Clear Sky Science · es
Un sistema difuso tipo 3 basado en estructura virtual para detección predictiva de fallos en sensores y actuadores, compensación y control en sistemas no lineales
Mantener las máquinas en marcha cuando las piezas fallan
Las tecnologías modernas —desde brazos robóticos en plantas industriales hasta instalaciones químicas que regulan la acidez— dependen de sensores y actuadores que, de manera discreta, mantienen todo funcionando. Pero cuando estas piezas derivan, se quedan atascadas o fallan, un sistema puede volverse inseguro mucho antes de que alguien lo detecte. Este artículo presenta una nueva forma de permitir que las máquinas detecten y corrijan tales problemas por sí mismas, incluso cuando los ingenieros no disponen de un modelo matemático preciso del comportamiento interno del sistema.
Por qué los problemas ocultos son tan difíciles de detectar
En muchos entornos reales, el comportamiento de un sistema es altamente no lineal: cambios pequeños en la entrada pueden provocar oscilaciones grandes e inesperadas en la salida. Los métodos de control tradicionales asumen que los diseñadores conocen las ecuaciones que rigen ese comportamiento y que los sensores y actuadores funcionan en su mayor parte como se espera. En la práctica, los componentes envejecen, se vuelven ruidosos o se reemplazan por hardware ligeramente distinto. Los controladores tolerantes a fallos convencionales o bien incorporan márgenes de seguridad fijos (métodos pasivos) o dependen de modelos precisos para detectar y acomodar fallos (métodos activos). Ambos enfoques tienen dificultades cuando el sistema cambia con el tiempo o cuando su funcionamiento interno no es totalmente conocido. Los autores sostienen que la industria necesita controladores que aprendan de datos en tiempo real, reconozcan cuándo sensores o actuadores se comportan mal y corrijan esos fallos en tiempo real sin requerir un plano detallado del sistema.
Un controlador que aprende y trata el sistema como una caja negra
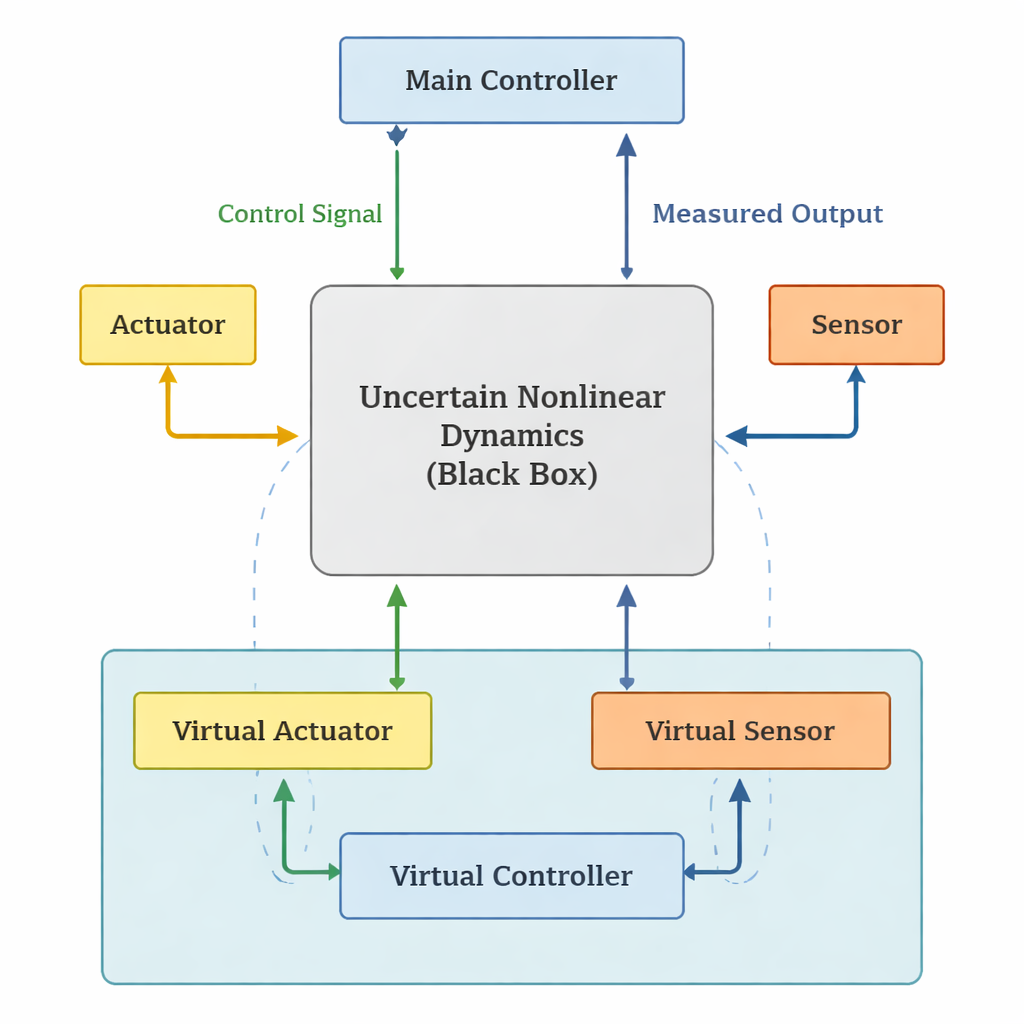
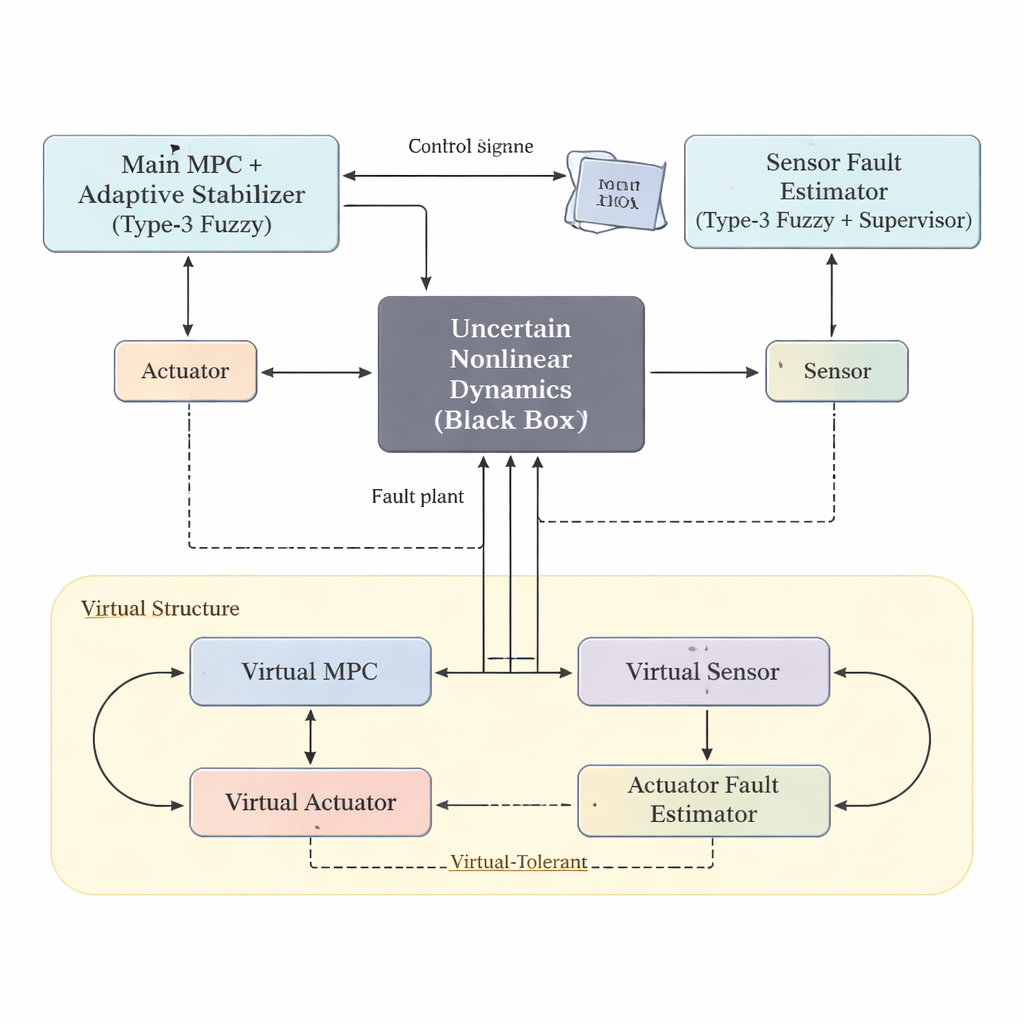
El marco propuesto contempla la planta puramente como una caja negra: solo observa las señales de control enviadas y las salidas medidas por los sensores. En su núcleo hay un sistema de lógica difusa tipo 3, una forma avanzada de modelado difuso diseñada para manejar incertidumbre fuerte y ruido de medición. Este sistema difuso aprende en línea una descripción compacta de entrada–salida de la dinámica desconocida, mientras que un controlador predictivo basado en modelo (MPC) utiliza ese modelo aprendido para planificar movimientos de control futuros en un horizonte corto. Una unidad estabilizadora adaptativa opera en paralelo, garantizando que, incluso si el modelo es imperfecto o los parámetros derivan, la realimentación combinada mantenga los errores de seguimiento acotados y eventualmente los lleve hacia cero.
Vigilando a los vigilantes: detección de fallos en sensores y actuadores
El marco divide el manejo de fallos en dos partes coordinadas. Primero, una unidad de fallo de sensor usa dos estimadores difusos tipo 3 adicionales junto con un bloque supervisor para inferir cuánto se ha desviado una lectura de sensor de su valor esperado en estado estacionario. A partir de esto genera una señal correctiva que efectivamente “contraendereza” la medición defectuosa para que el controlador principal siga viendo una salida fiable. En segundo lugar, el método construye una estructura virtual que refleja el sistema real: incluye un sensor virtual, un actuador virtual, su propio identificador difuso y un MPC virtual. Debido a que el lazo virtual no sufre la degradación del actuador real, las diferencias entre las rutas de control virtual y real revelan qué tan mal está fallando el actuador verdadero. Una fórmula sencilla convierte esa brecha en un nivel de fallo estimado, que luego se compensa en la señal de control principal.
Demostrando estabilidad y pruebas en robots y tanques químicos
Para mostrar que el enfoque no es solo intuitivo sino matemáticamente sólido, los autores construyen una función de Lyapunov —una especie de medida de energía— que incluye errores de seguimiento, errores de modelado y los parámetros difusos ajustables. Derivan leyes de actualización para los términos adaptativos de modo que esta energía siempre decrezca, demostrando que los errores se reducen con el tiempo incluso con perturbaciones y fallos. Las simulaciones prueban luego el método en dos ejemplos muy diferentes: un brazo robótico de un solo eslabón y un proceso de neutralización de pH en un tanque químico. En ambos casos, las dinámicas reales se tratan como completamente desconocidas, los parámetros varían y se inyectan fallos tanto en sensores como en actuadores durante la operación. El controlador mantiene un seguimiento preciso, aprende rápidamente la magnitud de los fallos y mantiene bajas las medidas de riesgo y error, superando a controladores difusos más simples y otros esquemas tolerantes a fallos avanzados de la literatura.
Qué significa esto para los sistemas reales
Para los no especialistas, el mensaje clave es que este método proporciona a los sistemas complejos una especie de autoconciencia integrada. En lugar de depender de un modelo perfecto o de reajustes manuales por parte de ingenieros, el controlador aprende continuamente de los datos que observa, detecta cuando sensores o actuadores empiezan a fallar o perder eficacia y corrige automáticamente sus acciones para mantener el rendimiento estable. Al necesitar solo datos de entrada y salida, puede, en principio, aplicarse a muchas máquinas distintas sin rediseñar todo desde cero. Aunque los resultados se basan en simulaciones y todavía hay que explorar cuestiones prácticas de hardware, el trabajo apunta hacia robots más resilientes, procesos industriales y otros sistemas autónomos que siguen siendo fiables incluso cuando sus componentes y entornos están lejos de ser ideales.
Cita: Hong, X., Zhakiyev, N., Yedilkhan, D. et al. A virtual-structure-based type-3 fuzzy system for predictive sensor and actuator fault detection, compensation, and control in nonlinear systems. Sci Rep 16, 7153 (2026). https://doi.org/10.1038/s41598-026-38456-0
Palabras clave: control tolerante a fallos, lógica difusa, control predictivo basado en modelo, fallos en sensores y actuadores, sistemas no lineales