Clear Sky Science · es
Investigación sobre método de posicionamiento en clasificación de paquetes en logística desordenada
Por qué importa una clasificación de paquetes más inteligente
Cada pedido en línea que haces desencadena un ballet oculto de cajas en enormes centros logísticos. Antes de que un paquete pueda encaminarse rápidamente hacia tu puerta, debe ser localizado, recogido, medido, escaneado y direccionado, a menudo desde un montón caótico de paquetes mezclados. Hoy, gran parte de esa primera fase de “deshacer el caos” sigue dependiendo de trabajadores humanos que realizan tareas repetitivas y agotadoras. Este artículo presenta un nuevo método basado en visión que ayuda a los robots a encontrar con fiabilidad dónde agarrar cada paquete en un revoltijo, acercando un paso más la clasificación totalmente automatizada, más rápida y menos dependiente del trabajo humano.
De montones desordenados a datos compatibles con robots
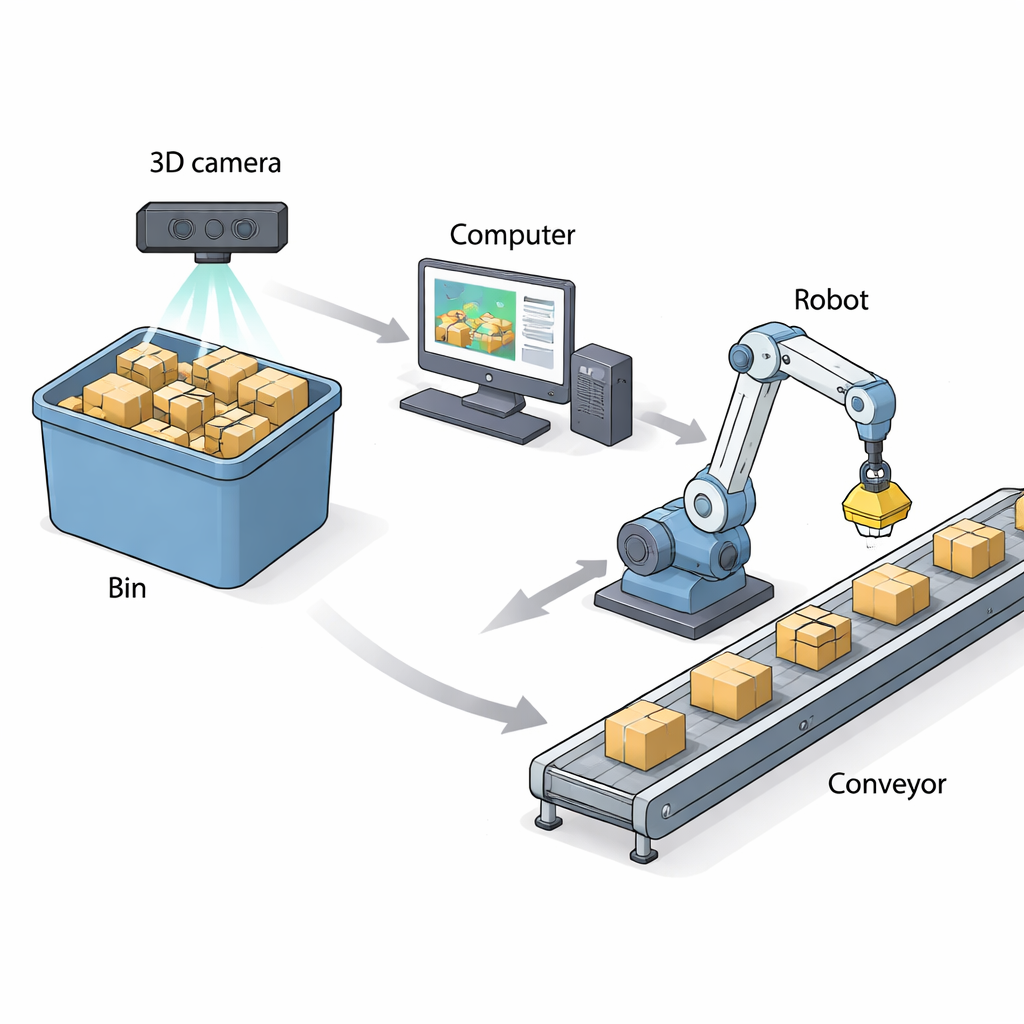
Los investigadores se centran en lo que denominan paquetes de logística “desordenada”: cajas y sobres flexibles cotidianos tirados en contenedores sin orden, a veces aplastados o doblados por apilamiento. Para sustituir a los operarios humanos en este entorno desordenado, un robot necesita primero saber exactamente dónde alcanzar y cómo orientar su pinza sobre la superficie del paquete objetivo. El equipo construye un sistema alrededor de una cámara 3D que captura tanto una imagen en color como un mapa de profundidad de la capa superior de paquetes. Una red de reconocimiento moderna (basada en YOLOv8) detecta paquetes individuales en la imagen en color, mientras que el mapa de profundidad revela su forma tridimensional. Esta combinación permite al ordenador seleccionar el mejor paquete para agarrar a continuación —uno que no esté demasiado oculto y que esté suficientemente alejado de los bordes del contenedor— antes de calcular un punto de agarre preciso.
Encontrar un punto de agarre estable con tres puntos y una sombra
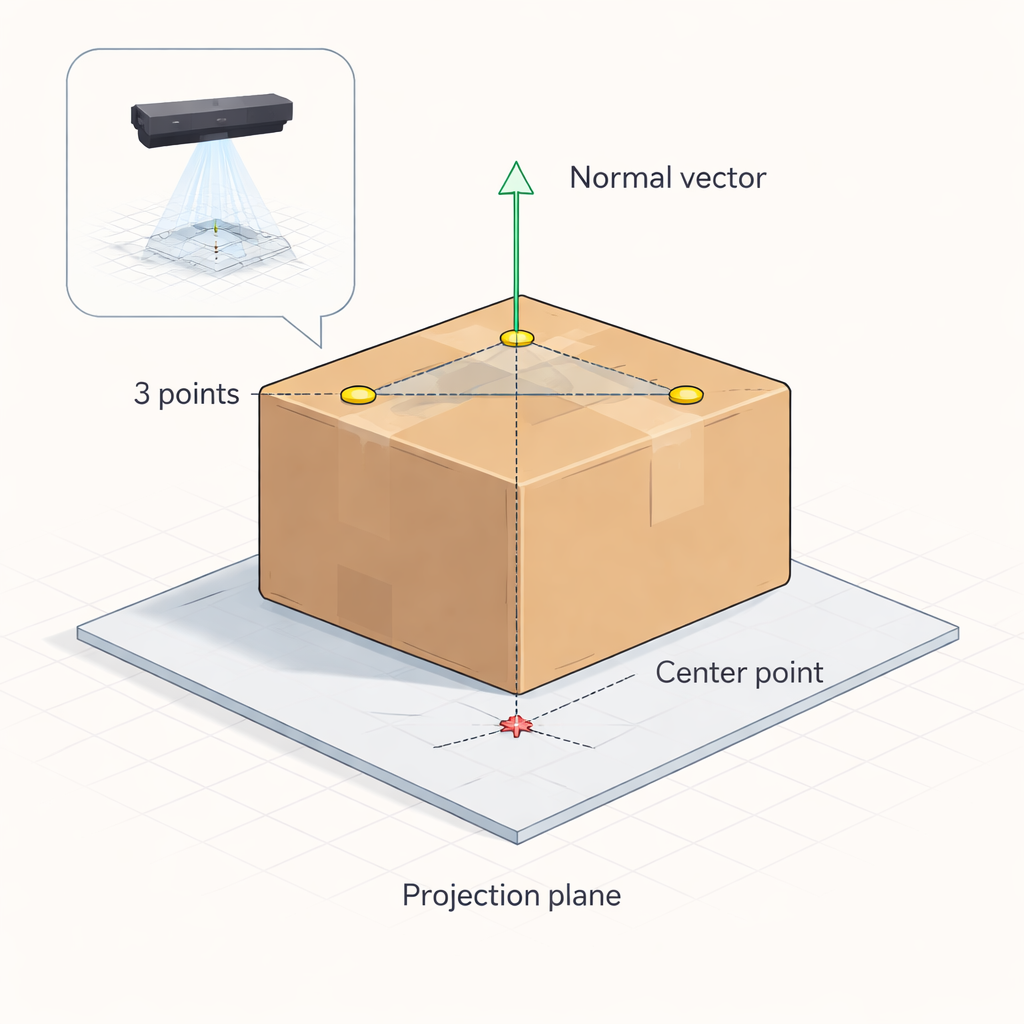
En el núcleo del método hay un truco geométrico que los autores llaman algoritmo de centrado por proyección y orientación mediante tres puntos. Una vez elegido un paquete objetivo, el sistema selecciona aleatoriamente tres puntos en su superficie superior a partir de los datos de profundidad. Esos tres puntos definen un plano, del mismo modo que tres clavijas sobre una mesa definen la inclinación de la misma. A partir de ese plano, el algoritmo calcula una dirección “normal”: una línea recta perpendicular a la superficie del paquete. En paralelo, el sistema usa las cuatro esquinas superiores del paquete en la imagen para inferir el centro geométrico de su contorno proyectado, similar a encontrar el centro de la sombra de un rectángulo. La combinación de la orientación del plano con esta posición central produce una ubicación de agarre 3D precisa y la inclinación de la superficie superior del paquete, que puede orientar la copa de succión o la pinza del robot.
Tratamiento de paquetes aplastados y abultados
Los paquetes reales no son bloques perfectos: los sobres con burbuja se hunden, las bolsas blandas se abultan y las cajas de cartón pueden deformarse bajo carga. Una suposición simple de superficie plana fallaría en esos casos. Para abordarlo, los autores amplían sus cálculos para distinguir entre tres situaciones: paquetes casi planos, superficies superiores convexas (abultadas) y superficies cóncavas (hundidas). Comparando los valores de profundidad más altos y más bajos en la superficie de un paquete, el sistema decide primero si está significativamente deformado. Si es así, analiza cómo la superficie deformada intersecta con un plano de referencia imaginario y ajusta una elipse aproximada a esa intersección. A partir de ello, resuelve un plano “óptimo” que mejor represente una superficie de agarre estable —incluso si la parte superior real se hunde o abulta— y proyecta el punto de agarre clave de vuelta sobre ese plano.
Poniendo el algoritmo a prueba
Para comprobar si las ecuaciones funcionan en la práctica, el equipo construyó un banco de pruebas con un robot industrial de seis ejes, una cámara 3D y un dispositivo personalizado de láser y sonda. Primero, marcaron el verdadero centro geométrico de la superficie superior de cada paquete de prueba y usaron dos haces láser para localizar físicamente esa posición en el espacio. A continuación, dejaron que su algoritmo de visión calculase su propia estimación del mismo centro y mandaron al robot a mover una segunda sonda hasta ese punto calculado. Midiendo el pequeño desplazamiento entre las puntas de las dos sondas, pudieron calcular el error de posicionamiento. Las pruebas con modelos rígidos de madera y materiales de embalaje realistas —cartones corrugados, sobres con burbuja y bolsas de plástico, en tamaños de hasta 250×250 mm— mostraron un error máximo de posicionamiento de aproximadamente 1,7 milímetros y errores medios cercanos a 1 milímetro por eje. El cálculo completo para cada paquete tardó unos 17,5 milisegundos, lo bastante rápido para líneas de clasificación de alto rendimiento.
Qué significa esto para los almacenes del futuro
En términos sencillos, el estudio demuestra que un robot equipado con una cámara 3D y este algoritmo de tres puntos basado en proyección puede determinar con fiabilidad dónde y cómo agarrar paquetes desde un contenedor desordenado con precisión de nivel milimétrico. Aunque las deformaciones muy pronunciadas en paquetes muy blandos reducen algo la exactitud, el método sigue siendo lo suficientemente robusto para condiciones realistas de almacén. A medida que los volúmenes de paquetería siguen aumentando y persisten las carencias de mano de obra, algoritmos como este podrían permitir un trabajo más seguro y menos monótono al desplazar las tareas más pesadas y repetitivas de las personas a las máquinas, a la vez que ayudan a mantener el crecimiento del comercio electrónico funcionando sin contratiempos.
Cita: Han, Y., Zhang, F., He, A. et al. Research on positioning method in parcel sorting in disordered logistics. Sci Rep 16, 7524 (2026). https://doi.org/10.1038/s41598-026-38092-8
Palabras clave: visión 3D, clasificación de paquetes, agarre robótico, automatización logística, localización de objetos