Clear Sky Science · es
Integración de un Swin-T simplificado con EFS-Net modificado para segmentación de tuberías submarinas guiada por atención en entornos marinos complejos
Por qué importa observar el lecho marino
Ocultas bajo las olas, vastas redes de tuberías transportan petróleo, gas y cables eléctricos de los que dependen las sociedades modernas. Si estas tuberías submarinas se agrietan, corroden o se desplazan, el resultado puede ser costosos paros y una contaminación severa. Hoy, gran parte del trabajo de inspección lo realizan operadores humanos que revisan horas de vídeo turbio de robots submarinos. Este artículo presenta un nuevo sistema de inteligencia artificial (IA) que puede identificar automáticamente las tuberías en imágenes subacuáticas difíciles, incluso cuando están tenues, cubiertas por "nieve marina" o parcialmente enterradas en la arena. Ese avance hacia una inspección automatizada y confiable podría hacer que la energía y la infraestructura costa afuera sean más seguras y económicas de mantener.
Ver con claridad en un mundo turbio
La imaginería submarina es notoriamente difícil de interpretar para los ordenadores. La luz se atenúa rápidamente con la profundidad, los colores derivan hacia el verde y el azul, y las partículas flotantes generan neblina y motas similares a la nieve. Las técnicas clásicas de imagen, que dependen de bordes nítidos y contraste limpio, tienden a fallar cuando la tubería está cubierta de arena, oculta por vegetación o difuminada por niebla. El aprendizaje profundo ha mejorado la situación, y varias redes neuronales populares ya pueden detectar tuberías en conjuntos de datos específicos. Sin embargo, esos sistemas suelen especializarse en un tipo de condición de agua o configuración de cámara. Cuando se enfrentan a un entorno nuevo—agua, iluminación o fondo distintos—su precisión cae bruscamente. El desafío central es construir un modelo que sea a la vez preciso y adaptable, y al mismo tiempo lo suficientemente eficiente para funcionar en sistemas de inspección del mundo real.
Un enfoque de dos cerebros para imágenes submarinas
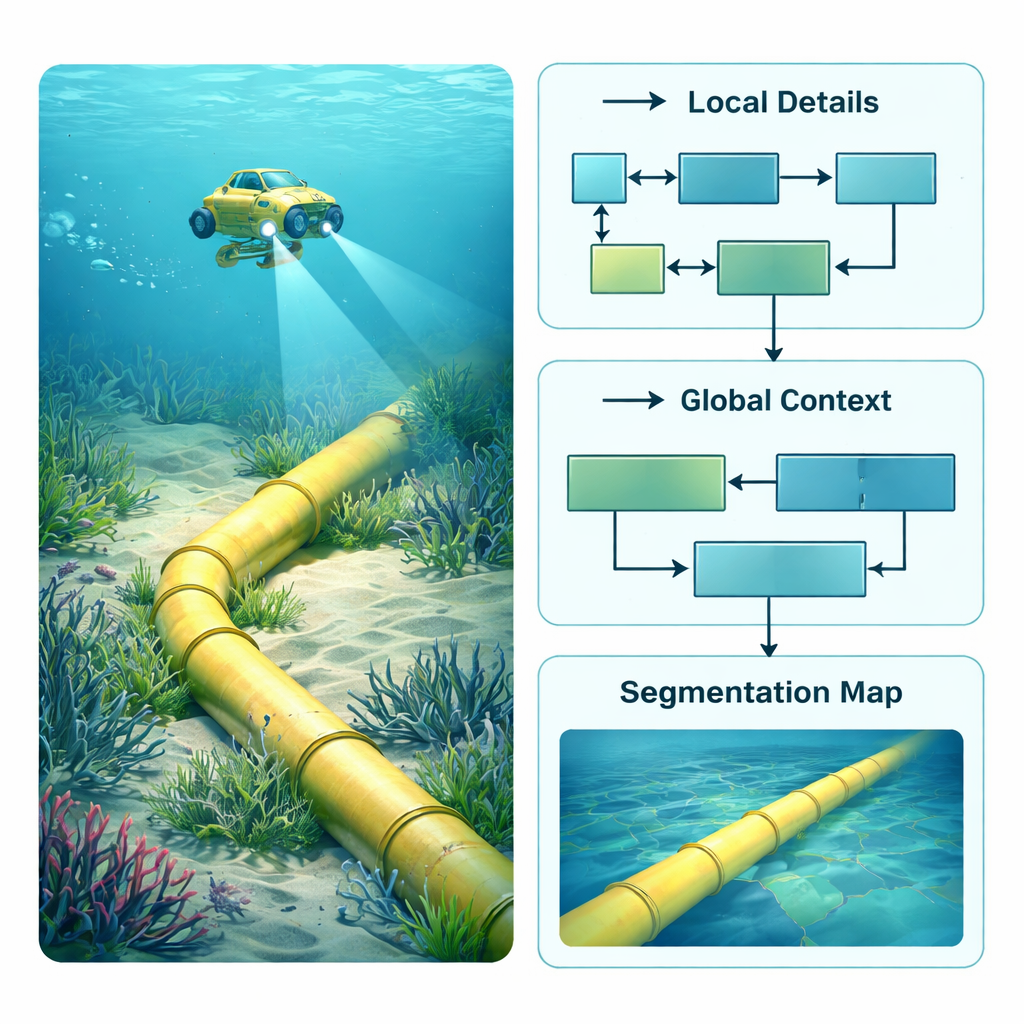
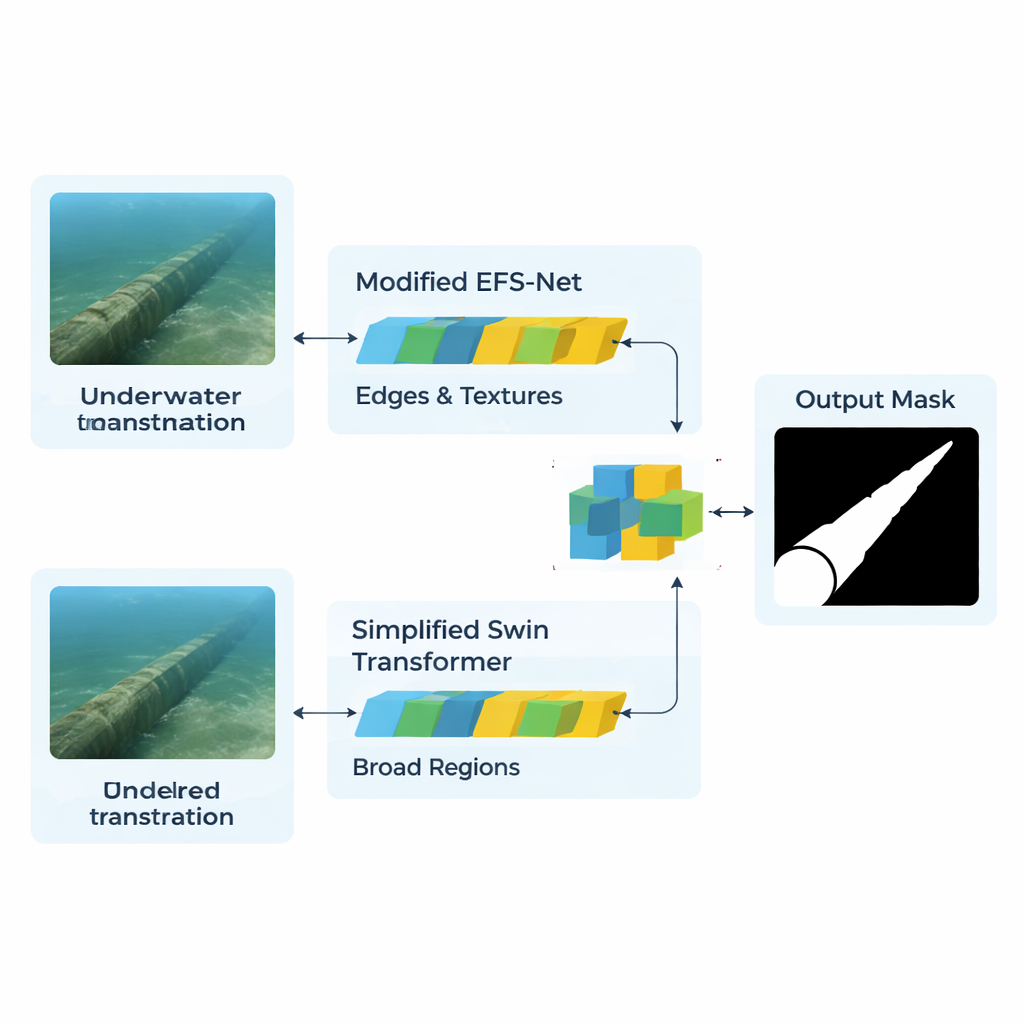
Los autores abordan esto construyendo una arquitectura de IA híbrida que combina dos “maneras de ver” muy diferentes. Una rama, basada en una versión simplificada del Swin Transformer, actúa como un observador de gran angular. Escanea todo el fotograma para comprender patrones a gran escala, como la ruta general de una tubería a lo largo del lecho marino. La segunda rama, adaptada de un modelo llamado EFS-Net y potenciada por una columna vertebral EfficientNet, se comporta como una lupa. Se concentra en detalles finos—bordes, texturas y estructuras delgadas que revelan dónde empieza la tubería y dónde termina la arena o la vegetación. Ambas ramas procesan las mismas imágenes redimensionadas y las convierten en mapas de características internos que describen lo que la red considera estructuras relevantes en cada región de la imagen.
Dejar que la atención decida qué importa
Apilar simplemente las salidas de estas dos ramas crearía un enredo de información redundante. En su lugar, el modelo utiliza un mecanismo de "atención" para decidir, píxel a píxel, qué detalles merecen foco. Un módulo de atención cruzada con tres cabezas compara las características de la rama centrada en el detalle con las de la rama centrada en el contexto. En esencia, la rama de detalle formula preguntas concretas—“¿Este borde forma parte de una tubería?”—mientras que la rama de contexto aporta pistas globales—“¿Tiene sentido que una línea en esta posición y dirección sea parte de una tubería?” Un paso de refinamiento adicional, llamado CBAM, potencia aún más la señal de las regiones con probabilidad de ser tubería y atenúa el ruido de fondo como rocas, algas o partículas en suspensión. Una red decodificadora reconstruye gradualmente una máscara a tamaño completo que marca cada píxel como tubería o no.
Poner el sistema a prueba
Para evaluar si este diseño funciona en la práctica, los investigadores reunieron un conjunto de datos amplio y exigente llamado HOMOMO. Contiene más de 120.000 imágenes en color de tuberías reales en el lecho marino tomadas a lo largo de 1,2 kilómetros de tubería bajo condiciones variadas y a menudo hostiles: baja luz, niebla marina, "nieve" flotante, bancos de arena y abundante crecimiento vegetal. Entrenaron su modelo con una parte de esta colección y luego lo compararon con sistemas ampliamente usados como UNet, DeepLab, SwinUNet, TransUNet, Mask2Former y varias versiones del detector de objetos YOLO. En HOMOMO, su modelo híbrido segmentó correctamente los píxeles de tubería con un índice medio de intersección sobre unión de alrededor del 98%, notablemente superior al mejor método competidor. Igualmente importante, cuando se probó—sin reentrenamiento—en dos fuentes de imagen muy distintas, un conjunto sintético de Roboflow y metraje real de YouTube, el modelo mantuvo un rendimiento sólido, mostrando que puede adaptarse a nuevas cámaras y condiciones acuáticas.
Qué significa esto para el océano real
Para quienes no son especialistas, la conclusión es que este sistema de IA puede delinear de forma fiable las tuberías submarinas en fotogramas de vídeo que son demasiado ruidosos e inconsistentes para los métodos convencionales. Al combinar una vista global de la escena con un ojo agudo para bordes y texturas, y al usar la atención para fusionar estas perspectivas, el modelo alcanza una alta precisión sin requerir una potencia de cálculo masiva. En términos prácticos, una herramienta así podría ayudar a robots autónomos a monitorear continuamente largas secciones de infraestructura submarina, señalando posibles daños o enterramientos para la revisión humana. Aunque todavía tiene dificultades con tuberías extremadamente finas o completamente ocultas, el enfoque representa un paso importante hacia inspecciones más seguras y automatizadas de la plomería oculta que sustenta las redes modernas de energía y comunicaciones.
Cita: Hosseini, N., Mohanna, F. & Moghimi, M.K. Integrating simplified Swin-T with modified EFS-Net for attention-guided underwater pipelines segmentation in complex underwater environments. Sci Rep 16, 6987 (2026). https://doi.org/10.1038/s41598-026-38081-x
Palabras clave: tuberías submarinas, segmentación de imágenes, aprendizaje profundo, inspección marítima, redes transformer