físicas, los investigadores hacen volar un quadrotor en interiores mientras dos ventiladores industriales soplan aire y una botella de agua de 200 gramos cuelga debajo. Cámaras de captura de movimiento registran la posición del dron. Incluso bajo viento continuo y tirones manuales de la carga, el dron mantiene su punto objetivo dentro de unos pocos centímetros y las órdenes a los motores se mantienen bien comportadas, lo que sugiere que el método es práctico para hardware real.
Qué significa esto para el uso cotidiano de drones
Para quienes no son especialistas, la conclusión principal es que este trabajo ofrece una forma de hacer los drones más fiables en condiciones adversas sin requerir un conocimiento perfecto de su física interna. Al combinar un observador de perturbaciones simple pero potente con un controlador basado en aprendizaje, el sistema puede adaptarse en vuelo a ráfagas de viento y cargas oscilantes, manteniendo el dron en curso con un esfuerzo mínimo de ajuste. Este tipo de control robusto y ligero en modelo podría facilitar el despliegue de drones para tareas rutinarias en ciudades, granjas y fábricas, y las mismas ideas podrían extenderse eventualmente a equipos de drones y a diseños tolerantes a fallos que sigan volando con seguridad incluso cuando algunos componentes fallen.
Cita: Cai, X., Dai, J., Liu, F. et al. ESO based adaptive neural network control for a quadrotor against wind and payload disturbances. Sci Rep 16, 7758 (2026). https://doi.org/10.1038/s41598-026-38931-8
Palabras clave: control de quadrotor, estabilidad de dron, perturbación por viento, controlador de red neuronal, seguimiento de carga útil