Clear Sky Science · es
El blanqueamiento PCA mejora la tolerancia a la iluminación para el reconocimiento visual de lugares con firmas de Fourier
Robots encontrando su camino en interiores
Imagínese un robot desplazándose por una casa u oficina que recibe luz solar intensa un día y lámparas tenues al siguiente. Para saber dónde está, el robot compara lo que su cámara ve ahora con imágenes que almacenó antes. Pero cuando la iluminación cambia drásticamente, los lugares pueden parecer casi irreconocibles. Este artículo explora una forma austera y basada en matemáticas para que los robots reconozcan lugares a partir de imágenes panorámicas, y muestra cómo un truco estadístico llamado blanqueamiento PCA hace que este método sea mucho más tolerante a los cambios de iluminación.
Ver el mundo como ondas, no como píxeles
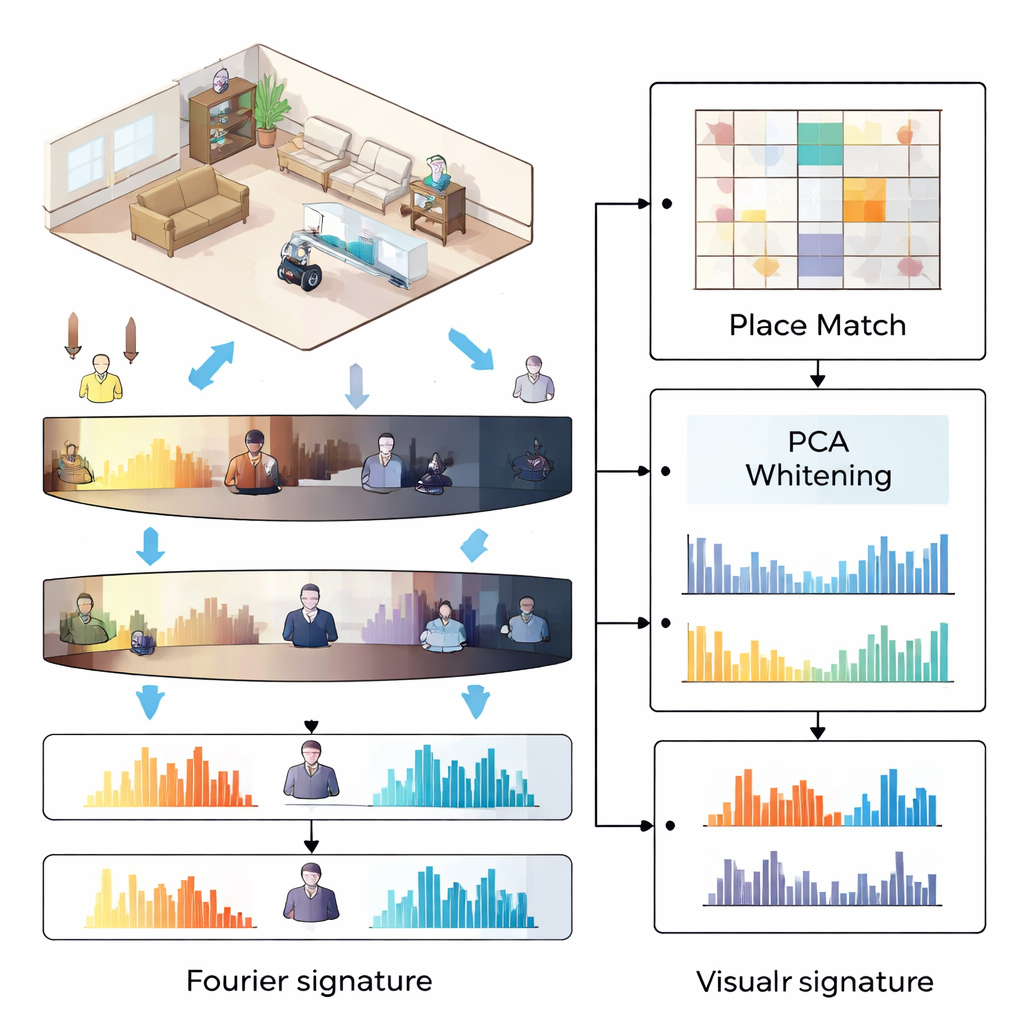
La mayoría de los sistemas modernos de reconocimiento visual de lugares usan muchos detalles pequeños en una imagen —bordes, esquinas y texturas— y luego los combinan en una “huella” compacta. En contraste, este trabajo se basa en las firmas de Fourier, que tratan una imagen panorámica no como una cuadrícula de píxeles sino como una mezcla de ondas de distintas frecuencias. La cámara captura una vista de 360 grados; esta panorámica se divide en bandas horizontales y cada banda se convierte en un espectro de frecuencia unidimensional. Solo se conservan las intensidades (amplitudes) de las frecuencias más bajas, que se apilan para formar un descriptor. Como el método descarta información sobre dónde aparecen las características a lo largo del círculo, el descriptor apenas cambia cuando el robot simplemente gira, lo que lo hace intrínsecamente robusto a la rotación.
Por qué la iluminación rompe las firmas simples
Aunque las firmas de Fourier son compactas y rápidas de calcular, siguen teniendo problemas cuando la iluminación cambia mucho entre las grabaciones del mismo lugar. Las imágenes naturales tienden a concentrar mucha más energía en las frecuencias bajas que en las altas, y este desequilibrio se ve afectado por la iluminación. Como resultado, algunas partes del descriptor dominan la medida de similitud, y muchas entradas están fuertemente correlacionadas entre sí porque las filas vecinas de la panorámica se parecen. Sin corrección, la decisión del sistema sobre si dos imágenes muestran el mismo lugar se basa en un pequeño subconjunto redundante de valores, lo que lo vuelve frágil ante condiciones de iluminación diferentes.
Limpiar la señal con blanqueamiento PCA
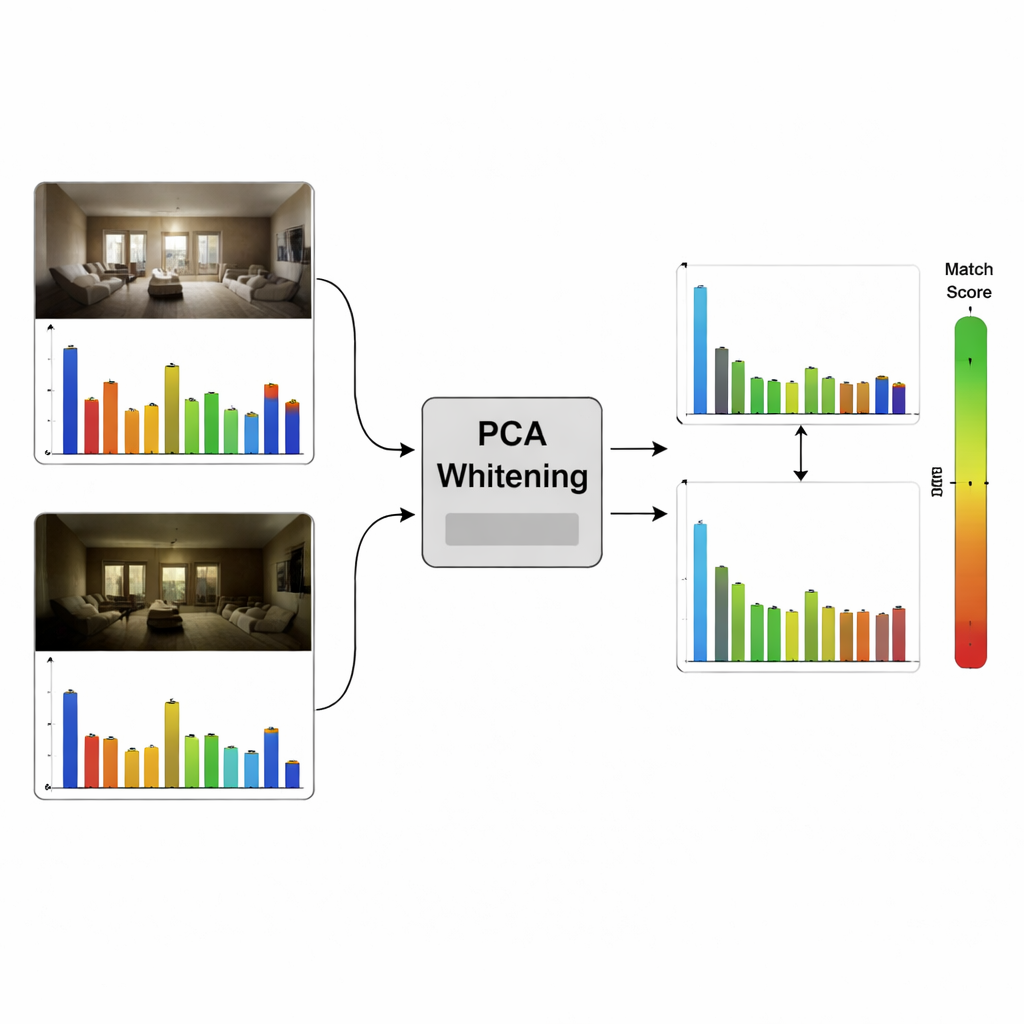
El autor propone añadir el blanqueamiento PCA como paso de posprocesado a los descriptores de Fourier. Usando una colección de panorámicas de entrenamiento de siete entornos interiores, el sistema aprende cómo tienden a variar y correlacionarse las entradas del descriptor. El blanqueamiento PCA recentra entonces el descriptor, lo rota hacia direcciones de variación independientes y reescala cada dirección para que todas tengan igual influencia. Esto elimina correlaciones redundantes y equilibra la contribución de distintas frecuencias. Como las entradas transformadas quedan ordenadas por importancia, el descriptor también puede acortarse de forma segura simplemente cortando la cola. Experimentos en tres entornos no vistos con múltiples variantes de iluminación muestran que el blanqueamiento incrementa de forma consistente la probabilidad de que el lugar correcto aparezca entre los mejores candidatos recuperados, especialmente en el caso práctico e importante de devolver solo una lista corta de coincidencias probables.
Ligero pero competitivo con el aprendizaje profundo
Para evaluar cómo se compara este enfoque simplificado con las tendencias actuales, el artículo lo contrasta con AnyLoc, un método reciente de reconocimiento visual de lugares basado en una red transformer de visión de gran tamaño. AnyLoc también usa compresión basada en PCA, pero parte de características de alta dimensión producidas por aprendizaje profundo. En el conjunto de datos panorámico de interiores, las firmas de Fourier blanqueadas igualan o incluso superan a AnyLoc cuando el sistema puede proponer hasta unas diez imágenes candidatas, que es un punto de operación realista para muchos robots. Lo crucial es que el método basado en Fourier es mucho más económico de ejecutar: se apoya en transformadas rápidas de Fourier y operaciones matriciales simples en CPU, mientras que AnyLoc necesita una GPU potente y mucho más tiempo por imagen.
Qué significa esto para los robots cotidianos
Para un lector no especializado, el mensaje central es que el uso inteligente de matemáticas clásicas aún puede rivalizar con la inteligencia artificial pesada en ciertas tareas. Al transformar imágenes panorámicas en descriptores balanceados y decorrelacionados, el blanqueamiento PCA hace que un método simple basado en frecuencias sea mucho más resistente a los cambios de iluminación. Los robots que usen este enfoque pueden localizarse de manera fiable en hogares y oficinas bajo una amplia gama de condiciones de iluminación, empleando recursos informáticos modestos. Esto hace que la navegación visual robusta sea más accesible para robots más pequeños y económicos que algún día podrían compartir nuestros espacios cotidianos.
Cita: Offermann, L. PCA whitening improves the illumination tolerance for visual place recognition with Fourier signatures. Sci Rep 16, 6148 (2026). https://doi.org/10.1038/s41598-026-38929-2
Palabras clave: reconocimiento visual de lugares, robots móviles, imagen panorámica, firmas de Fourier, blanqueamiento PCA