Clear Sky Science · es
Una interfaz cerebro-máquina intracortical basada en la actividad del premotor ventral de macaco
Enseñar al cerebro a mover un cursor
Imagínese guiar un cursor de ordenador o un brazo robótico usando solo sus pensamientos, incluso si sus músculos ya no pueden moverse. Las interfaces cerebro–máquina (ICM) buscan hacer eso posible traduciendo la actividad cerebral en comandos para dispositivos externos. La mayoría de los sistemas hasta ahora han tomado señales de una zona principal del movimiento en el cerebro, pero ¿qué ocurre si esa región está dañada, como en un accidente cerebrovascular o en la ELA? Este estudio plantea si otra área vecina, normalmente asociada a la planificación de acciones manuales y a la observación de movimientos ajenos, también puede impulsar de forma fiable una ICM.
Una nueva área cerebral se incorpora al equipo
Las ICM clásicas leen principalmente señales de la corteza motora primaria, la franja de tejido cerebral que controla directamente los movimientos voluntarios, y de una región vecina de planificación llamada corteza premotora dorsal. Los investigadores dirigieron su atención a otra vecina: la corteza premotora ventral, concretamente una zona llamada F5c. En monos, F5c contiene muchas neuronas que disparan cuando el animal alcanza y agarra objetos e incluso cuando simplemente observa acciones en una pantalla. Esa mezcla de respuestas asociadas al movimiento y a la observación sugería que F5c podría ser adecuada para controlar un cursor o un “avatar” robótico sin requerir el movimiento del cuerpo.
Monos, microelectrodos y objetivos en movimiento
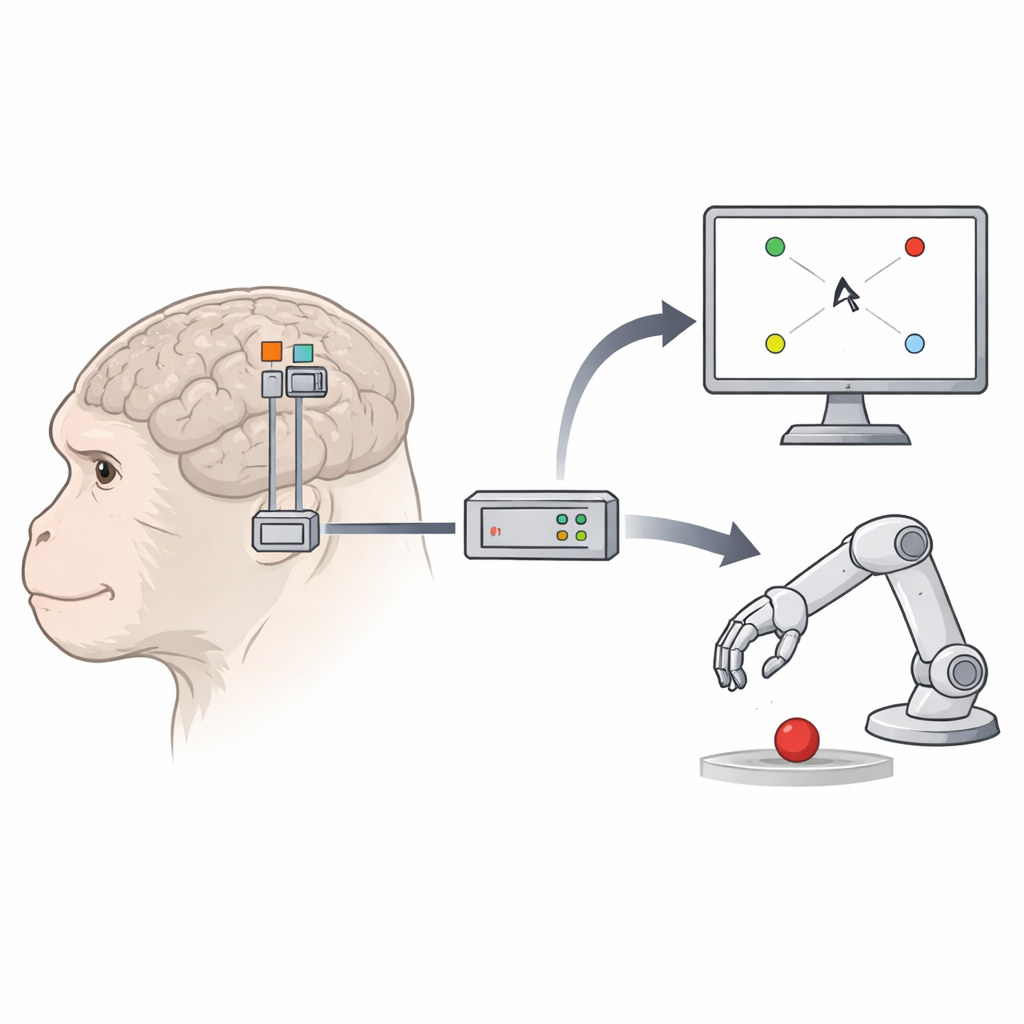
Se implantó a dos macacos pequeñas rejillas de 96 electrodos en tres lugares: la corteza motora primaria, la corteza premotora dorsal y F5c. En sesiones diarias, los animales realizaron varias tareas visualmente simples pero exigentes a nivel conductual. En una tarea, tocaban el centro de una pantalla y luego alcanzaban uno de ocho objetivos exteriores, mientras un pequeño cursor en pantalla se movía del centro al mismo objetivo. En una segunda tarea, mantenían la mano quieta y solo observaban el cursor desplazarse hacia los objetivos. En una tercera configuración, más realista, el cursor fue reemplazado por un brazo robótico 3D avatar que alcanzaba objetivos en una escena virtual. A lo largo de estas tareas, el equipo pudo comparar qué tan bien cada área cerebral dirigía el movimiento del cursor o del avatar.
Cómo las señales cerebrales se convirtieron en movimiento suave
Durante una fase de entrenamiento, el cursor o el avatar seguían trayectorias generadas por ordenador, suavemente curvas, mientras los monos se movían o miraban. Al mismo tiempo, los electrodos registraban ráfagas rápidas de actividad cerebral. Los investigadores entrenaron entonces un decodificador, una herramienta matemática que aprende a mapear patrones de disparo neuronal a las velocidades del cursor o del avatar en pantalla. Para capturar solo los canales más informativos, eligieron electrodos cuya actividad seguía la dirección y la velocidad del movimiento. Usaron un método que aísla los patrones cerebrales más estrechamente ligados al comportamiento y lo mejoraron con un paso no lineal, lo que permitió al sistema captar relaciones más complejas entre la actividad neural y el movimiento. En la fase de decodificación, el ordenador dejó de conducir el cursor o el avatar; en su lugar, el decodificador utilizó señales cerebrales en vivo, actualizadas cada 50 milisegundos, para dirigir el movimiento en pantalla. El decodificador se reentrenaba periódicamente en segundo plano para adaptarse a los cambios en las respuestas neuronales a lo largo del tiempo.

¿Qué tan bien funcionó la área “nueva”?
La pregunta clave era si F5c podía igualar o acercarse al rendimiento de las áreas de control tradicionales. En ambos monos, la decodificación basada en F5c inicialmente fue más lenta al mover el cursor, especialmente cuando los animales solo miraban y no movían su propia mano. Pero conforme avanzaron las sesiones—y más electrodos proporcionaron señales fiables relacionadas con el movimiento—F5c alcanzó a las otras áreas. En varias condiciones, su rendimiento igualó al de la corteza motora primaria e incluso la superó en sesiones posteriores para el control pasivo del cursor. Al controlar el avatar robótico, el éxito global fue menor en todas las áreas, pero F5c todavía permitió un control significativo, especialmente cuando se combinó con un algoritmo edificante suave que guiaba sutilmente el avatar hacia el objetivo. Es importante señalar que las neuronas en las tres regiones mostraron patrones similares de afinamiento direccional y actividad poblacional durante la fase de entrenamiento conducida por ordenador y la fase de control activo, con solo un subconjunto cambiando sus direcciones preferidas a medida que los monos aprendían a manejar la ICM.
Qué implica esto para la neurotecnología futura
Para un público no especialista, la conclusión crucial es que el área premotora ventral F5c—antes considerada sobre todo como una región de planificación y observación de acciones—también puede funcionar como un centro práctico de control para interfaces cerebro–máquina. Cuando hay suficientes señales relacionadas con el movimiento, los decodificadores entrenados con la actividad de F5c pueden guiar un cursor en pantalla o un robot asistente casi tan bien como los basados en la zona motora clásica. Esto sugiere que las ICM clínicas futuras no tendrían que depender de una única región cortical. Para personas cuya corteza motora primaria esté dañada, regiones de planificación cercanas como la corteza premotora ventral podrían ofrecer una vía alternativa para recuperar el control de herramientas digitales, dispositivos protésicos o ayudas a la movilidad.
Cita: De Schrijver, S., Garcia Ramirez, J., Iregui, S. et al. An intracortical brain-machine interface based on macaque ventral premotor activity. Sci Rep 16, 8407 (2026). https://doi.org/10.1038/s41598-026-38536-1
Palabras clave: interfaz cerebro-máquina, corteza motora, corteza premotora, decodificación neural, control protésico