Clear Sky Science · es
Detección ligera de objetivos y seguimiento múltiple para inspección con UAV en minas a cielo abierto
Ojos más inteligentes en el cielo
Las minas a cielo abierto son lugares extensos y hostiles donde camiones pesados, excavadoras y personas se desplazan constantemente. Mantener todo seguro y en funcionamiento normalmente requiere muchos trabajadores en tierra y costosos equipos de posicionamiento, pero aún así pueden escaparse pequeñas fallas e intrusos. Este artículo explora cómo drones inteligentes y ligeros pueden patrullar estas minas desde arriba, detectando automáticamente en tiempo real equipos, personas y problemas mientras operan dentro de los estrictos límites de cómputo de la electrónica a bordo.
Por qué las minas necesitan mejores vigilantes
Las minas modernas ya dependen de herramientas como el posicionamiento por satélite y balizas de radio especiales para rastrear camiones y máquinas. Pero estos sistemas “activos” tienen puntos ciegos: las señales pueden bloquearse por paredes empinadas, polvo o interferencias, y solo funcionan con vehículos y personas que lleven los dispositivos adecuados. Tampoco permiten ver cómo es realmente una falla. Los drones, en cambio, pueden sobrevolar terrenos difíciles, capturar imágenes y vídeo ricos, y seguir objetivos no cooperativos, como vehículos que entran sin permiso. El desafío es que los algoritmos de visión potentes normalmente requieren ordenadores pesados, mientras que los drones tienen limitaciones de peso, energía y capacidad de procesamiento. Los autores se propusieron diseñar un sistema de detección y seguimiento que sea preciso y lo suficientemente ligero como para ejecutarse directamente en un dron.
Enseñar a los drones a ver objetivos pequeños y ocultos
El núcleo del trabajo es una versión mejorada de un modelo de visión popular llamado YOLO, ajustada específicamente para minas a cielo abierto. Los investigadores reconfiguran la “columna vertebral” del modelo para que siga los contornos irregulares de camiones, excavadoras y pilas de roca, en lugar de depender de filtros rígidos en forma de rejilla. También rediseñan la parte de la red que combina información de escalas de imagen gruesas y finas, de modo que máquinas pequeñas y lejanas y otras más grandes y cercanas se capturen juntas sin confundirse. Además, un nuevo módulo de decisión ligero centra la atención en los detalles más informativos de la escena, ayudando al sistema a distinguir pequeños puntos de fallo y máquinas parcialmente ocultas del fondo abarrotado.
Hacer que modelos potentes quepan en un dron
Incluso con estas mejoras, un modelo de visión puede crecer fácilmente hasta exceder el hardware del dron. Para resolverlo, el equipo aplica una estrategia de poda cuidadosa que analiza qué conexiones internas contribuyen más al rendimiento y luego recorta el resto. Este proceso reduce el número de parámetros y la cantidad de cálculo preservando las rutas más fuertes en la red. En un nivel óptimo de poda, el sistema mantiene una alta precisión de detección y, al mismo tiempo, reduce el tamaño del modelo, las operaciones y el tiempo de respuesta lo suficiente como para ejecutarse en un procesador embebido compacto, consumiendo menos energía y extendiendo el tiempo de vuelo. Las pruebas en un conjunto de datos minero personalizado y en un benchmark público de drones muestran que el modelo podado supera a varias alternativas conocidas, especialmente para objetivos pequeños y parcialmente ocultos.
De instantáneas a trayectorias suaves
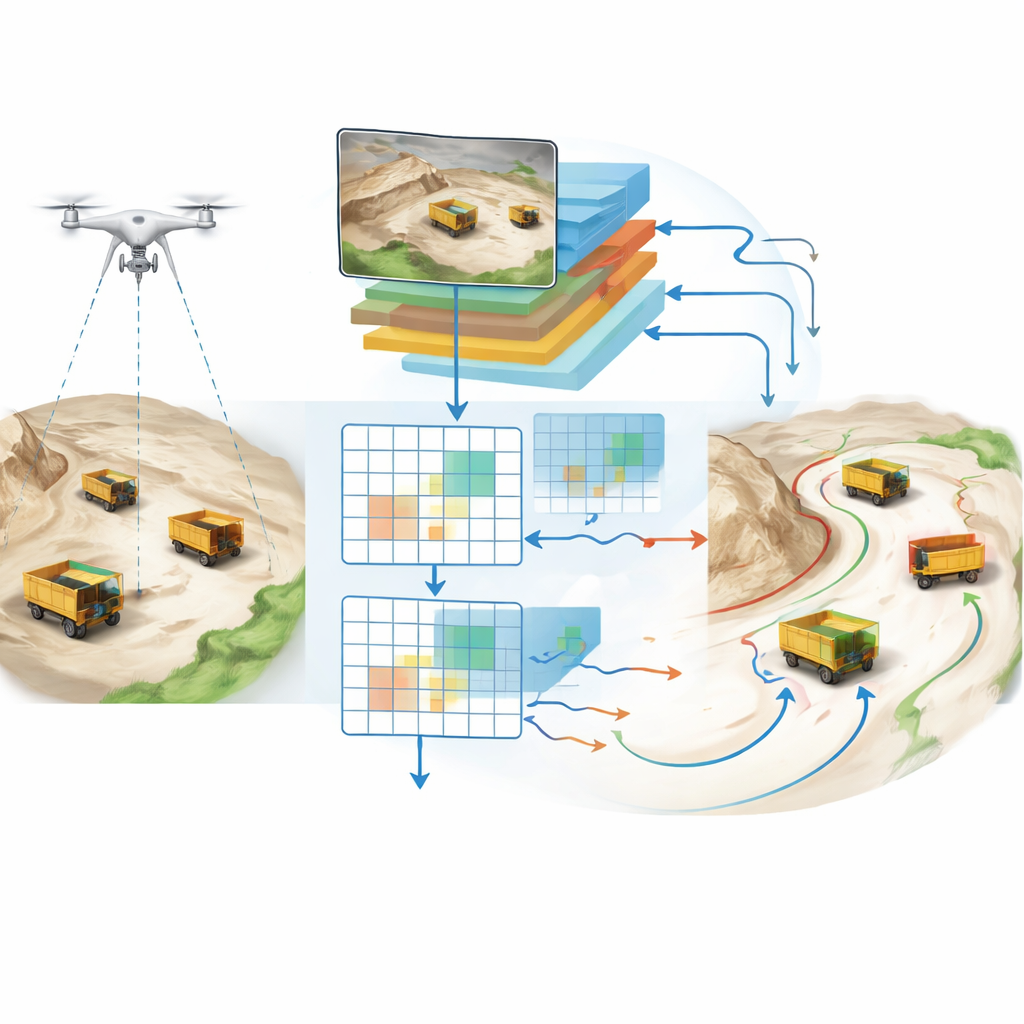
Detectar objetos en una imagen es solo la mitad de la historia; las minas también necesitan saber cómo se mueve cada camión o persona a lo largo del tiempo. Para ello, los autores mejoran un enfoque de seguimiento multiobjetivo existente para que maneje mejor escenas concurridas, vehículos parecidos y cambios bruscos en el movimiento. Crean una medida de similitud combinada que considera dónde está un objetivo, cómo se ve e incluso si aparece cargado o vacío. También corrigen las predicciones de movimiento para tener en cuenta la aceleración cambiante, por ejemplo cuando un camión gira o sube una pendiente. Juntas, estas medidas reducen los intercambios de identidad —cuando un vehículo se confunde con otro— y mantienen las trayectorias suaves y fiables, todo ello manteniendo la velocidad necesaria para uso en tiempo real en hardware de calidad para drones.
Hacia patrullas mineras no tripuladas y siempre activas
Finalmente, los autores integran sus módulos de visión y seguimiento dentro de un sistema de inspección multinivel que puede coordinar varios drones, transmitir datos por 5G y enlaces ad-hoc, y enviar resultados al control en tierra. En experimentos sobre minas reales, esta configuración mejora notablemente la precisión y estabilidad del monitoreo de equipos en comparación con métodos tradicionales. Para el público no especializado, la conclusión clave es que el estudio muestra una ruta práctica para que robots voladores pequeños y eficientes vigilen continuamente grandes instalaciones industriales, detectando fallas pequeñas, visitantes no registrados y situaciones de riesgo antes de que escalen —sin necesidad de ordenadores voluminosos ni de redes densas de balizas en cada vehículo.
Cita: Liu, G., Zhang, L., Lei, J. et al. Lightweight target detection and multi target tracking for UAV inspection in open pit mines. Sci Rep 16, 8084 (2026). https://doi.org/10.1038/s41598-026-38676-4
Palabras clave: inspección con drones, minería a cielo abierto, detección de objetos, seguimiento multiobjetivo, modelos de IA ligeros