Clear Sky Science · es
Persecución pura mejorada con control de dirección dinámico para robots móviles autónomos y aplicación a la navegación segura en plantas químicas
Robots que se mantienen en la trayectoria
A medida que los robots salen de los pabellones limpios de las fábricas y se adentran en campos agrícolas y plantas químicas, deben seguir trayectos estrechos con gran precisión. Un pequeño bamboleo puede aplastar cultivos, golpear tuberías o rodar hacia un área donde hay gases inflamables. Este artículo describe una nueva forma para que robots con ruedas dirijan y controlen su velocidad de modo que puedan mantenerse cerca de una ruta planificada tanto en espacios abiertos como en entornos industriales reducidos.
Por qué es difícil guiar un robot
Muchos robots móviles autónomos actuales usan una regla simple llamada “pure pursuit” (persecución pura) para seguir una ruta. El robot mira una corta distancia adelante a lo largo del recorrido, apunta hacia ese punto y repite este proceso rápidamente. En la práctica, los ingenieros deben decidir cuánto adelante “mira” el robot y qué velocidad mantiene. Si la distancia de mirada es demasiado corta, el robot reacciona de forma nerviosa y puede zigzaguear. Si es demasiado larga, reacciona demasiado despacio y recorta curvas, especialmente en giros cerrados o a velocidades más altas. En exteriores surge otra complicación: la posición del robot se estima combinando señales satelitales, sensores de movimiento y datos de los codificadores de las ruedas, cada uno con sus propios errores y retardos.
Una forma más inteligente de dirigir y fijar la velocidad
Los autores proponen un método mejorado llamado Persecución Pura con Control Dinámico de Dirección (PP-DSC). En lugar de mantener fija la distancia de mirada y la velocidad, el robot ajusta ambos en tiempo real en función de la intensidad del giro. Cuando el ángulo de dirección es pequeño y la trayectoria está casi recta, el robot usa una mayor distancia de mirada y mayor velocidad para un desplazamiento suave y eficiente. A medida que el ángulo de dirección aumenta en las curvas, la distancia de mirada se reduce y la velocidad baja automáticamente, proporcionando al robot más tiempo para responder y reduciendo la deriva lateral. Este comportamiento se implementa en un robot de cuatro ruedas, similar a un coche, que utiliza un moderno marco de software robótico junto con posicionamiento satelital de alta precisión, un sensor inercial y codificadores de rueda para estimar su movimiento.

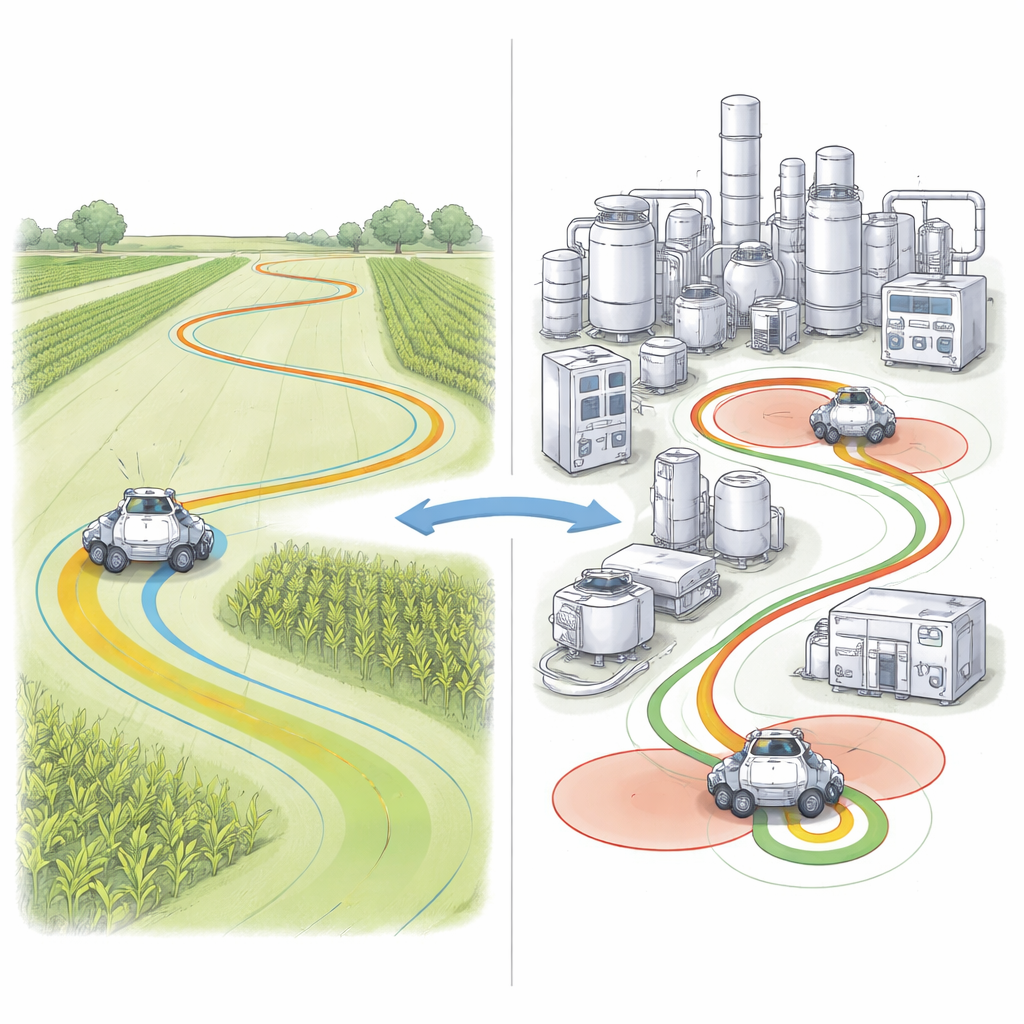
Pruebas en campos y plantas químicas virtuales
Para comprobar el rendimiento del PP-DSC, el equipo realizó experimentos al aire libre en tres trayectos básicos: una línea recta, un lazo y una figura en ocho, a velocidades de 1 a 5 metros por segundo. Compararon el método nuevo con el enfoque estándar de persecución pura. El controlador mejorado mantuvo al robot mucho más cerca de la ruta prevista en todos los casos. En líneas rectas, el error lateral medio se redujo a unos cinco centímetros, y en trayectos curvos el error se mantuvo por debajo de ocho centímetros. En contraste, el método tradicional podía desviarse varias decenas de centímetros y mostraba picos mayores al entrar o salir de curvas, especialmente a velocidades más altas.
Añadiendo seguridad en zonas de riesgo
Los investigadores también estudiaron cómo podría comportarse ese robot dentro de una planta química, donde podría encargársele inspeccionar reactores calientes o transportar muestras. En lugar de construir un banco de pruebas industrial completo, usaron un modelo informático detallado de una planta de biodiésel que incluía la posición del equipo y zonas con mayor riesgo de incendio y explosión. Extienden su controlador con un factor de seguridad que reduce automáticamente la velocidad del robot cuando este entra en esas zonas de peligro, basándose en un índice estándar de incendio y explosión utilizado en seguridad de procesos. Las simulaciones mostraron que esta versión de PP-DSC consciente de la seguridad solo incrementó ligeramente el error de seguimiento—menos de un por ciento en promedio—mientras garantizaba que el robot redujera su velocidad alrededor de equipos peligrosos.
Elegir la herramienta adecuada para cada tarea
Un hallazgo interesante es que no existe una única estrategia de dirección que sea la mejor en todo contexto. En campos abiertos con curvas suaves, el método dinámico superó claramente al enfoque tradicional, manteniendo la trayectoria del robot ajustada y suave incluso a velocidades más altas. Sin embargo, en la geometría estrecha de una planta química, la persecución pura simple con una distancia de mirada fija a veces funcionó mejor, especialmente en lazos cerrados y rutas autocruzadas en “figura en ocho” donde la mirada dinámica podía, accidentalmente, desplazar al robot hacia la rama equivocada de la trayectoria. Los autores concluyen que los robots deberían alternar entre estrategias según la forma de la ruta: usar el controlador mejorado e integrado con seguridad para curvas moderadas y desplazamientos con conciencia de riesgos, y recurrir a un esquema de distancia fija para trayectos muy cerrados o con bucles. Para los no expertos, el mensaje clave es que la navegación robótica segura y fiable en plantas y campos reales no depende solo de buenos mapas y sensores: la forma en que el robot elige dónde mirar y a qué velocidad ir es igual de importante.
Cita: Promkaew, N., Junhuathon, N., Phuphaphud, A. et al. Enhanced pure pursuit with dynamic steering control for autonomous mobile robots and application to safe navigation in chemical plants. Sci Rep 16, 8820 (2026). https://doi.org/10.1038/s41598-026-38695-1
Palabras clave: robots móviles autónomos, seguimiento de trayectoria, control de dirección, navegación GNSS-RTK, seguridad en plantas químicas